ilocate = ((float)(b_gamma[i] << 2) / 256.0) * spaceY; BYTE b_gamma[],这段代码会存在算数溢出问题吗
时间: 2024-09-13 13:16:54 浏览: 15
这段代码涉及到位移操作、类型转换和算数运算。为了评估是否存在算术溢出的风险,我们需要详细分析这些操作。给定的代码片段如下:
```c
ilocate = ((float)(b_gamma[i] << 2) / 256.0) * spaceY;
```
这里 `b_gamma[i]` 是一个 `BYTE` 类型的变量,通常在 C/C++ 中 `BYTE` 对应于 `unsigned char`,这意味着它的取值范围是 0 到 255。接下来的操作是将 `b_gamma[i]` 左移两位 (`<< 2`),这等价于将 `b_gamma[i]` 值乘以 4。由于 `b_gamma[i]` 的最大值是 255,左移两位后的结果最大为 `255 * 4 = 1020`。
然后将这个结果转换为 `float` 类型,并除以 `256.0`。由于 `float` 类型可以容纳的数值范围远大于 `255 * 4`,所以这个除法操作不会导致溢出。最后,将这个结果乘以 `spaceY`,这里没有给出 `spaceY` 的类型和范围,所以无法确定乘法是否会溢出,除非知道 `spaceY` 的确切值和类型。
总之,就 `b_gamma[i]` 这部分而言,不会出现算术溢出。但是,是否溢出还依赖于 `spaceY` 的值和类型。如果 `spaceY` 的值足够大,那么乘以 `spaceY` 有可能导致溢出。为确保安全,我们需要检查 `spaceY` 的值,确保结果在 `float` 类型可以表示的范围内。
相关问题
f = 1e6:1e5:100e6; r=3.9904e-3; D=15.8e-3; delta = sqrt(1./pi./f./mu_c./sigma_c); R_solid = 1./pi./r./delta./sigma_c; R = (D./2./r)./sqrt((D./2./r).^2-1).*R_solid; Ls = R./2./pi./f; Lm = mu_c/pi*acosh(D/2/r); L = Ls+Lm; C = pi*epslon/acosh(D/2/r); G = 2.*pi.*f.*C.*tdelta; temp_a = complex(R, 2.*pi.*f.*L); temp_b = complex(G, 2.*pi.*f.*C); gama = sqrt(temp_a.*temp_b);如何计算
这段代码的计算过程如下:
1. 定义频率$f$为从$1\times10^6$到$100\times10^6$,步长为$1\times10^5$的等差数列。
2. 定义导体半径$r=3.9904\times10^{-3}$,导体直径$D=15.8\times10^{-3}$。
3. 计算电磁波在导体中的衰减深度$\delta = \sqrt{\frac{1}{\pi f \mu_c \sigma_c}}$,其中$\mu_c$和$\sigma_c$分别为导体的磁导率和电导率。
4. 计算导体电阻率$\rho_c = \frac{1}{\sigma_c}$,以及导体电阻率和衰减深度的乘积$R_{solid} = \frac{1}{\pi r \delta \sigma_c}$。
5. 计算导体表面电阻$R = \frac{D}{2r} \cdot \frac{R_{solid}}{\sqrt{\left(\frac{D}{2r}\right)^2-1}}$。
6. 计算线圈自感$L_s = \frac{R}{2\pi f}$。
7. 计算线圈互感$L_m = \frac{\mu_c}{\pi} \cdot \text{acosh}\left(\frac{D}{2r}\right)$。
8. 计算线圈总感应$L = L_s + L_m$。
9. 计算线圈电容$C = \frac{\pi \epsilon}{\text{acosh}\left(\frac{D}{2r}\right)}$,其中$\epsilon$为介质常数。
10. 计算线圈电导$G = 2\pi f C \delta$。
11. 计算传输常数$\gamma = \sqrt{(R + 2\pi f L i)\cdot(G + 2\pi f C i)}$,其中$i$为虚数单位。
