C++11并发编程详解:多线程与原子操作的最佳实践
发布时间: 2024-10-22 07:28:51 阅读量: 1 订阅数: 3 
# 1. C++11并发编程概述
现代软件开发正日益朝着并行化和分布式的方向发展。随着多核处理器的普及,将任务有效地分解为可并行执行的单元,不仅能够提升程序的性能,还能增强用户体验。C++11标准的引入,为开发者提供了新的并发编程工具,从而使多线程编程变得更加直接和安全。本章将带领读者入门并发编程的世界,理解C++11并发编程的基础知识,包括并发与并行的区别、并发编程的基本概念以及C++11在并发编程方面所做出的改进。为后续章节中对C++11并发特性的详细介绍打下坚实基础。
# 2. C++11多线程编程基础
## 2.1 线程的创建与管理
### 2.1.1 std::thread的使用
在C++11中,std::thread是实现线程创建和管理的核心类。它提供了简单且直接的方式来创建线程,并允许程序员对这些线程进行精细的控制。std::thread类定义在头文件<thread>中。创建线程通常涉及将一个可调用对象(如函数、lambda表达式或函数对象)传递给std::thread构造函数。下面是一个创建线程的简单例子:
```cpp
#include <iostream>
#include <thread>
void threadFunction() {
std::cout << "Thread function is executing" << std::endl;
}
int main() {
std::thread myThread(threadFunction);
myThread.join();
std::cout << "Main function is returning" << std::endl;
return 0;
}
```
在这段代码中,我们首先包含了必要的头文件,然后定义了一个简单的线程函数`threadFunction`。在`main`函数中,我们创建了一个`std::thread`对象`myThread`,并将`threadFunction`作为参数传递给它。调用`myThread.join()`是为了等待线程完成执行。`join`方法的作用是阻塞调用它的线程(这里是主线程),直到与`myThread`关联的线程执行完成。
### 2.1.2 线程的启动、等待与分离
std::thread提供了几个成员函数,用于管理线程的启动、等待和分离状态。以下是几个常用的操作:
- `join()`: 等待线程结束。如果线程已经结束,`join`会立即返回。如果线程还未结束,当前调用`join`的线程会等待,直到线程结束。
- `detach()`: 允许线程独立运行,即让线程在后台自行运行。当一个线程被分离后,调用线程将放弃对它的所有权,线程的资源在它执行完毕后会自动释放。
- `get_id()`: 返回线程对象所代表线程的线程标识符。如果线程还未启动或者已结束,则返回一个默认构造的thread::id对象。
```cpp
#include <iostream>
#include <thread>
void threadFunction(int n) {
std::cout << "Thread: " << n << std::endl;
}
int main() {
std::thread myThread(threadFunction, 1); // Start the thread and pass 1 as argument
// myThread.join(); // Uncomment this to wait for thread to finish
// myThread.detach(); // Uncomment this to let thread run independently
std::thread myOtherThread(threadFunction, 2); // Start another thread
myOtherThread.join(); // Wait for the second thread to finish
std::cout << "All threads finished" << std::endl;
return 0;
}
```
在这段代码中,我们创建了两个线程。第一个线程`myThread`会打印数字1,并且调用了`detach()`方法来让线程独立运行。第二个线程`myOtherThread`打印数字2,并且我们使用了`join()`方法来确保主线程会等待这个线程执行完毕。注意,注释掉的`myThread.join()`和`myThread.detach()`展示了另一种可能的处理方式。
## 2.2 线程同步机制
### 2.2.1 互斥锁mutex
在多线程环境中,资源的共享访问会导致竞争条件,可能会出现数据不一致的问题。互斥锁是一种同步机制,确保在任一时刻只有一个线程可以访问共享资源。C++11通过`<mutex>`头文件提供了几种不同类型的互斥锁:
- `std::mutex`: 基本的互斥锁,提供了基本的锁定功能。
- `std::recursive_mutex`: 允许一个线程多次获得锁。
- `std::timed_mutex`: 一个具有超时特性的互斥锁,支持尝试加锁操作。
- `std::recursive_timed_mutex`: 结合了递归和超时特性。
