GLTR: 视频人物重识别的全局-局部时间表示与性能分析
PDF格式 | 1.51MB |
更新于2025-01-16
| 91 浏览量 | 举报
本文主要探讨了视频人物重识别领域的创新方法——全局-局部时间表示(GLTR),由李佳宁、王敬东、田琦、高文和张世良这几位来自北京大学和华为诺亚方舟实验室的研究者提出。GLTR旨在通过综合处理视频序列中的多尺度时间线索,提升视频人物识别的性能,尤其是在解决遮挡和噪声问题上。
GLTR方法的核心思想是首先聚焦于短时间尺度上的局部时间线索,即利用parallel-dilated卷积网络对相邻帧之间的运动模式和速度变化进行建模,捕捉行人个体的动态特征。这种技术有助于区分那些穿着相似衣物但动作各异的个体,如图1所示的两个在MARS数据集中外观相似但行为不同的行人。
其次,GLTR引入了时间自注意力模型,这一模型能够处理视频序列中的长期关系,即使在存在遮挡和噪声的情况下也能保持稳定的表现。它通过对不连续帧间的联系进行建模,增强了模型对复杂时空场景的理解和适应能力。
值得注意的是,GLTR并没有依赖额外的CNN输入,如光流,而是通过单一的卷积神经网络(CNN)将短期和长期时间线索整合在一起,形成最终的表示。这种设计简化了模型架构,提高了效率。实验结果显示,GLTR在MARS数据集上实现了87.02%的Rank-1准确度,显示出其在性能上的显著优势,超越了当时的最新技术。
GLTR方法代表了视频人物重识别领域的一个重要突破,它强调了时间线索的有效利用和复杂时空关系的捕捉,对于提高视频监控和刑事侦查等实际应用中的人员再识别能力具有重要意义。未来的研究可能进一步探索如何结合更多元的时间特征和空间信息,以实现更高的识别精度。
3960
ぬ穴 抜劇
转置
B
ぬ穴 抜劇
ぬ穴 抜な
conv
softmax
M
conv
conv
C
池化
conv
軸
博
げ
不
不
不
不
不
tt
不
1 2
T
t
1 2
T
穴 抜劇
穴 抜劇
帧
特征
軸
軸旺
扩展颞金字塔(DTP)
N=3的卷积
时间自我注意(TSA)
軸旺旺
GLTR:f
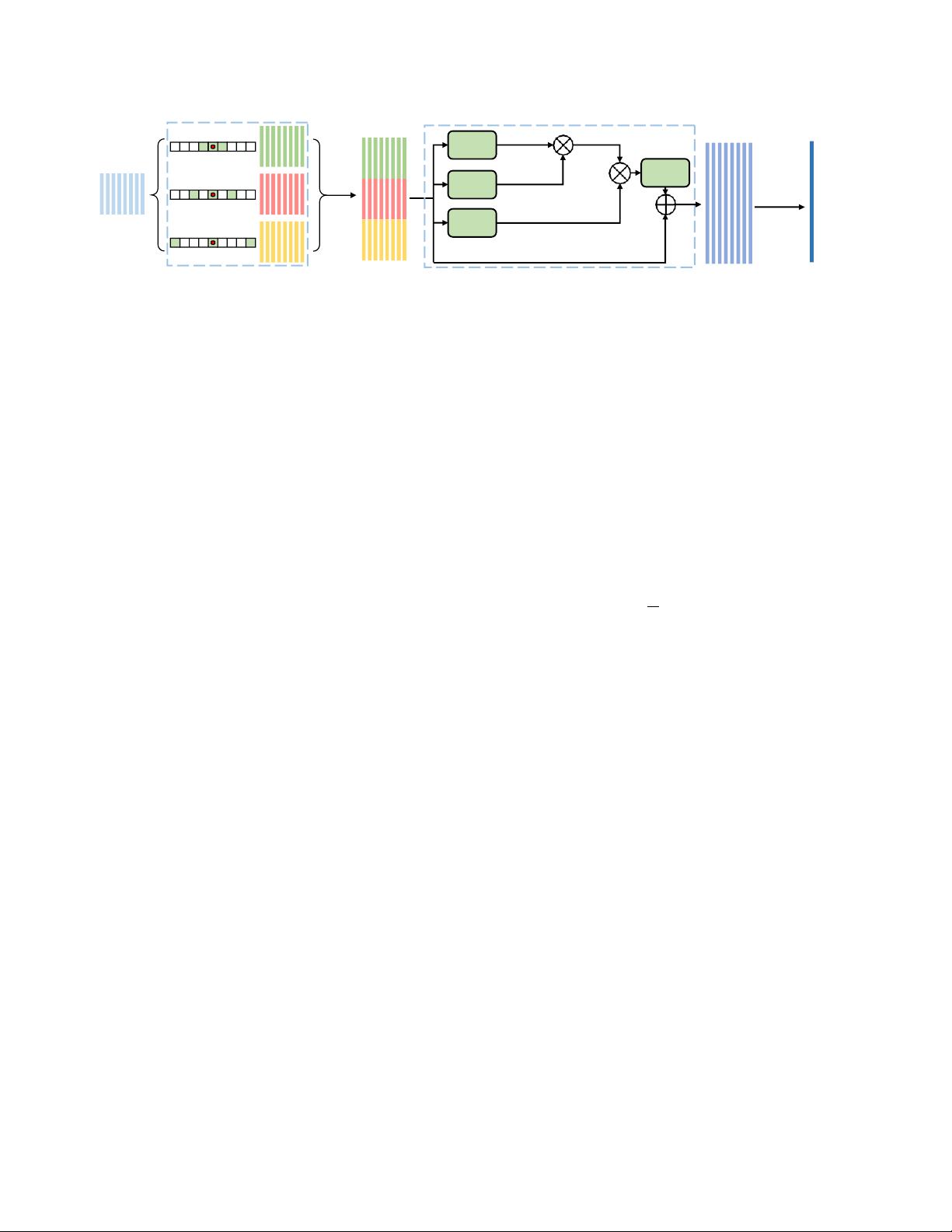
图
2.
