drawio 32位
时间: 2024-01-25 17:00:45 浏览: 101
draw.io是一种实用的绘图工具,可以帮助用户创建流程图、思维导图、组织结构图等不同类型的图表。它可以在线使用,也可下载到个人设备上使用。而“32位”是指软件的位数,也就是在32位操作系统上运行的版本。
draw.io的32位版本适用于32位操作系统的用户。32位操作系统是一种使用32位寄存器的计算机操作系统,它可以在32位的计算机系统上运行。与64位操作系统相比,32位操作系统具有更低的内存要求和更广泛的兼容性。
使用draw.io的32位版本,用户可以充分利用32位操作系统的资源,能够更好地运行和操作软件。它支持与其他应用程序的集成,可以导入和导出各种文件格式,与不同的操作系统和多种设备兼容。无论是在个人使用还是在团队合作中,draw.io 32位版本都能提供丰富的绘图功能,帮助用户创建专业的图表和图形。
总之,draw.io的32位版本是一款方便用户在32位操作系统上使用的绘图工具,能够满足用户的绘图需求,并提供灵活的操作和易用性。无论是在教育、商业或个人用途中,draw.io都是一个很好的选择。
相关问题
docker一键安装 32位
Docker 的一键安装通常依赖于操作系统的包管理器,对于 32 位系统(也称为 x86架构),你需要找到适用于这个架构的 Docker 安装包。以下是基于 Windows 和 Linux 系统的一个简要指南:
**Windows (通过Chocolatey)**:
1. 打开命令提示符(管理员权限)。
2. 输入 `winget install Docker Desktop` 或者访问 https://store.docker.com/win-32/docker-desktop 下载并运行安装程序,选择“自定义”安装,勾选“仅安装 Docker Desktop”,然后选择32位版本。
**Linux (Debian/Ubuntu)**:
1. 更新你的包列表:`sudo apt-get update`.
2. 添加Docker的官方 apt-repo:`echo "deb [arch=amd64 signed-by=/usr/share/keyrings/docker-archive-keyring.gpg] https://download.docker.com/linux/debian buster stable" | sudo tee /etc/apt/sources.list.d/docker.list > /dev/null`.
3. 如果你有64位系统,需要切换到32位模式:`sudo dpkg --add-architecture i386`
4. 更新并安装 Docker:`sudo apt-get update && sudo apt-get install docker-ce docker-ce-cli containerd.io`
**macOS (Homebrew):**
1. 首先安装Homebrew:`/bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/main/install.sh)"`。
2. 使用Homebrew安装Homebrew-Cask,然后安装Docker for Mac:`brew cask install docker`.
注意:以上步骤可能会因为软件库的更新而有所变化,确保查阅最新的官方文档以获取最准确的指导。另外,Docker Desktop 版本可能会限制在特定的操作系统上提供32位支持,所以在安装前确认其兼容性很重要。
stm32 hal库 串口显示ds18b20 Pa3为ds18b20的gpio引脚 KEY4为pb4 使用串口3 115200波特率 使用定时器3 。编写程序,实现以下功能。 使用终端A上的扩展IO口PA3连接DS18B20温度传感器。 每当按键ASW4按下,通过串口上报温度数据一次,温度发送格式: "C:25.26\r\n" 串口发送格式(字符串) 备注: C为大写字母,温度值结果保留小数点后2位有效数字。 串口发送的字符串应包含换行、回车符号:"\r\n"。
以下是基于STM32 HAL库的代码实现,实现了按下按键ASW4后,通过串口3上报温度数据一次,温度发送格式为"C:xx.xx\r\n",其中xx.xx为浮点数格式的温度值,保留小数点后两位有效数字,字符串末尾包含"\r\n"。
```
#include "main.h"
#include "stdio.h"
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart3;
TIM_HandleTypeDef htim3;
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART3_UART_Init(void);
static void MX_TIM3_Init(void);
/* Private function prototypes -----------------------------------------------*/
void delay_us(uint32_t us);
void DS18B20_Start(void);
void DS18B20_Write(uint8_t data);
uint8_t DS18B20_Read(void);
float DS18B20_Get_Temp(void);
void send_temp(float temp);
/* Private variables ---------------------------------------------------------*/
uint8_t ds18b20_present = 0;
/* Main function -------------------------------------------------------------*/
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART3_UART_Init();
MX_TIM3_Init();
/* Start timer */
HAL_TIM_Base_Start_IT(&htim3);
/* Infinite loop */
while (1)
{
/* Wait for button press */
while (HAL_GPIO_ReadPin(KEY4_GPIO_Port, KEY4_Pin) == GPIO_PIN_SET);
/* Get temperature */
float temp = DS18B20_Get_Temp();
/* Send temperature via UART */
send_temp(temp);
/* Wait for button release */
while (HAL_GPIO_ReadPin(KEY4_GPIO_Port, KEY4_Pin) == GPIO_PIN_RESET);
}
}
/* Timer3 callback function */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == TIM3)
{
/* DS18B20 presence detection */
DS18B20_Start();
DS18B20_Write(0xCC);
DS18B20_Write(0x44);
delay_us(750000);
DS18B20_Start();
DS18B20_Write(0xCC);
DS18B20_Write(0xBE);
uint8_t byte1 = DS18B20_Read();