使用`std::mutex`的基本方法是通过创建一个`std::mutex`实例,并在需要保护的代码区域前后使用`lock`和`unlock`方法。然而,更好的做法是使用RAII(资源获取即初始化)习惯,这通过`std::lock_guard`或`std::unique_lock`来实现。
```cpp
#include <iostream>
#include <thread>
#include <mutex>
std::mutex mtx;
void printId(int id) {
mtx.lock();
std::cout << "Thread " << id << std::endl;
mtx.unlock();
}
int main() {
std::thread threads[10];
for (int i = 0; i < 10; ++i) {
threads[i] = std::thread(printId, i);
}
for (auto& th : threads) {
th.join();
}
return 0;
}
```
上面的代码创建了10个线程,每个线程都尝试访问并打印其ID。为了保护`std::cout`对象不被多个线程同时访问,我们使用了`std::mutex`。当`printId`函数被调用时,`std::lock_guard`的构造函数会自动调用`mtx.lock()`来获取锁,并在`std::lock_guard`对象被销毁时自动调用`unlock()`来释放锁。这确保了即使在异常抛出的情况下,锁也总是被释放。
## 2.3 线程的高级特性
### 2.3.1 线程局部存储(thread_local)
`thread_local`是C++11提供的线程存储类说明符,它声明的变量拥有线程存储期,意味着每个线程都会拥有该变量的一个独立实例。这允许我们在不同线程中有相同的变量名,但每个变量是独立的。这种特性对于实现线程安全的日志记录器、随机数生成器等场景非常有用。
```cpp
#include <iostream>
#include <thread>
thread_local int threadId = 0;
void setThreadId() {
threadId = std::this_thread::get_id();
}
void printThreadId() {
std::cout << "Thread ID: " << threadId << std::endl;
}
int main() {
std::thread t1(printThreadId);
std::thread t2(printThreadId);
setThreadId(); // Set the thread ID for the main thread
printThreadId();
t1.join();
t2.join();
return 0;
}
```
在这段代码中,`threadId`是一个`thread_local`变量,每个线程都有自己的`threadId`副本。函数`setThreadId`设置了当前线程的`threadId`,而`printThreadId`打印当前线程的`threadId`。即使主线程和两个子线程都调用了相同的函数,由于`threadId`是`thread_local`的,它们会打印不同的线程ID。
在介绍完C++11中多线程编程的基础知识后,接下来我们将深入探讨线程同步机制的其他方面,以及线程的高级特性,以进一步提高并发程序的健壮性和效率。
# 3. C++11原子操作详解
在现代多核处理器中,原子操作是实现高效、线程安全程序的基础。C++11标准库提供了强大的原子操作支持,使得开发者可以在并发环境中安全地更新和访问共享数据。本章将深入探讨C++11中的原子操作,包括它们的基础用法、高级用法以及在并发算法中的应用。
## 3.1 原子类型和操作基础
### 3.1.1 atomic基本用法
原子操作指的是不可分割的操作,这些操作要么完整地执行,要么完全不执行,没有任何中间状态。在C++11中,`<atomic>`头文件提供了`std::atomic`模板类,用来表示可以进行原子操作的类型。下面是一个使用`std::atomic`的简单示例:
```cpp
#include <atomic>
#include <iostream>
int main() {
std::atomic<int> atomic_value(0);
atomic_value.fetch_add(1); // 原子地增加atomic_value的值
std::cout << atomic_value.load() << std::endl; // 原子地获取atomic_value的值
return 0;
}
```
在这段代码中,`std::atomic<int>`对象`atomic_value`被创建,并初始化为0。`fetch_add`函数是原子的,它将`atomic_value`的值增加1,然后返回增加前的值。`load`函数也是原子的,它返回`atomic_value`的当前值。
### 3.1.2 原子操作的内存顺序
每个原子操作都有一个关联的内存顺序参数,它指定了操作的顺序。C++11定义了六种内存顺序,从松散到严格分别是:
- `std::memory_order_relaxed`
