分数PI算法在自动电压调节中的鲁棒优势
PDF格式 | 1.83MB |
更新于2025-01-16
| 96 浏览量 | 举报
"自动电压调节中的二自由度分数PI算法及其鲁棒性优势"
本文探讨了在自动电压调节(Automatic Voltage Regulation, AVR)中应用的二自由度分数阶比例积分(Fractional Order Proportional Integral, FOPI)算法,强调了其在确保电力系统稳定性和鲁棒性方面的优势。AVR系统的主要任务是维持同步发电机的无功功率在需求水平,以保持电压稳定和电源频率不变。随着分布式发电和快速变化负载的增加,电力系统面临的挑战加剧,因此需要更为高效和鲁棒的控制策略。
二自由度FOPI控制器是本文提出的一种创新设计,它突破了传统整数阶控制器的限制,提供了更多的设计自由度,从而提高了控制器的性能。利用鲸鱼优化算法(Whale Optimization Algorithm, WOA)对控制器参数进行优化,确保了AVR系统在面对参数摄动和干扰时能保持稳定性能。通过新提出的性能指标参数整定,该方法可以显著改善AVR的动态响应,如过冲和建立时间可减少约50%,相比现有方案有明显提升。
电力系统中,电压波动可能导致设备故障、系统孤立甚至线路跳闸,因此电压调节器的重要性不言而喻。维持无功功率的稳定性是保持电力系统平衡的关键。二自由度FOPI控制器的设计考虑了现实世界中的各种扰动,提高了系统对不确定性和干扰的抵抗能力,增强了系统的稳定性和可靠性。
此外,本文还通过仿真和分析证明了所提出的二自由度分数阶PI控制器的鲁棒性优势,这些分析结果支持了该方法在实际电力系统应用中的潜力。这项工作不仅为电力系统控制提供了新的解决方案,也为未来的研究开辟了新的方向,特别是在分数阶控制理论和鲁棒优化方法的应用上。
二自由度分数PI算法在自动电压调节中的应用展示了其在应对复杂电力系统环境时的卓越性能和鲁棒性,有望成为提升电力系统稳定性和效率的有效工具。这一研究成果对于电力工程师和研究人员来说,具有重要的理论价值和实践指导意义。
诉帕迪亚奇湾梅塔,
S
。
Azid
等人
工程科学与技术,国际期刊
30
(
2022
)
101046
3
微积分(FC)已经出现在一个显着的快速步伐,因为过去十年的最佳调
谐参数。在此基础上发展了FOPID控制器,并在控制工程领域取得了显
著的成果。FC理论不仅用于PID,而且用于模糊逻辑领域,如表1中概
述的文献所示。
可以推断,在过去的十年中,最常用的元启发式算法是
PSO
,
WOA
是第二个最常用的。此外,整数阶和
1DOF
方案是最常用的
PID
研究。然而,在
[2
,
6
,
14
,
26
,
33
,
32
,
38]
中,
2DOF
控制
结构已经成为鲁棒控制策略的突出方法,特别是对于
AVR
系统。这
是由于满足负载侧控制的额外自由度。与其他复杂的解决方案相比,
2DOF
被认为是结构简单且易于另一方面,在动作中包含分数阶比经
典
PID
在
[6
,
8
,
9
,
13
,
15
,
22
,
24
,
28
,
37]
因此,在这项工作中,分数阶
PI
,即
2DOF FOPI
,控制器的设
计具有一种新的形式与系统反馈的变化新的控制器推导出
AVR
系统
的性能已经研究了一些方法。本文显示了有前途的结果比最近的作品
对
2DOF PI
相同的植物。简要地说,这项工作可归纳如下。
一个有重点的审查表知道的数量Meta启发式算法,采用AVR系统。
设计了一种新的控制器形式,即2DOF FOPI及其与2DOF PI的评估
[38]和具有状态反馈的2DOF PI[2]。要注意的是,它消除了证明,
看看它是否比1DOF PI或经典PID更好,这已经在[2]中显示。
调整各种形式的
2DOF
控制器与一个新的性能指标优化使用
PSO
和
WOA
。
验证了鲁棒性和各种时间参数的性能。
为了说明二自由度FOPI控制器的优越性,本文将PSO与WOA调整
的二自由度FOPI控制器、WOA调整的二自由度FOPI控制器和最近发
表的文献[2]的结果进行了比较和讨论。此外,对于所考虑的应用程序,
目标是在不增加解决方案复杂性的情况下实现多个要求。
文章组织如下。在全面回顾
AVR
控制方法后,第
3
简要介绍
AVR
系统模型。其次是有用的
2DOF
激励设计方案在第
4
节和
2DOF FOPI
的建议方案在第
5
。在第
6
节中解释了具有各种结果的详细分析以使
这种技术占上风。最后,第
7
节包括进一步研究的建议值得注意的
是,在这项工作中,整数阶已被分数阶取代在本工作中用于分数运算
符的定义和实现可以在附录
A
中找到,以开始该方法。
3.