解释代码def gen_PSD(p_obj): N = 2 * p_obj['N'] smax = p_obj['delta0'] / p_obj['D'] * N c1 = 2 * ((24 / 5) * gamma(6 / 5)) ** (5 / 6) c2 = 4 * c1 / np.pi * (gamma(11 / 6)) ** 2 s_arr = np.linspace(0, smax, N) I0_arr = np.float32(s_arr * 0) I2_arr = np.float32(s_arr * 0) for i in range(len(s_arr)): I0_arr[i] = I0(s_arr[i]) I2_arr[i] = I2(s_arr[i]) i, j = np.int32(N / 2), np.int32(N / 2) [x, y] = np.meshgrid(np.arange(1, N + 0.01, 1), np.arange(1, N + 0.01, 1)) s = np.sqrt((x - i) ** 2 + (y - j) ** 2) C = (In_m(s, p_obj['delta0'] / p_obj['D'] * N , I0_arr) + In_m(s, p_obj['delta0'] / p_obj['D'] * N, I2_arr)) / I0(0) C[round(N / 2), round(N / 2)] = 1 C = C * I0(0) * c2 * (p_obj['Dr0']) ** (5 / 3) / (2 ** (5 / 3)) * (2 * p_obj['wvl'] / (np.pi * p_obj['D'])) ** 2 * 2 * np.pi Cfft = np.fft.fft2(C) S_half = np.sqrt(Cfft) S_half_max = np.max(np.max(np.abs(S_half))) S_half[np.abs(S_half) < 0.0001 * S_half_max] = 0 return S_half
这段代码是用来生成干涉仪的功率谱密度(PSD)的。在干涉仪中,PSD可以用来描述干涉图案中的空间频率分布,其中包含了干涉仪的性能特征。具体的实现细节如下:
- N = 2 * p_obj['N']:设置矩阵的大小为2N x 2N。
- smax = p_obj['delta0'] / p_obj['D'] * N:计算最大的空间频率。
- c1和c2是常数,用于计算PSD的值。
- s_arr = np.linspace(0, smax, N):在0到smax之间生成N个等差数列,用于计算I0_arr和I2_arr。
- I0_arr和I2_arr是一维数组,用于存储零阶和二阶贝塞尔函数的值。
- for循环用于计算I0_arr和I2_arr中每个元素的值。
- i, j = np.int32(N / 2), np.int32(N / 2):计算中心像素的位置。
- [x, y] = np.meshgrid(np.arange(1, N + 0.01, 1), np.arange(1, N + 0.01, 1)):生成网格矩阵,用于计算每个像素点的位置和距离中心像素的距离。
- s = np.sqrt((x - i) ** 2 + (y - j) ** 2):计算每个像素点距离中心像素的距离。
- C = (In_m(s, p_obj['delta0'] / p_obj['D'] * N , I0_arr) + In_m(s, p_obj['delta0'] / p_obj['D'] * N, I2_arr)) / I0(0):计算每个像素点的PSD值。
- C[round(N / 2), round(N / 2)] = 1:设置中心像素的PSD值为1。
- C = C * I0(0) * c2 * (p_obj['Dr0']) ** (5 / 3) / (2 ** (5 / 3)) * (2 * p_obj['wvl'] / (np.pi * p_obj['D'])) ** 2 * 2 * np.pi:根据计算公式计算每个像素点的PSD值。
- Cfft = np.fft.fft2(C):进行二维傅里叶变换,得到复数矩阵。
- S_half = np.sqrt(Cfft):计算功率谱密度的平方根,得到实数矩阵。
- S_half_max = np.max(np.max(np.abs(S_half))):计算S_half矩阵中的最大值。
- S_half[np.abs(S_half) < 0.0001 * S_half_max] = 0:将小于阈值的值设置为0。
- 返回S_half矩阵。
相关推荐
最新推荐
DRM_LCM_Porting_Guide_DSI_V1.0.pdf
2. **配置项目Makefile**:接着,在特定项目的Makefile(如`alps\bootable\bootloader\lk\project\<project>.mk`)中添加LCM配置。如果有多款LCM,需要在`CONFIG_CUSTOM_LK_LCM`变量中用空格分隔;如果是单一LCM,则...
