PanopticSegFormer:Transformer引领的全景分割新高度
69 浏览量
更新于2025-01-16
收藏 982KB PDF 举报
“PanopticSegFormer:使用Transformers提升全景分割性能”
本文介绍了一种名为PanopticSegFormer的新框架,该框架旨在改进全景分割任务的性能,结合了语义分割和实例分割的优势。全景分割是计算机视觉领域的重要任务,旨在将图像内容划分为“事物”(可数实例)和“东西”(背景或不可计数对象)两类。
PanopticSegFormer的创新之处在于它采用了Transformer架构,这种架构在自然语言处理和计算机视觉领域都表现出色。Transformer的引入带来了三个关键组件:
1. **深度监督掩码解码器**:这个组件对注意力模块进行逐层监督,使模型能够更快地聚焦于有意义的语义区域。这种深度监督策略提升了模型的学习效率,同时减少了训练所需的时间,对比可变形DETR,性能得到提高,训练速度翻倍。
2. **查询解耦策略**:此策略将查询集的职责分离,防止事物实例之间的相互干扰。这样可以更准确地区分不同的实例,降低混淆的可能性。
3. **改进的后处理方法**:针对冲突的掩码重叠,该策略通过同时考虑分类和分割质量来解决,提高了性能,且无需额外计算成本。
实验表明,PanopticSegFormer在COCO测试开发集上取得了最先进的结果,PQ(Panoptic Quality)达到56.2%,相比基线DETR模型提升了6.2%的准确性。此外,该方法还显示出了强大的零射击(zero-shot)鲁棒性,意味着它能在未见过的类别上表现出色。