- `std::memory_order_consume`
- `std::memory_order_acquire`
- `std::memory_order_release`
- `std::memory_order_acq_rel`
- `std::memory_order_seq_cst`
默认情况下,`std::atomic`操作使用`std::memory_order_seq_cst`(顺序一致),这是最严格的内存顺序保证。开发者也可以根据需要选择其他内存顺序来优化性能。
```cpp
#include <atomic>
#include <thread>
#include <iostream>
std::atomic<int> atomic_value(0);
std::atomic<bool> ready(false);
void thread_function() {
ready.store(true, std::memory_order_release);
atomic_value.fetch_add(1, std::memory_order_relaxed);
}
int main() {
std::thread t(thread_function);
while (!ready.load(std::memory_order_acquire)) {
// 等待线程工作准备好
}
std::cout << atomic_value.load() << std::endl;
t.join();
return 0;
}
```
在本例中,我们使用`std::memory_order_release`标记`ready.store`操作,这表示写操作在原子操作之后释放。`std::memory_order_acquire`在`while`循环中用于读操作,确保在读取`atomic_value`之前获取了`ready`的最新值。`std::memory_order_relaxed`被用于`fetch_add`操作,因为在循环中`ready`已经被使用了`std::memory_order_acquire`标记,因此不需要`fetch_add`再保证顺序一致。
## 3.2 原子操作的高级用法
### 3.2.1 原子操作的组合
原子操作的组合使用是在复杂的数据结构中保持线程安全的关键。例如,在并发链表的实现中,通常需要组合使用多个原子操作来安全地添加或删除节点。这要求开发者要对原子操作的组合使用非常熟悉,以避免如ABA问题这样的并发错误。
### 3.2.2 无锁编程的基础与技巧
无锁编程是一种使用原子操作以避免使用锁的编程方法。它依赖于原子操作来确保数据的一致性,从而在某些情况下可以显著提升性能。无锁编程的基础是原子的读-改-写操作,这些操作通常是通过特定的原子操作如`compare_exchange_weak`或`compare_exchange_strong`实现的。这些操作检查一个值是否与预期值匹配,如果匹配则更新该值。
```cpp
#include <atomic>
std::atomic<int> atomic_value(0);
void cas_example() {
int expected = atomic_value.load();
int desired = expected + 1;
while (!atomic_***pare_exchange_weak(expected, desired)) {
// 循环直到成功更新
}
}
```
在这个例子中,`compare_exchange_weak`函数尝试将`atomic_value`与`expected`相比较,如果相等则用`desired`更新`atomic_value`。由于它是一个弱比较操作,可能会出现假失败的情况,因此需要放在循环中使用。
## 3.3 并发算法中的原子操作
### 3.3.1 原子操作与并发数据结构
并发数据结构如原子队列、原子栈、原子集合等,都需要使用原子操作来保证多线程环境下的正确性。原子操作在这里起到关键作用,它保证了在并发修改数据时数据结构的状态仍然保持一致。
### 3.3.2 并发算法案例分析
考虑一个并发计数器的实现,它需要支持多线程同时进行增加操作。由于增加操作涉及到读取当前计数值、计算新值、写回新值这一系列步骤,因此需要原子操作来保证线程安全。
```cpp
#include <atomic>
#include <thread>
#include <iostream>
std::atomic<int> counter(0);
void increment_counter(int num_increments) {
for (int i = 0; i < num_increments; ++i) {
counter.fetch_add(1, std::memory_order_relaxed);
}
}
int main() {
std::thread t1(increment_counter, 1000);
std::thread t2(increment_counter, 1000);
t1.join();
t2.join();
std::cout << counter << std::endl; // 输出2000
return 0;
}
```