uint8_t byte2 = DS18B20_Read();
if ((byte1 == 0x28) && (byte2 == 0xFF))
{
ds18b20_present = 1;
}
else
{
ds18b20_present = 0;
}
}
}
/* Send temperature via UART */
void send_temp(float temp)
{
char buffer[16];
sprintf(buffer, "C:%.2f\r\n", temp);
HAL_UART_Transmit(&huart3, (uint8_t *)buffer, strlen(buffer), 1000);
}
/* Get temperature from DS18B20 */
float DS18B20_Get_Temp(void)
{
float temp = 0;
if (ds18b20_present)
{
DS18B20_Start();
DS18B20_Write(0xCC);
DS18B20_Write(0x44);
delay_us(750000);
DS18B20_Start();
DS18B20_Write(0xCC);
DS18B20_Write(0xBE);
uint8_t byte1 = DS18B20_Read();
uint8_t byte2 = DS18B20_Read();
int16_t raw = (byte2 << 8) | byte1;
if (raw & 0x8000)
{
raw = ~raw + 1;
temp = -(float)raw / 16.0;
}
else
{
temp = (float)raw / 16.0;
}
}
return temp;
}
/* Read one byte from DS18B20 */
uint8_t DS18B20_Read(void)
{
uint8_t data = 0;
for (int i = 0; i < 8; i++)
{
HAL_GPIO_WritePin(PA3_GPIO_Port, PA3_Pin, GPIO_PIN_SET);
delay_us(2);
HAL_GPIO_WritePin(PA3_GPIO_Port, PA3_Pin, GPIO_PIN_RESET);
delay_us(2);
data |= HAL_GPIO_ReadPin(PA3_GPIO_Port, PA3_Pin) << i;
delay_us(60);
}
return data;
}
/* Write one byte to DS18B20 */
void DS18B20_Write(uint8_t data)
{
for (int i = 0; i < 8; i++)
{
HAL_GPIO_WritePin(PA3_GPIO_Port, PA3_Pin, GPIO_PIN_RESET);
delay_us(2);
HAL_GPIO_WritePin(PA3_GPIO_Port, PA3_Pin, (data & (1 << i)) ? GPIO_PIN_SET : GPIO_PIN_RESET);
delay_us(60);
HAL_GPIO_WritePin(PA3_GPIO_Port, PA3_Pin, GPIO_PIN_SET);
}
}
/* Start DS18B20 */
void DS18B20_Start(void)
{
HAL_GPIO_WritePin(PA3_GPIO_Port, PA3_Pin, GPIO_PIN_RESET);
delay_us(480);
HAL_GPIO_WritePin(PA3_GPIO_Port, PA3_Pin, GPIO_PIN_SET);
delay_us(80);
HAL_GPIO_WritePin(PA3_GPIO_Port, PA3_Pin, GPIO_PIN_RESET);
delay_us(480);
}
/* Delay for us microseconds */
void delay_us(uint32_t us)
{
__HAL_TIM_SET_COUNTER(&htim3, 0);
while ((__HAL_TIM_GET_COUNTER(&htim3)) < us);
}
/* GPIO and UART initialization functions */
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/* Configure GPIO pin : KEY4_Pin */
GPIO_InitStruct.Pin = KEY4_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(KEY4_GPIO_Port, &GPIO_InitStruct);
/* Configure GPIO pin : PA3_Pin */
GPIO_InitStruct.Pin = PA3_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(PA3_GPIO_Port, &GPIO_InitStruct);
HAL_GPIO_WritePin(PA3_GPIO_Port, PA3_Pin, GPIO_PIN_SET);
}
static void MX_USART3_UART_Init(void)
{
huart3.Instance = USART3;
huart3.Init.BaudRate = 115200;
huart3.Init.WordLength = UART_WORDLENGTH_8B;
huart3.Init.StopBits = UART_STOPBITS_1;
huart3.Init.Parity = UART_PARITY_NONE;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart3) != HAL_OK)
{
Error_Handler();
}
}
static void MX_TIM3_Init(void)
{
htim3.Instance = TIM3;
htim3.Init.Prescaler = ((SystemCoreClock / 1000000) * 1) - 1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 0xFFFF;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
}
void Error_Handler(void)
{
while (1);
}
#ifdef USE_FULL_ASSERT
void assert_failed(uint8_t *file, uint32_t line)
{
}
#endif /* USE_FULL_ASSERT */
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 7;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK
| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
```
阅读全文
相关推荐
最新推荐
python通过pil模块将raw图片转换成png图片的方法
在示例代码中,首先打开名为"foo.raw"的文件并以二进制模式('rb')读取其内容,存储在变量`rawData`中。接着,定义图像的尺寸`imgSize`,然后使用`Image.fromstring()`函数创建一个新的`Image`对象。在这个例子中,...
