手持扫描仪联合估计姿态、几何和svBRDF的研究
PDF格式 | 13.14MB |
更新于2025-01-16
| 118 浏览量 | 举报
1
3493
0
关于从手持扫描仪联合估计姿态、几何和svBRDF的研究
0
CarolinSchmitt1,2,SimonDonn´e1,2,GernotRiegler3VladlenKoltun3AndreasGeiger1,2
0
1MaxPlanck智能系统研究所,图宾根2图宾根大学3
英特尔智能系统实验室
0
{名字.姓氏}@tue.mpg.de{名字.姓氏}@intel.com
0
摘要
0
我们提出了一种新的公式,用于联合恢复相机姿态、对象几
何和空间变化的BRDF。我们方法的输入是由移动手持扫描
仪捕获的一系列RGB-D图像,该扫描仪使用点光源主动照亮
场景。与先前从手持扫描仪联合估计几何和材料的方法相比
,我们使用一个单一的目标函数来表述这个问题,可以使用
现成的基于梯度的求解器进行最小化。通过将材料聚类作为
一个可微分的操作集成到优化过程中,我们避免了预处理启
发式方法,并证明我们的模型能够独立确定正确的镜面材料
数量。我们对我们公式中每个组成部分的重要性进行了研究
,并对初始几何的要求进行了研究。我们表明,优化姿态对
于准确恢复细节至关重要,并且我们的方法自然地产生了一
个语义上有意义的材料分割。
0
1.引言
0
重建物体的形状和外观是计算机视觉和图形学中一个长期的
目标,具有从远程存在到在真实环境中训练具有身体感的代
理的众多应用。虽然新颖的深度感知技术(例如Kinect)实
现了大规模的3D重建[12,61,
87],但提供的真实感有限,因为没有考虑物理光传输。因
此,材料属性无法恢复,而镜面反射或阴影等照明效果则被
合并到纹理组件中。材料属性可以通过使用专用光源[26,
40,49]直接测量,也可以通过假设已知[15,36,
65]或平坦[3,4,29,
76]的对象几何从图像中推断出来。然而,大多数设置要么
仅限于实验室环境、平面几何,要么难以在“野外”使用,
因为它们假设对齐的3D模型或扫描。
0
具有相等贡献的共同第一作者。
0