在这个案例中,`fetch_add`函数用来原子地增加`counter`的值。由于`fetch_add`本身就是原子操作,所以我们不需要使用更高内存顺序要求的版本。多个线程可以同时调用`increment_counter`函数,且无需担心数据竞争问题。
以上例子仅展示了如何使用C++11中的原子操作来实现简单的并发算法。在实际应用中,开发者可能需要实现更复杂的并发算法,这要求他们更深入地理解原子操作以及它们的内存顺序。随着对原子操作使用熟练度的提升,开发者可以创建出既安全又高效的并发程序。
# 4. C++11并发编程实践
## 4.1 并发容器的使用与实现
### 4.1.1 标准库并发容器介绍
在C++11标准中,引入了几个并发安全的容器,它们是专为多线程环境设计的。为了充分利用并发带来的性能提升,正确选择和使用并发容器是非常关键的。并发容器在内部已经处理了线程之间的同步问题,从而减少了开发者在编写并发程序时的负担。
一个值得注意的并发容器是`std::unordered_map`的特化版本`std::unordered_map`,这个特化版本是在C++11标准的后续扩展中被引入的。使用`std::unordered_map`可以提供线程安全的哈希表操作,适合那些需要在多个线程间共享哈希表的场景。其它的并发容器还包括`std::shared_mutex`,它支持多个读操作,但写操作时会独占锁,适合读多写少的场景。
在实际使用这些并发容器时,需要注意其性能特点和适用场景。虽然并发容器可以提供安全的操作,但它们在某些情况下可能会有性能开销。例如,在细粒度的写操作中,频繁地锁定和解锁可能会成为瓶颈。
### 4.1.2 自定义并发容器
在某些情况下,标准库提供的并发容器可能无法满足特定的需求,这时开发者需要自定义并发容器。自定义并发容器可以提供更优的性能,也可以更细致地控制并发行为。然而,这同时也增加了开发的复杂度。
实现自定义并发容器时,通常需要考虑以下要素:
- **同步机制**:需要决定使用哪种同步原语(如互斥锁、读写锁等)。
- **内存管理**:由于多线程的特性,内存管理需要特别小心,以避免数据竞争和内存泄漏。
- **访问控制**:定义合适的接口来确保容器在并发使用时的数据一致性。
例如,一个简单的自定义并发队列可能会使用`std::mutex`和`std::condition_variable`来控制线程间的同步:
```cpp
#include <mutex>
#include <condition_variable>
#include <queue>
template<typename T>
class ThreadSafeQueue {
public:
void push(T new_value) {
std::unique_lock<std::mutex>lk(mtx);
q.push(std::move(new_value));
lk.unlock();
cv.notify_one();
}
void wait_and_pop(T& value) {
std::unique_lock<std::mutex>lk(mtx);
cv.wait(lk, [this]{ return !q.empty(); });
value = std::move(q.front());
q.pop();
}
std::shared_ptr<T> wait_and_pop() {
std::unique_lock<std::mutex>lk(mtx);
cv.wait(lk, [this]{ return !q.empty(); });
std::shared_ptr<T> const res(std::make_shared<T>(std::move(q.front())));
q.pop();
return res;
}
bool try_pop(T& value) {
std::unique_lock<std::mutex>lk(mtx);
if(q.empty())
return false;
value = std::move(q.front());
q.pop();
return true;
}
std::shared_ptr<T> try_pop() {
std::unique_lock<std::mutex>lk(mtx);
if(q.empty())
return std::shared_ptr<T>();
std::shared_ptr<T> const res(std::make_shared<T>(std::move(q.front())));
q.pop();
return res;
}
bool empty() const {
std::unique_lock<std::mutex>lk(mtx);
return q.empty();
}
private:
std::queue<T> q;
mutable std::mutex mtx;
std::condition_variable cv;
};
```
在上述代码示例中,我们自定义了一个`ThreadSafeQueue`类,它使用互斥锁(`std::mutex`)来确保线程安全。使用条件变量(`std::condition_variable`)可以允许线程在特定条件下等待或通知其他线程。这是一个典型的模式,常用于生产者-消费者场景。
## 4.2 多线程任务处理
### 4.2.1 任务队列的实现与管理
在多线程编程中,任务队列是一种常用的技术,用于调度和执行异步任务。任务队列允许我们更好地控制任务的执行顺序,它通常与线程池相结合使用,以实现高效的线程管理和任务执行。
