LQG/LTR在伺服控制中的应用:实验室实现与实验验证
160 浏览量
更新于2025-01-16
收藏 1.09MB PDF 举报
"基于LQG/LTR的模块化伺服参考跟踪:实验室工厂实施和实验验证"
这篇学术文章深入探讨了LQG/LTR(线性二次型-Gaussian/线性二次型-时变鲁棒)控制器在模块化伺服系统中的应用。LQG/LTR是一种综合了最优控制和状态估计的策略,它结合了LQ(线性二次型)调节器和卡尔曼滤波器,旨在优化系统的性能同时增强其对不确定性和噪声的鲁棒性。
LQ控制器设计是基于最小化一个二次型性能指标,该指标考虑了系统的输出误差和控制输入的能量。LQG控制器则进一步引入了卡尔曼滤波器,以处理系统内部状态的不确定性。卡尔曼滤波器能够提供最优的状态估计,从而帮助控制器更好地应对不可预见的干扰。
文章中,作者们首先回顾了LQ和LQG控制器的基础理论,并对比了两者在频率特性上的差异。他们特别关注了LQG控制器如何通过卡尔曼滤波器来改善系统的性能。然而,尽管LQG控制器在许多情况下表现优秀,但其对观测器的设计可能会降低系统的鲁棒性。
为了解决这个问题,LQG/LTR方法被引入。该方法的目标是通过调整卡尔曼滤波器,使得观测器的开环传递函数接近不含观测器影响的理想闭环系统。这样可以减小观测器稳定裕度对系统性能的负面影响。
在实际应用中,研究者针对模块化伺服系统进行了LQG/LTR速度控制器的设计。他们根据角位移的噪声测量数据进行控制器参数的设定。然后,通过仿真和实验室环境的实验验证了LQG/LTR控制器的效果。实验结果证明了LQG/LTR控制器在参考跟踪和鲁棒性方面的确有所提升。
文章结构清晰,分为理论背景、LQG/LTR方法的介绍以及实际应用和实验验证等部分。作者们的工作不仅提供了理论分析,还展示了实际操作的过程,为其他研究者在类似系统中应用LQG/LTR控制策略提供了宝贵的经验。
关键词涵盖了LQG/LTR控制策略的核心元素,包括卡尔曼滤波、运动系统控制以及参考跟踪技术。这些关键词反映了研究的焦点和潜在的应用领域,如自动化、机器人和精密定位系统等。
这篇文章深入研究了LQG/LTR控制器在模块化伺服系统中的应用,通过实验验证了其在提高系统鲁棒性和跟踪性能方面的有效性。这对于工业界和学术界在理解和改进伺服控制系统的设计都具有重要意义。
A. Kozáková
,
M.Hypiusová/
电气系统和信息技术杂志
2
(
2015
)
347
349
≥
F
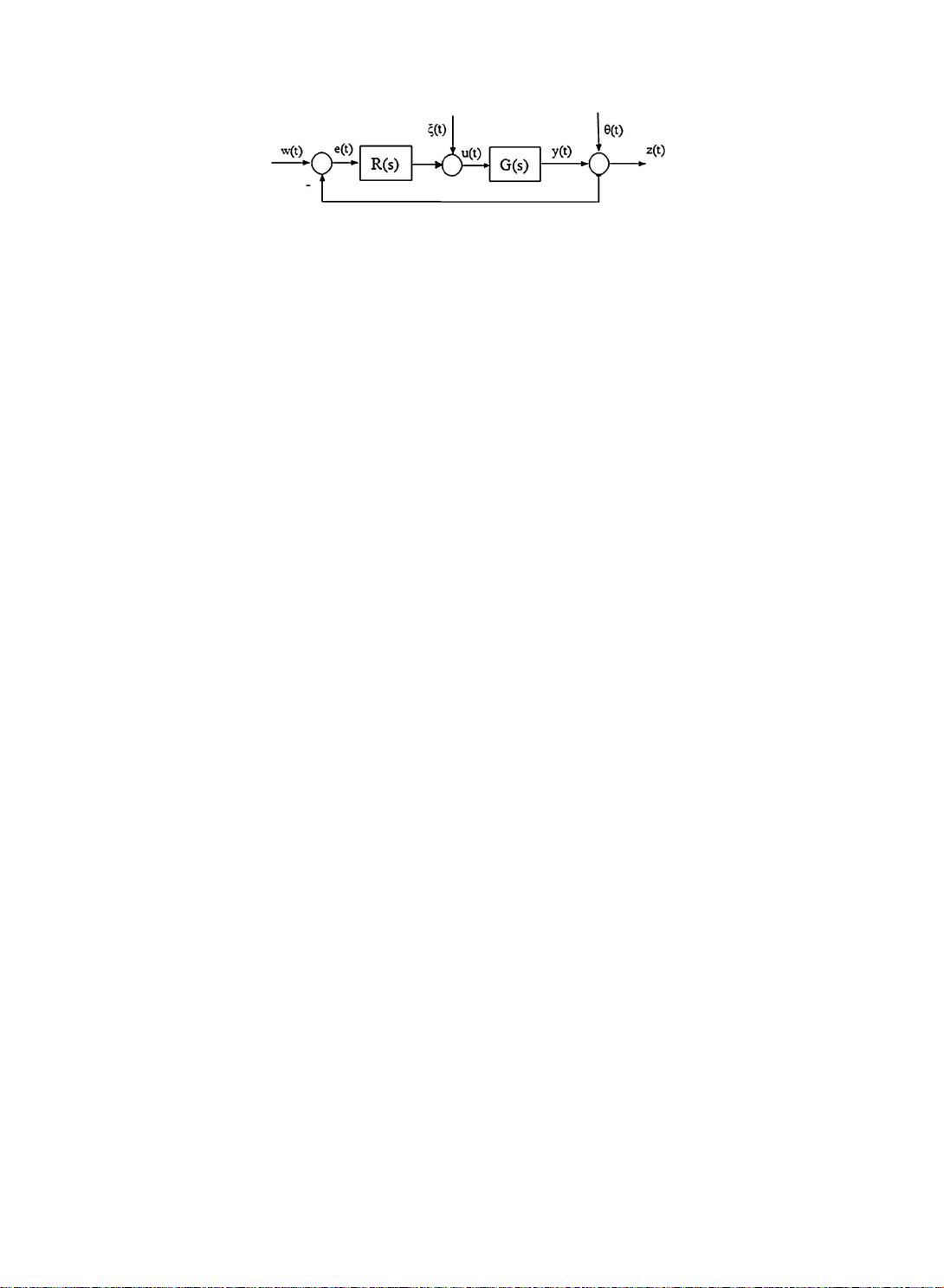
Fig. 1. 简单的反馈控制回路。
由于分离原理,卡尔曼滤波器和LQR可以分开设计(Lee,1995; Camacho等人,1997; Lewis,1992)。
考虑被控对象的状态空间模型分别受到被控对象和测量噪声
x
stec
(
t
)
=
Ax
(
t
)
+
Bu
(
t
)
+
ΓBu
(
t
)
y(t)
=
Cx(t)
+
Du(t)
+
θ(t)
(六
)、
θ(t)和θ(t)是独立的高斯白噪声,分别由它们的协方差矩阵
Qf
0和
Rf
> 0确定
卡尔曼
滤波器
的
设计是一
个
双重任务的
LQR
之一
。表示最优状态估计