图1展示了PanopticSegFormer与现有技术在COCOval2017拆分上的比较,显示了其在不同参数设置下的性能优势。这表明,即使在较低的参数量下,PanopticSegFormer也能保持较高的分割质量,证明了其效率和有效性。
PanopticSegFormer为全景分割提供了一个新的视角,通过Transformer架构和特定的设计决策,提高了模型的性能和训练效率,对于未来的研究和应用具有重要价值。
1282
∈
×
×
× ×
×
通过变压器进行端到端的全景分割。DETR [1]预测事
物和材料的边界框,并结合Transformer解码器的注意
力图和 ResNet [23]的特征图来执 行全景分割 。Max-
Deeplab [2]通过双路径Transformer方面直接预测对象
类别和遮罩
地面
实
况
查询
偶匹配
(
一
)
固定分配
偶匹配
(
b
)第(
1
)款
而不是东西在DETR之上,MaskFomer [3]使用了一个
额外的像素解码器来细化高空间分辨率的特征,并通
过将来自像素解码器的查询和特征相乘来生成掩码。
由于自我注意的计算复杂性[24],DETR和MaskFormer
都使用具有有限空间分辨率的特征图进行全景分割,
这损害了性能,并且需要在最终掩模预测中组合额外
的高分辨率特征图与上面提到的方法不同,我们的查
询解耦策略使用单独的查询集处理事物和内容。尽管
事物和材料查询是针对不同的目标而设计的,但它们
由掩码解码器以相同的工作流程进行处理这些查询的
预测结果是相同的格式,以便我们可以以平等的方式
处理它们,
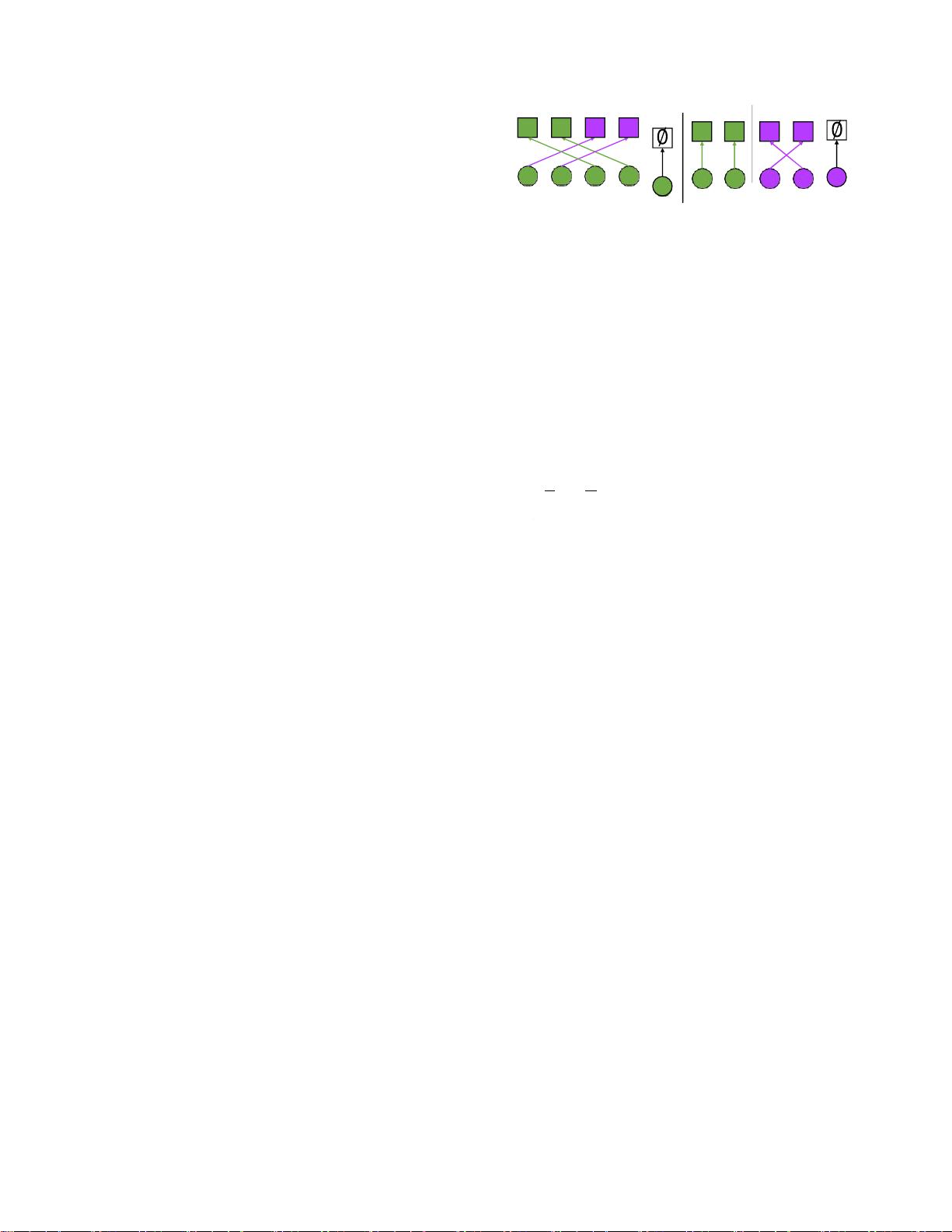
图
3.