AVR
系统模型及其参数
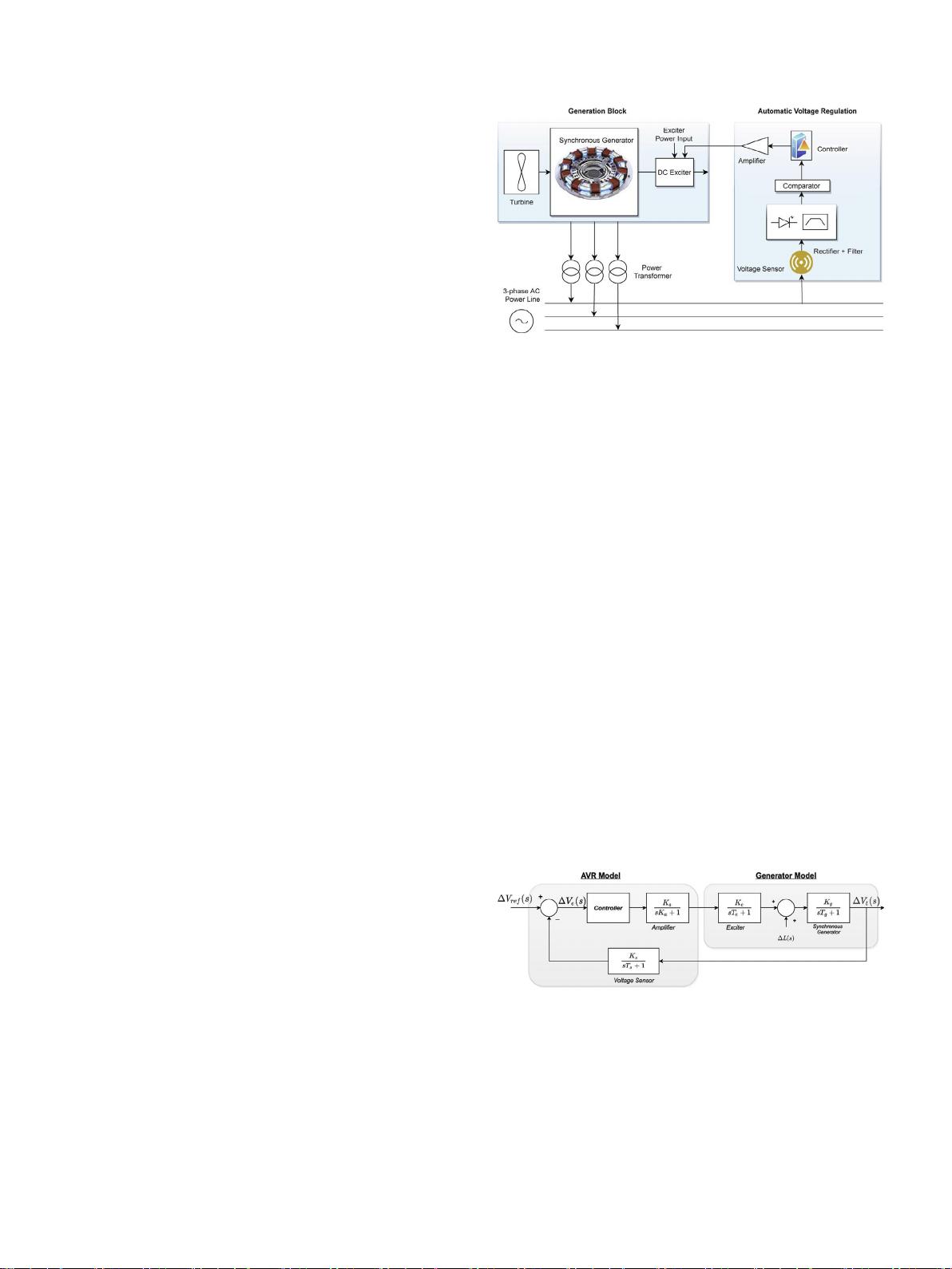
AVR系统是同步发电机(SG)中的直流励磁控制器。该系统保持
SG的端电压管理,这反过来又保持无功功率处于平衡,并有助于系统的
稳定性和可靠性。一般来说,要控制的AVR系统是一个单区域网络,它
由放大器、励磁机、发电机、电压传感器和比较器组成,如图2所示。
此外,同步发电机因此,一个基因-
图二
.