python 使用raw socket进行TCP SYN扫描实例
Python中的Raw Socket编程主要用于底层网络通信,它允许程序员直接操作TCP/IP协议栈,而不依赖于操作系统提供的高级接口。在网络安全领域,尤其是端口扫描技术中,Raw Socket常常被用来实现自定义的网络通信行为,...
移动硬盘H盘损坏文件系统变成RAW的数据恢复方法
"移动硬盘H盘损坏文件系统变成RAW的数据恢复方法" 在计算机存储设备中,文件系统是非常重要的一部分,它负责管理和组织数据的存储和检索。但是,随着时间的推移和使用的频率,文件系统可能会出现损坏的情况,导致...
RAW CR2文件完全解析
RAW CR2文件完全解析 RAW CR2文件格式是由佳能(Canon)公司设计的一种 RAW 图像文件格式,用于保存数字相机拍摄的图像数据。该格式结合了TIFF(Tagged Image File Format)和EXIF(Exchangeable Image File Format...
Python 实现Serial 与STM32J进行串口通讯
作者使用STM32F103作为下位机,通过一个多小时的调试就成功实现了通信,突显了Python在这一领域的实用性。在Windows环境下,Python中的串口号通常以COM表示,并且从1开始编号,但如果是程序中直接指定,序号则从0...
磁性吸附笔筒设计创新,行业文档精选
资源摘要信息:"行业文档-设计装置-一种具有磁性吸附功能的笔筒.zip"
知识点一:磁性吸附原理
磁性吸附功能依赖于磁铁的性质,即磁铁可以吸引铁磁性物质。磁性吸附笔筒的设计通常会内置一个或多个小磁铁。当笔具接近笔筒表面时,磁铁会对笔具产生吸附力,从而实现笔具的稳固吸附。这种吸附力可以有效地防止笔具无意中掉落或丢失。
知识点二:磁性材料的选择
在设计这种笔筒时,需要选择合适的磁性材料。常见的磁性材料有铁氧体、钕铁硼、铝镍钴等。不同材料的磁性强度、耐腐蚀性能及成本各不相同,设计师需要根据产品性能需求和成本预算来选择合适的磁性材料。
知识点三:笔筒设计
具有磁性吸附功能的笔筒在设计时要考虑到美观性和实用性。设计师通常会根据人体工程学原则设计笔筒的形状和尺寸,确保笔筒不仅能够稳固吸附笔具,还能方便用户取用。同时,为了提高产品的外观质感,可能会采用金属、塑料、木材等多种材料进行复合设计。
知识点四:磁力大小的控制
在设计磁性吸附笔筒时,控制磁力大小是一个重要方面。磁力需要足够强大,以确保笔具能够稳固吸附在笔筒上,但又不能过于强大以至于用户取用笔具时感到困难。设计时可能需要通过调整磁铁大小、形状和位置来控制吸附力。
知识点五:安全性和环保性
设计具有磁性吸附功能的笔筒还要考虑产品的安全性。磁铁尤其是强力磁铁可能对儿童存在安全隐患,如误吞等情况。因此设计时需要考虑防止儿童接触磁铁的可能性。此外,环保设计也十分必要,需要选择对环境影响小的材料,确保产品在使用周期结束后可以被回收或分解。
知识点六:文档规范性
文件名称为“一种具有磁性吸附功能的笔筒.pdf”,表明该设计装置的相关文档遵循了行业标准和规范,文档格式为PDF,这种格式广泛用于各种正式的文档记录和设计图纸,便于查看和打印,且不易被篡改。
知识点七:专利和知识产权保护