(
a
)方法
[1
(紫色方块)和填充物(绿色方块)。(b)我们使用一个事物
查询集(紫色圆圈)通过二分匹配来定位事物,使用一个内
容查询集(绿色圆圈)通过类固定分配策略来预测内容查询
被分配给不匹配的查询。
骨干,(2)位置解码器被设计用于捕获事物的位置线
索,以及(3)掩码解码器用于最终分类和分割。
该结构 将一幅输入图 像X R
H×W×
3
送入
主干网
络,从最后三个阶段获得特征图
C3
、
C4
和
C5
,其分辨率
分别为输入图像的1/8、1/16和1/32。 我们
通过一
个全连接(
FC
)层将这三个特征映射投影到具有
256
个通道的特征映射上,并将它们平坦
化为特征向
量
C3
′
,
C4
′
和
C5
′
。在这里,我们
-
完成后处理程序。一个并发工作[4]
细L
i
H
2
i
+2
W
2
i
+2
C3
′
、
C4
′
和
C5
′
的形状是
采用类似的思路,使用动态内核来执行实例和语义分
割,其目的是利用统一的内核来处理各种分割任务。
与此相反,我们的目标是深入研究基于Transformer的
全景分割。由于各种任务的性质不同,统一的流水线
是否适合这些任务仍然是一个悬而未决的问题。在这
项工作中,我们利用一个额外的位置解码器,以协助
事情学习位置线索,并获得更好的结果。
端到端目标检测。最近流行的端到端对象检测框架
启发了许多其他相关工作[13,25]。DETR [1]可以说
是这些方法中最具代表性的端到端对象检测器DETR将
对象检测任务建模为具有可学习查询的字典查找问
题,并采用编码器-解码器Transformer来预测边界框,
而无需额外的后处理。DETR大大简化了传统的检测框
架,并删除了许多手工制作的组件,如非最大抑制
(NMS)[26,27]和锚[27]。Zhu等[12]提出了可变形
DETR,通过可变形注意层进一步降低了内存和计算成
本。 在 本文 中, 我 们采用 可 变形 注意 力 [12]来 改进
DETR [1]上的效率和收敛性。
3.
方法
3.1.
整体架构
如图2所示,Panoptic SegFormer由三个关键模块组
成:Transformer编码器、位置解码器和掩码解码器,
其中(1)Transformer编码器用于细化由
L
1
256
、
L
2
256
和
L
3
256
。接下来,使用
串接的特征令
牌 作 为 输 入 , Transformer
编 码 器 输 出 大 小 为
(
L1
+
L2
+
L3
)的细化特征
256。然后,我们使用第
N
次
和第
N
次
随机初始化的东西和东西查询来描述的
东西和东西分开。 定位解码器通过检测事物的边界
框来获取位置信息,从而细化第
N
个事物查询
.
然
后,掩码解码器将事物和填充查询作为输入,并在
每一层预测掩码和类别
在推理过程中,我们采用了一种基于掩模的合并策
略,将来自最终掩模解码器层的预测掩模三点五
3.2.
Transformer编码器
高分辨率和多尺度特征图对于分割任务很重要[7,
21,28]。 由于自注意层的高计算成本,基于复杂变
换的方 法[1,3]只能处理低分 辨率特征图(
例如
,
ResNetC
5
)在他们的编码器,这限制了分割性能。与
这些方法不同,我们采用可变形注意力[12]来实现我
们的Transformer编码器。由于可变形注意力的低计算
复杂度,我们的编码器可以细化并涉及位置编码[24]
到高分辨率和多尺度特征图F。
3.3.
解码器
在本节中,我们首先介绍我们的查询解耦策略,然
后我们将解释我们的位置解码器和掩码解码器的细
节。
作
为
剩余11页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
206 浏览量
475 浏览量
2025-02-12 上传
112 浏览量
484 浏览量
1339 浏览量

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现程序A的监控启动机制
- Delphi与C#交互加密解密技术实现与源码分析
- 高效财务发票管理软件
- VC6.0编程实现删除磁盘空白文件夹工具
- w5x00-master.zip压缩包解析:W5200/W5500系列Linux驱动程序
- 数字通信经典教材第五版及其答案分享
- Extjs多表头设计与实现技巧
- VBA压缩包子技术未来展望
- 精选多类型导航菜单,总有您钟爱的一款
- 局域网聊天新途径:Android平台UDP技术实现
- 深入浅出神经网络模式识别与实践教程
- Junit测试实例分享:纯Java与SSH框架案例
- jquery xslider插件实现图片的流畅自动及按钮控制滚动
- MVC架构下的图书馆管理系统开发指南
- 里昂理工学院RecruteSup项目:第5年实践与Java技术整合
- iOS 13.2真机调试包使用指南及安装