ExtJS 2.0 入门教程与开发指南
"EXTJS开发指南,适用于初学者,涵盖Ext组件和核心技术,可用于.Net、Java、PHP等后端开发的前端Ajax框架。教程包括入门、组件结构、控件使用等,基于ExtJS2.0。提供有配套的单用户Blog系统源码以供实践学习。作者还编写了更详细的《ExtJS实用开发指南》,包含控件配置、服务器集成等,面向进阶学习者。"
EXTJS是一个强大的JavaScript库,专门用于构建富客户端的Web应用程序。它以其丰富的组件和直观的API而闻名,能够创建具有桌面应用般用户体验的Web界面。在本文档中,我们将深入探讨EXTJS的核心技术和组件,帮助初学者快速上手。
首先,EXTJS的组件模型是其强大功能的基础。它包括各种各样的控件,如窗口(Window)、面板(Panel)、表格(Grid)、表单(Form)、菜单(Menu)等,这些组件可以灵活组合,构建出复杂的用户界面。通过理解这些组件的属性、方法和事件,开发者可以定制化界面以满足特定需求。
入门EXTJS,你需要了解基本的HTML和JavaScript知识。EXTJS的API文档是学习的重要资源,它详细解释了每个组件的功能和用法。此外,通过实际操作和编写代码,你会更快地掌握EXTJS的精髓。本教程中,作者提供了新手入门指导,包括如何设置开发环境,创建第一个EXTJS应用等。
EXTJS的组件体系结构是基于MVC(Model-View-Controller)模式的,这使得代码组织清晰,易于维护。学习如何构建和组织这些组件,对于理解EXTJS的工作原理至关重要。同时,EXTJS提供了数据绑定机制,可以方便地将视图组件与数据源连接,实现数据的实时更新。
在EXTJS中,控件的使用是关键。例如,表格控件(GridPanel)可以显示大量数据,支持排序、过滤和分页;表单控件(FormPanel)用于用户输入,可以验证数据并发送到服务器。每个控件都有详细的配置选项,通过调整这些选项,可以实现各种自定义效果。
此外,EXTJS与服务器端的集成是另一个重要话题。无论你的后端是.NET、Java还是PHP,EXTJS都能通过Ajax通信进行数据交换。了解如何使用Store和Proxy来处理数据请求和响应,是构建交互式应用的关键。
为了深化EXTJS的学习,你可以参考作者编写的《ExtJS实用开发指南》。这本书更深入地讲解了EXTJS框架,包括控件的详细配置、服务器集成示例以及一个完整应用系统的构建过程,适合已经掌握了EXTJS基础并希望进一步提升技能的开发者。
EXTJS是一个强大的工具,能够帮助开发者构建功能丰富、用户体验优秀的Web应用。通过本文档提供的教程和配套资源,初学者可以逐步掌握EXTJS,从而踏入这个充满可能的世界。在实践中不断学习和探索,你将能驾驭EXTJS,创造出自己的富客户端应用。
管理建模和仿真的文件
管理Boualem Benatallah引用此版本:布阿利姆·贝纳塔拉。管理建模和仿真。约瑟夫-傅立叶大学-格勒诺布尔第一大学,1996年。法语。NNT:电话:00345357HAL ID:电话:00345357https://theses.hal.science/tel-003453572008年12月9日提交HAL是一个多学科的开放存取档案馆,用于存放和传播科学研究论文,无论它们是否被公开。论文可以来自法国或国外的教学和研究机构,也可以来自公共或私人研究中心。L’archive ouverte pluridisciplinaire
【Java字符串不可变性深度剖析】:影响与应用场景分析
# 1. Java字符串不可变性的基本概念
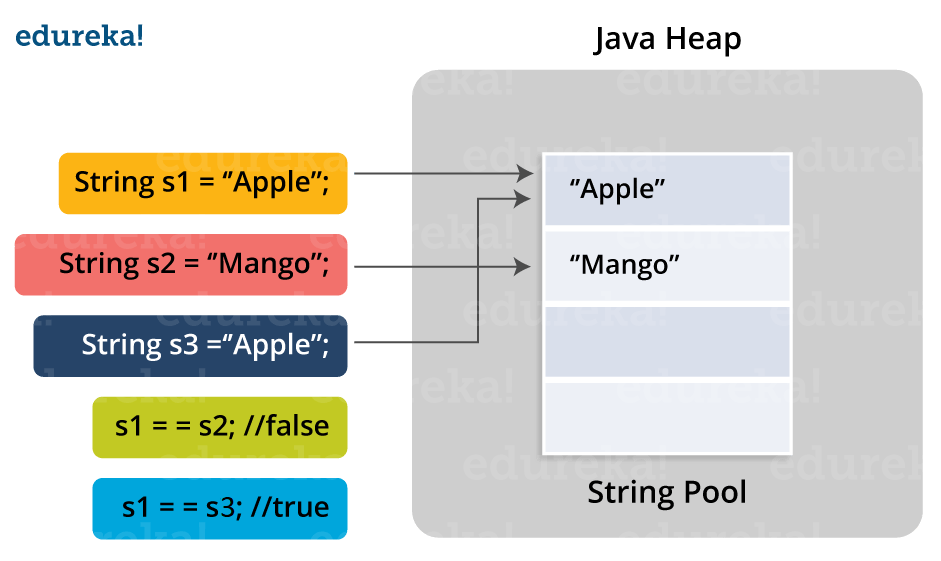