从标题中的“行业文档-设计装置”可以推测,该笔筒设计可能涉及专利申请。在设计具有磁性吸附功能的笔筒时,设计师或设计公司应当确保其创新点得到保护,避免设计被未经授权的第三方使用。这通常需要提交专利申请,以及在设计图纸、产品制造和销售等各个环节保护知识产权。
知识点八:实用性与市场需求
在设计创新产品时,除了技术实现外,还必须考虑市场需求。具有磁性吸附功能的笔筒能否满足用户需求,是否具有实用价值,以及用户是否愿意为此功能支付额外费用都是产品能否成功的决定因素。设计师需要进行市场调研,了解目标用户群体的需求,以便设计出符合市场的产品。
以上是对“行业文档-设计装置-一种具有磁性吸附功能的笔筒.zip”文件内容的深入解析,涵盖了磁性吸附原理、磁性材料选择、笔筒设计、磁力控制、安全性与环保性、文档规范性、知识产权保护以及市场需求等多个方面的知识点。通过对这些方面的了解,可以对该笔筒的设计概念和技术实现有一个全面的认识。
管理建模和仿真的文件
管理Boualem Benatallah引用此版本:布阿利姆·贝纳塔拉。管理建模和仿真。约瑟夫-傅立叶大学-格勒诺布尔第一大学,1996年。法语。NNT:电话:00345357HAL ID:电话:00345357https://theses.hal.science/tel-003453572008年12月9日提交HAL是一个多学科的开放存取档案馆,用于存放和传播科学研究论文,无论它们是否被公开。论文可以来自法国或国外的教学和研究机构,也可以来自公共或私人研究中心。L’archive ouverte pluridisciplinaire
深入LINQ:泛型在查询表达式中的强大应用
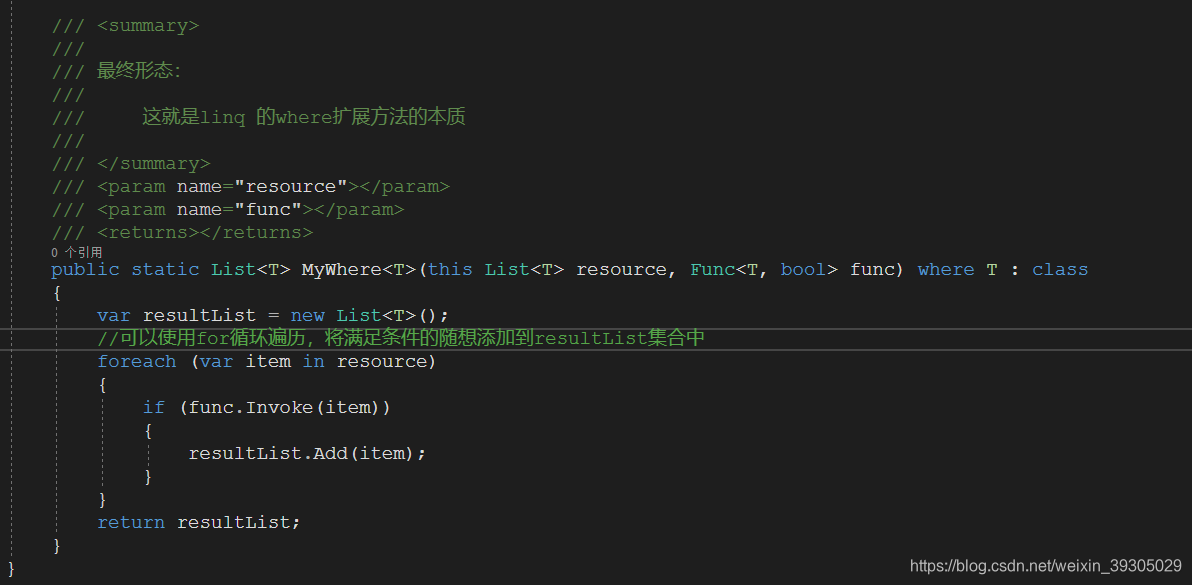
# 1. LINQ简介和泛型基础
LINQ(Language Integrated Query,语言集成查询)是.NET框架中用于提供一致的数据查询功能的编程模型。它可
在Java中,当人数 为M ,我们需要按照给定的比例来分配人数到不同的等级(M*10%为A,M*20%为B,M*50%为C,M*10%为D,M*10%为E)
在Java中,为了根据给定的比例将人数M分配到五个等级(A、B、C、D和E),你可以创建一个循环来迭代每个级别。首先定义每个级别的阈值,然后计算对应的人数。这里是一个简单的示例:
```java
public class PopulationDistribution {
public static void main(String[] args) {
int totalPeople = M; // 你需要替换为实际的人数
double ratio[] = {0.10, 0.20, 0.50, 0.10, 0.10}; // 比例数组
S
Java Swing实现的俄罗斯方块游戏代码分享
资源摘要信息: "俄罗斯方块游戏-Java-Swing实现.zip"
### 标题分析
标题中提到的“俄罗斯方块游戏”是一种经典的电子游戏,玩家需要操作不断下落的各种形状的方块,使它们在底部拼成完整的一行或多行,从而消除这些行并获得分数。而“Java-Swing实现”表明该游戏是用Java编程语言中的Swing图形用户界面工具包来编写的。Swing是Java的一部分,用于创建图形用户界面。