一种用于蒸汽发生器的可控
AVR
系
统。
发电机输出功率为
8MW
,电压为
240V
,频率为
50Hz
。在本研究
中,考虑如图
3
所示的线性化模型,其中电压传感器接收端子电压
Vt
该信号被整流、滤波,然后与表示为
Vref
的
设定电压进行比较。现在
控制器经过比较,产生一个误差信号。这有助于做出改变直流励磁机
动作的决定。 参见图
3
、在直流励磁机和控制器之间有一个放大器。
直流励磁机的改变是通过控制器来完成的,控制器通过励磁机电路来
控制发电机的励磁绕组。表
2[44
,
2]
给出了线性化模型参数的值。从
一阶时间常数传递函数出发,利用
AVR
系统的各个部分表
2
显示了本
研究中使用的每个模块的传递函数模型
4.
二自由度控制方法
由于蒸汽发生器的运行条件随负荷和系统参数的变化而变化,因
此控制器必须具有鲁棒性和自适应性。因此,系统需要合适类型的控
制器和结构。反馈提供了一个输入和输出之间的差异,通常用于设定
点跟踪和干扰
rejec
和灰。正如理论所示,控制工程中的自由度仅仅
意味着可以独立调节的闭环传递函数的数量
[45]
。通常,在研究中主
要建议使用单自由度(
1DOF
)然而,从研究中证明了一自由度仅支
持系统的设定点侧。而在二自由度(
2DOF
)结构中,负载侧在控制
方面也是完全覆盖的 在
[45]
中,从
1DOF
到
2DOF
的方法已经得到了
很好的验证,并在概念上由图
10
所示。 四、
在图4中,假设A是干扰最优,B是设定点最优,C是2DOF控制器的
实现区域,A到B是帕累托最优。上述障碍给控制工程师留下了两种选
择。或者选择帕累托最优点之一或者使用扰动最优参数并对设定点变量
的变化施加限制(即,对
Vref
使用速率限制器)。在早期的工艺工程情况
图三
. AVR
系统的线性模型。
●
●
●
●
剩余10页未读,继续阅读
相关推荐




cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网页自动刷新工具 v1.1 - 自定义时间间隔与关机
- pt-1.4协程源码深度解析
- EP4CE6E22C8芯片三相正弦波发生器设计与实现
- 高效处理超大XML文件的查看工具介绍
- 64K极限挑战:国际程序设计大赛优秀3D作品展
- ENVI软件全面应用教程指南
- 学生档案管理系统设计与开发
- 网络伪书:社区驱动的在线音乐制图平台
- Lettuce 5.0.3中文API文档完整包下载指南
- 雅虎通Yahoo! Messenger v0.8.115即时聊天功能详解
- 将Android手机转变为IP监控摄像机
- PLSQL入门教程:变量声明与程序交互
- 掌握.NET三层架构:实例学习与源码解析
- WPF中Devexpress GridControl分组功能实例分析
- H3Viewer: VS2010专用高效帮助文档查看工具
- STM32CubeMX LED与按键初始化及外部中断处理教程