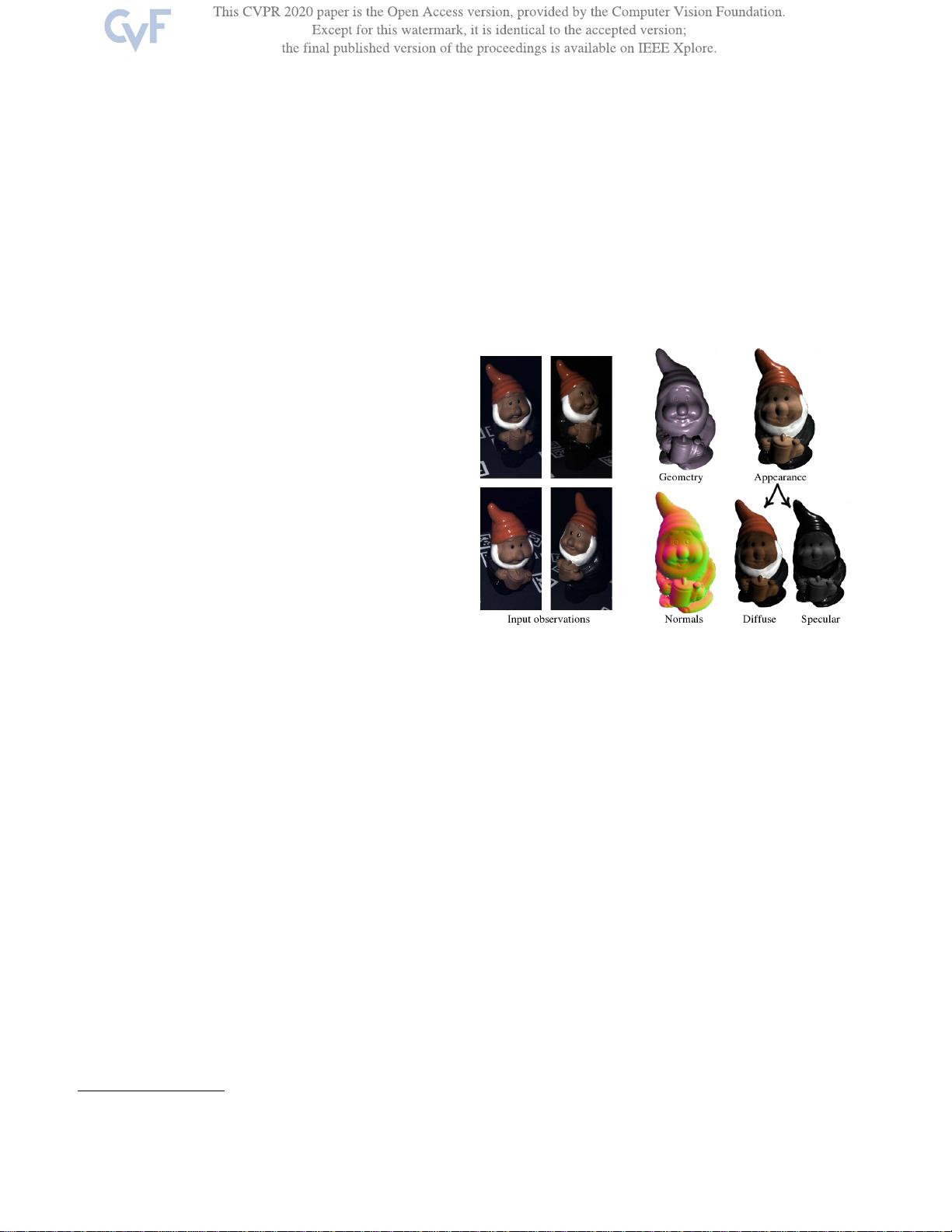
图1:插图。基于由手持扫描仪捕获的带有点光源照明的图
像,我们使用一个单一的目标函数联合优化相机姿态、表面
几何和空间变化的材料。
0
理想情况下,对象的几何形状和材料属性是同时推断的:良
好的光传输模型可以使用阴影线索恢复几何细节。准确的形
状模型又有助于估计材料属性。这对于光滑表面特别重要,
因为几何形状的微小变化会极大地影响镜面反射的外观和位
置。然而,同时优化这些量(如图1所示)是具有挑战性的
。一些研究已经通过假设从静态相机获取多个图像[16,21,
23,28,
105]来解决这个问题,但这对于移动扫描应用是不实际的。
只有少数研究考虑了从手持设备中联合估计几何形状和材料
的挑战性问题[20,24,
57]。然而,现有方法假设已知相机姿态,并利用复杂的流
程将问题分解为使用多个解耦目标和优化算法单独处理几何
形状和材料的较小问题。此外,必须提供基本材料的数量和
/或需要预处理以相应地对对象表面进行聚类。

剩余10页未读,继续阅读
相关推荐




cpongm
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- Windows环境下Oracle RAC集群安装步骤详解
- PSP编程入门:Lua教程详解
- GDI+ SDK详解:罕见的技术文档
- LoadRunner基础教程:企业级压力测试详解
- Crystal Reports 7:增强交叉表功能教程与设计技巧
- 软件开发文档编写指南:从需求分析到经济评估
- Delphi 使用ShellExecute API详解
- Crystal Reports 6.x 的交叉表功能与限制解析
- 掌握Linux:60个核心命令详解
- Oracle PL/SQL 存储过程详解及应用
- Linux 2.6内核基础配置详解与关键选项
- 软件工程需求与模型选择:原型化与限制
- 掌握GCC链接器ld:中文翻译与实用指南
- Ubuntu 8.04 安装与入门指南:新手快速上手必备
- 面向服务架构(SOA)与Web服务入门
- 详解Linux下GNUMake编译工具使用指南