x
∞
(
t
)
;
则估计误差
定义
为
:
x
(
t
)
=
x
(
t
)
−x
(
t
)(
7
)
目标是
找到
状态向量
x
∈(
t
)的最优估计,使状态估计
误差
的方差
E
[
(
x
(
t
)
−
x
<$
(
t
))(
x
(
t
)
−
x
<$
(
t
))
T
]=
E
[
x
<$
(
t
)
x
<$
(
t
)
T
]
(
8
)
其中估计误差的动态由微分方程给出
x
·
(
t
)
=
(
A
−
K
f
C)
x
(
t
)
+
Γ
(
t
)
−
K
f
θ
(
t
)(
9
)
和最优状态估计,
x
·
(
t
)
=
A
x
(
t
)
+
Bu
(
t
)
+
K
f
(
y
(
t
)
−
C
x
(
t
))
x
·
(
t
)
=
(
A
−
K
f
C)
x
(
t
)
+
Bu
(
t
)
+
K
f
y
(
t
)
卡尔曼滤波器增益矩阵K
f
根据下式计算:
K
f
=
P
f
C
T
θ
−1
P
f
=
P
T
≥
0
其中P
f
是滤波器Riccati方程
(十
)
(十
一)
P
f
A
T
+
AP
f
−
P
f
C
T
Q
f
−
1
CP
f
+
ΓR
f
Γ
T
=0
(
12
)
在设计了卡尔曼滤波器之后,通过使用估计的状态实现LQ控制律(3)
u
(
t
)
=−
K
c
x
(
t
)(
13
)
对于所有可测量状态,闭环变量的响应等于使用(3)获得的响应
2.3.
频域闭环性能评估
SISO设备最常用的频域性能测量是相对稳定性测量
- 增益和相位裕度同时指示闭环稳定鲁棒性。使用开环波特图,可以评估闭环性能以及对工厂和测量噪声的
鲁棒性。
在图1中的简单闭环结构中,设备噪声<$r(t)在低频ω
ω
处
并且在高频处的测量噪声
θ
(
t
)
ω
>
ω
θ
·
T o
保证了被控对象输出的适当参考跟踪
剩余11页未读,继续阅读
114 浏览量
260 浏览量
2022-08-04 上传
2024-11-12 上传
2025-01-08 上传
2024-11-12 上传
193 浏览量
485 浏览量
2025-01-04 上传

cpongm
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 武汉大学数字图像处理课程课件精要
- 搭建个性化知识付费平台——Laravel开发MeEdu教程
- SSD7练习7完整解答指南
- Android中文API合集第三版:开发者必备指南
- Python测试自动化实践:深入理解更多测试案例
- 中国风室内装饰网站模板设计发布
- Android情景模式中音量定时控制与铃声设置技巧
- 温度城市的TypeScript实践应用
- 新版高通QPST刷机工具下载支持高通CPU
- C++实现24点问题求解的源代码
- 核电厂水处理系统的自动化控制解决方案
- 自定义进度条组件AMProgressView用于统计与下载进度展示
- 中国古典红木家具网页模板免费下载
- CSS定位技术之Position-master解析
- 复选框状态持久化及其日期同步技术
- Winform版HTML编辑器:强大功能与广泛适用性