说明我们的帧特征聚合子网络的
GLTR
提取,其中包括扩张的时间金字塔(
DTP
)卷积的局部时间上下文学习和时间自我
注意力(
TSA
)模型,以利用全球的时间线索。
3.
提出方法
3.1.
制剂
视频人ReID旨在从包含
K
个视频的图库集中识别与
查询视频有关的图库视频。图库视频表示为
G
k
={
I
k
,
I
k
,
...
,
I
k
k
}
,其中
k
∈ {1
,
2
,
.
,
K},
且
将
F
′
作为输入并输出时间特征
F
′′
=
{
f
′′
,
f
′′
,
. . .
,
f
′
}
。
每个
f
′′
∈
F
′′
是通过
考虑
F′
内部特征之间的上下文关系
来计算的
,
即,
、
f
′′
=M
TSA
(F
′
,
f
′
)
,
(
3
)
其中
M
TSA
是
TSA
模型。
每一
个
f
"
都
聚集了局部和全局的时间线索。
1 2
T
q q q
k
t
查询视频由Q
=
{
I1
,
I2
,
...
,
I
T
q
},其中T
(T
q
)表示序列中的帧的数量,并且I
k
(I
q
)是第t帧。图库视频
G
将被标识为
最后,我们在F ′′上应用平均池化来生成视频人ReID的
固定长度GLTR f,
即
、
∑
T
true positive,如果它与查询的距离最近
在视频表示上,
即
、
f
=
1
不
t
=1
f
′′
。
(
四)
G
=
arg min dist
(
f
G
k
,
f
Q
)
,
(
1
)
K
其中
f
G
k
和
f
Q
分别是图库视频
G
k
和查询视频
Q
我们的方法由两个子网络组成,用于学习一个离散
的神经网络。
犯罪视频表示
f
,
即
、图像特征提取
子网和帧特征聚
合子网。 第一个子网络提取
T
帧的特征,
即
T
帧。
,
F
=
{
f1
,
f2
,
. . .
,
fT
}
,
其中
ft
∈
Rd
.
的
第二子网络将所述T帧特征聚合成
单个视频表示向量。我们说明了第二个子网络,这是
图中这项工作的重点。2.我们在下面的段落中简要地
演示了DTP和TSA的计算
DTP
被设计为捕获相邻帧之间的局部时间如图
2
、
DTP
将
F
中的帧特征作为输入,输出更新后的帧
特征
F
′
={
f
′
,
f
′
,
. . .
,
f
′
}。计算每个
f
′
∈
F
′
平均池化也通常应用于RNN [30]和3DCNN [19]中,以
生成固定长度的视频特征。每个
f
′ ′
中
嵌入的全局和局
部时间线索保证了
f ′
的强鉴别能力和鲁棒性。接下来
介绍了DTP和TSA的设计。
3.2.
扩展时间金字塔卷积
扩展时间卷积:扩张空间卷积因其有效的空间上下文
建模能力而广泛用于图像分割[52]。受扩展空间卷积
的启发假设W
∈ R
d
×
w
是一个卷积核,
宽度w
.
对于输入帧特征
F
=
{f
1
,
f
2
,
. . .
,
fT}
,
扩张率为
r
扩张卷积的输出
F
(
r
)
可以定义为,
F
(
r
)
=
{
f
(
r
)
,
f
(
r
)
,
.
,
f
(
r
)
}
,
∑
w
1 2
T
t
f
(
r
)
= f
×
W
(
r
)
,
f
(
r
)
∈
Rd
,
(
5
)
通过聚集其相邻的帧特征,
即,
、
f
′
= M
DTP
(
f
t− i
,
.
,
f
(
t
+
1
)
,
(
2
)
不
i
=1
[t+r
·
i]
[i]
t
不
其中,
MDTP
表示
DTP
模型,并且
f
′
是从2 × i
个
相
邻帧计算的。
TSA模型利用了因康-
连续帧以捕获全局时间线索。它
扩张率=1
concat
扩张率=2
扩张率=4
剩余12页未读,继续阅读
相关推荐



8 浏览量
7 浏览量
4 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