Java字符串的不可变性指的是一个字符串对象一旦被创建,其内部的字符序列就不能被改变。这意味着任何对字符串的修改操作,如更改字符、拼接、截取等,都不会影响原始字符串对象,而是会生成一个新的字符串对象。不可变性是Java中String类的一个核心特性,它为Java语言带来了多方面的积极影响,比如线程安全、高效的字符串池管理等。然而,这一特性也并
如何让一个字符串等于一个字符数组
要让一个字符串等于一个字符数组,你可以直接赋值,假设我们有一个字符数组`char strArray[]`和一个字符串`char* myString`,你可以这样做:
```c
// 字符数组初始化
char strArray[] = "Hello, World!";
// 将字符串字面量赋给myString
char* myString = strArray;
// 或者如果你想要创建动态分配的字符串并且需要手动添加终止符'\0',
// 可以使用strcpy()函数
size_t len = strlen(strArray); // 获取字符串长度
myString = (char*)
基于TMS320F2812的能量回馈调速系统设计
"基于TMS320F2812的能量回馈调速系统的研发,涉及硬件电路设计、软件设计及Matlab仿真,是理解能量回馈技术的重要资料。"
本文详细探讨了基于TI公司的TMS320F2812 DSP芯片实现的能量回馈调速系统。TMS320F2812是一款高性能的数字信号处理器,适用于实时控制应用,其内置的双事件管理器功能使得双PWM控制得以高效实现,降低了硬件成本并支持复杂控制算法。
在能量回馈的基本原理上,传统的能耗制动方法在变频调速中存在能源浪费、电阻过热以及无法在四象限运行等问题。能量回馈技术则解决了这些问题,它允许变频器在所有四个象限运行,并通过控制整流器和逆变器之间的功率平衡,减小直流储能电容的需求。此外,制动能量被送回电网,提高了系统的整体效率,同时不会对电网质量造成负面影响。
文章首先介绍了能量回馈调速系统的硬件电路设计。主电路采用了两电平电压型双PWM变换器架构,包含网侧电抗器、PWM整流器、直流环节和PWM逆变器。PWM整流器在电机减速时将电机产生的机械能转化为电能,并通过逆变器将其反馈到电网。直流母线电压检测、电流检测、同步电路和温度检测电路等辅助电路确保了系统稳定运行和安全。
接下来,文章阐述了系统的控制策略和软件设计。通过DSP芯片,可以执行实时的控制算法,实现精确的电压和电流控制,确保能量有效回馈。软件设计包括了对电机状态的监控、PWM信号的生成以及各种保护机制的编程。
最后,作者进行了Matlab仿真实验,通过仿真波形验证了设计的有效性。实验结果表明,基于TMS320F2812的系统能够实现能量回馈,且动态性能良好。尽管国际上已有类似的四象限运行变频器和再生装置,但考虑到价格和电网适应性,本设计提供了更经济、更适合中国国情的解决方案。
这篇文章为读者提供了一个深入理解能量回馈技术以及如何利用TMS320F2812 DSP实现这一技术的实例,对于从事相关领域的工程师和技术人员来说,是一份有价值的参考资料。
"互动学习:行动中的多样性与论文攻读经历"
多样性她- 事实上SCI NCES你的时间表ECOLEDO C Tora SC和NCESPOUR l’Ingén学习互动,互动学习以行动为中心的强化学习学会互动,互动学习,以行动为中心的强化学习计算机科学博士论文于2021年9月28日在Villeneuve d'Asq公开支持马修·瑟林评审团主席法布里斯·勒菲弗尔阿维尼翁大学教授论文指导奥利维尔·皮耶昆谷歌研究教授:智囊团论文联合主任菲利普·普雷教授,大学。里尔/CRISTAL/因里亚报告员奥利维耶·西格德索邦大学报告员卢多维奇·德诺耶教授,Facebook /索邦大学审查员越南圣迈IMT Atlantic高级讲师邀请弗洛里安·斯特鲁布博士,Deepmind对于那些及时看到自己错误的人...3谢谢你首先,我要感谢我的两位博士生导师Olivier和Philippe。奥利维尔,"站在巨人的肩膀上"这句话对你来说完全有意义了。从科学上讲,你知道在这篇论文的(许多)错误中,你是我可以依