### 描述分析
描述部分重复出现了文件名,这可能是由于某种错误导致的重复信息,并没有提供额外的知识点。因此,我们主要根据标题来提取相关的知识点。
### 标签分析
标签“游戏”和“java”说明该资源与游戏开发领域相关,特别是使用Java语言开发的游戏。标签帮助我们定位到资源的用途和相关技术。
### 压缩包子文件的文件名称列表分析
文件名“project_code_0628”暗示这可能是项目的源代码文件,日期“0628”可能是项目的某个版本或建立的日期。
### 知识点详细说明
#### 1. 俄罗斯方块游戏规则
- 俄罗斯方块游戏的基本规则是通过移动、旋转和放置一系列不同形状的方块,使它们在游戏区域内形成完整的水平线。
- 完整的水平线会消失并为玩家加分,而未能及时消除的方块会堆积起来,一旦堆积到顶部,游戏结束。
#### 2. Java编程语言基础
- Java是一种广泛使用的面向对象的编程语言,具有跨平台的特性。
- Java的核心概念包括类、对象、继承、封装、多态等,这些都是实现俄罗斯方块游戏的基础。
#### 3. Java Swing图形用户界面
- Swing是Java的一个GUI工具包,它允许开发者构建具有窗口、按钮、文本框等组件的图形用户界面。
- 使用Swing,开发者可以实现窗口的各种交互,如监听鼠标和键盘事件,响应用户操作。
#### 4. 游戏逻辑实现
- 在编写俄罗斯方块游戏的Java代码时,需要实现核心的游戏逻辑,如方块的生成、移动、旋转和消除。
- 游戏逻辑可能涉及到数组或列表的数据结构来存储和操作游戏区域内的方块状态。
#### 5. 游戏循环与渲染
- 游戏循环是游戏运行的核心,负责更新游戏状态并重新绘制界面。
- 在Swing中,游戏循环通常通过定时器(例如`javax.swing.Timer`)来实现,定时触发游戏状态的更新和界面的重绘。
#### 6. 事件处理
- 事件处理是响应用户操作(如按键、鼠标点击)的机制。
- 在Swing中,可以为不同的组件添加事件监听器来处理各种事件。
#### 7. 游戏优化与性能
- 对于游戏来说,性能优化是一个重要方面,特别是对于动态的图形界面。
- 优化可能涉及减少不必要的界面刷新,优化数据结构,以及合理利用Swing的线程模型来避免界面阻塞。
#### 8. 可扩展性和模块化
- 在设计游戏代码时,考虑代码的可扩展性和模块化是非常重要的。
- 通过将游戏的不同部分(如游戏逻辑、用户界面、数据存储等)分离到不同的类或模块中,可以更容易地管理和维护代码。
#### 9. 资源管理
- 游戏开发中,资源管理是一个关键点,包括图像、音效等媒体资源的加载和使用。
- 在Swing中,资源通常通过类加载器来管理,并确保在需要时加载,在不使用时释放。
#### 10. 测试与调试
- 游戏开发过程中,测试和调试是确保游戏质量的重要步骤。
- 使用Java的调试工具和单元测试框架,如JUnit,可以帮助开发者在开发过程中发现和修复问题。
总结来说,通过分析标题、描述、标签和文件名称列表,我们可以提取出关于如何使用Java Swing实现俄罗斯方块游戏的一系列知识点,涉及游戏开发的各个方面,从基本规则、编程语言基础、图形用户界面设计、游戏逻辑实现,到性能优化、资源管理等。这些知识点对于想要了解或参与Java图形界面游戏开发的开发者来说非常有用。