任务队列一般包含以下几个核心组件:
- **任务的存储**:使用容器(例如队列、栈等)存储待处理任务。
- **任务的分发**:将任务从存储容器中取出并分发给空闲的线程。
- **线程池**:一组线程,从任务队列中获取并执行任务。
- **同步机制**:确保任务队列在多线程访问时的安全性。
下面是一个简单的任务队列实现示例:
```cpp
#include <queue>
#include <thread>
#include <mutex>
#include <condition_variable>
#include <functional>
#include <future>
class TaskQueue {
public:
TaskQueue() = default;
~TaskQueue() {
stop();
if (thread.joinable())
thread.join();
}
void stop() {
std::unique_lock<std::mutex> lk(mtx);
stop_ = true;
lk.unlock();
cv.notify_all();
}
void push(std::function<void()> task) {
{
std::unique_lock<std::mutex> lk(mtx);
tasks_.push(std::move(task));
}
cv.notify_one();
}
void run() {
thread = std::thread([this] {
while (true) {
std::function<void()> task;
{
std::unique_lock<std::mutex> lk(mtx);
cv.wait(lk, [this] {
return stop_ || !tasks_.empty();
});
if (stop_ && tasks_.empty())
return;
task = std::move(tasks_.front());
tasks_.pop();
}
task();
}
});
}
private:
std::queue<std::function<void()>> tasks_;
std::mutex mtx;
std::condition_variable cv;
std::thread thread;
bool stop_ = false;
};
```
### 4.2.2 并发执行策略
在多线程程序中,选择合适的并发执行策略非常重要。好的并发执行策略可以提高程序的性能,减少资源的浪费,并且能够适应不同的硬件和任务特性。
常见的并发执行策略包括:
- **无锁编程(Lock-free)**:通过原子操作实现无需锁定的并发访问,适用于高频的读操作和较少的写操作。
- **锁基编程(Lock-based)**:使用锁来同步多线程访问共享资源,适用于对一致性和事务性要求高的场景。
- **线程池(Thread pool)**:使用一组固定大小的工作线程来执行任务,可以有效复用线程,减少创建和销毁线程的开销。
- **工作窃取(Work stealing)**:线程从其他忙碌的线程的任务队列中窃取任务来执行,这可以在任务负载不均匀时提高资源利用率。
实现一个线程池执行策略的例子,可以使用`std::thread`和`std::future`:
```cpp
#include <vector>
#include <thread>
#include <future>
class ThreadPool {
public:
ThreadPool(size_t numThreads) : stop(false) {
for(size_t i = 0; i < numThreads; ++i) {
workers.emplace_back([this] {
while(true) {
std::function<void()> task;
{
std::unique_lock<std::mutex> lock(this->queue_mutex);
this->condition.wait(lock, [this] {
return this->stop || !this->tasks.empty();
});
if(this->stop && this->tasks.empty())
return;
task = std::move(this->tasks.front());
this->tasks.pop();
}
task();
}
});
}
}
template<class F, class... Args>
auto enqueue(F&& f, Args&&... args)
-> std::future<typename std::result_of<F(Args...)>::type> {
using return_type = typename std::result_of<F(Args...)>::type;
auto task = std::make_shared< std::packaged_task<return_type()> >(
std::bind(std::forward<F>(f), std::forward<Args>(args)...)