【Java字符串编码问题】:如何解决乱码,保证数据一致性

# 1. Java字符串编码基础
## 1.1 字符串编码的重要性
在 Java 编程中,字符串的正确处理对于数据的准确性和一致性至关重要。随着应用
通过PHP中提供的while循环语句和递增递减运算符来实现菱形金字塔
在PHP中,可以利用while循环和递增递减运算符来创建菱形金字塔,这是一种常见的控制结构和算术操作结合的应用实例。以下是一个简单的示例,展示如何生成一个向上对齐的小型菱形:
```php
<?php
$height = 5; // 菱形的高度
// 上半部分三角形
$i = 1;
while ($i <= $height) {
for ($j = $height - $i; $j >= 0; $j--) {
echo " ";
}
for ($k = 0; $k < 2 * $i - 1; $k++) {
echo "*";
SIP协议详解:RFC3261与即时消息RFC3428
"即时消息 SIP协议 RFC3261 中文"
即时消息协议在现代通信系统中扮演着关键角色,特别是SIP(Session Initiation Protocol)作为应用层的控制协议,被广泛应用于建立、管理和终止多媒体会话,如互联网电话、视频会议等。SIP协议的强大之处在于它不仅能够创建新会话,还能够邀请参与者加入已有的会话,并且能够方便地添加或删除媒体流。此外,SIP支持名字映射和重定向服务,确保用户可以在不同网络位置使用相同的标识进行通信。
RFC3261是SIP协议的官方规范,详细定义了SIP的工作流程和消息格式。RFC3428则专门讨论了SIP即时消息的实现,它扩展了SIP的功能,使得用户可以通过SIP发送和接收即时消息。
SIP协议的结构主要包括请求和响应两种消息类型。请求消息用于发起会话操作,如INVITE用于发起呼叫,ACK确认收到响应,CANCEL用于取消请求。响应消息则表示对请求的回应,分为2xx成功类、3xx重定向类、4xx客户端错误类、5xx服务器错误类和6xx全局错误类。每条消息都包含头域和可能的消息正文,头域包括如Request-URI、To、From、Call-ID、CSeq、Max-Forwards、Via、Contact等关键字段,它们各自负责标识、路由、计数和会话管理等功能。
在SIP消息处理中,用户代理(UA)分为用户代理客户端(UAC)和用户代理服务器(UAS)。UAC负责发起请求,设置请求头字段,并根据收到的响应执行相应的操作,如处理重定向、错误响应等。UAS则负责接收请求,解析方法和头域,生成响应,同时可能需要处理内容和执行扩展功能。重定向服务器用于将请求转发到正确的目的地。
取消请求(Cancel)是SIP中的一个重要机制,它允许用户取消尚未完成的请求,避免不必要的资源消耗。注册(Registrations)则是用户向SIP服务器声明其可达性,以便其他用户可以找到并联系他们。注册过程涉及注册请求的构造、绑定的添加和更新等操作。
SIP协议的灵活性和可扩展性使其成为VoIP和多媒体通信领域的重要标准,而RFC3261和RFC3428为开发者提供了详尽的指导,帮助实现高效、可靠的即时消息和会话控制服务。通过理解并掌握这些规范,开发者可以构建符合标准的SIP应用,为用户提供高质量的通信体验。