);
std::future<return_type> res = task->get_future();
{
std::unique_lock<std::mutex> lock(queue_mutex);
// don't allow enqueueing after stopping the pool
if(stop)
throw std::runtime_error("enqueue on stopped ThreadPool");
tasks.emplace([task](){ (*task)(); });
}
condition.notify_one();
return res;
}
~ThreadPool() {
{
std::unique_lock<std::mutex> lock(queue_mutex);
stop = true;
}
condition.notify_all();
for(std::thread &worker: workers)
worker.join();
}
private:
std::vector<std::thread> workers;
std::queue<std::function<void()>> tasks;
std::mutex queue_mutex;
std::condition_variable condition;
bool stop;
};
```
## 4.3 并发编程的性能优化
### 4.3.1 分析并发程序的性能瓶颈
并发程序的性能优化通常从分析程序的性能瓶颈开始。瓶颈可能出现在多个方面,包括但不限于CPU、内存、IO和同步机制的使用等。
- **CPU瓶颈**:多线程程序如果无法有效利用CPU资源,可能是由于线程数量少于CPU核心数,或者线程间的负载不均衡。
- **内存瓶颈**:大量分配和释放内存可以导致内存碎片化和缓存污染。
- **IO瓶颈**:频繁的IO操作(如文件访问和网络通信)可能会成为程序的瓶颈,尤其是当IO操作是串行进行时。
- **同步机制**:不当的使用同步原语(如锁竞争)可能会导致大量的线程阻塞,影响程序性能。
要分析和优化并发程序的性能,可以使用如下的方法:
- **性能分析工具**:使用`gprof`、`Valgrind`的`callgrind`等工具来识别性能瓶颈。
- **同步原语的优化**:选择合适的同步机制和减少锁的粒度,例如使用读写锁、原子操作等。
- **负载均衡**:确保多线程之间的工作负载均衡,避免某些线程过载而其它线程空闲。
### 4.3.2 优化策略和最佳实践
在对并发程序进行优化时,有一些策略和最佳实践可以帮助提高程序的性能和效率。
- **减少锁的使用**:尽量减少对共享资源的锁定时间,使用更细粒度的锁,或者在合适的情况下使用无锁编程。
- **避免线程过多**:线程的数量不是越多越好,过多的线程会导致上下文切换的开销,以及资源竞争的问题。
- **合理使用线程池**:线程池可以复用线程,减少线程创建和销毁的开销,同时可以控制并发的数量。
- **缓存友好的数据结构**:设计时考虑数据结构的内存布局,以利用现代CPU的缓存系统。
一个常见的优化示例是使用原子操作来代替锁,以减少同步开销:
```cpp
#include <atomic>
#include <thread>
#include <iostream>
std::atomic<int> count(0);
void increase() {
for(int i = 0; i < 1000; ++i) {
count.fetch_add(1, std::memory_order_relaxed);
}
}
int main() {
std::thread t1(increase);
std::thread t2(increase);
t1.join();
t2.join();
std::cout << "Count: " << count << std::endl;
return 0;
}
```
在上述代码中,我们使用`std::atomic`的`fetch_add`方法来原子性地增加计数器的值。这样就无需使用锁,同时也可以保证操作的原子性和一致性。
为了构建完整的章节,第四章应该包含对实践中并发编程的介绍,包括对标准并发容器的介绍和自定义并发容器的实现,多线程任务处理中的任务队列实现和并发执行策略,以及针对并发编程性能优化的分析和优化策略。代码示例、性能分析工具的使用、同步原语的优化以及线程池的介绍都是本章内容的亮点。通过这些内容,我们可以为读者提供一个全面深入的理解,并且提高他们对并发编程实践的认识。
# 5. C++11并发编程常见问题与调试
## 5.1 多线程程序的调试技巧
### 5.1.1 调试工具的选择与使用
在开发多线程应用时,有效的调试工具是至关重要的。调试多线程程序的一个主要挑战在于,它要求开发者能够理解程序的执行流程和线程之间的交互。一个常用的调试工具是GDB(GNU Debugger),它是C++开发人员的老朋友。当使用GDB调试多线程C++程序时,我们可以利用其提供的命令来控制程序的执行,并检查多个线程的状态。
为了在GDB中管理多线程调试,我们可以使用如下命令:
- `info threads`:列出所有线程,及其状态和栈帧信息。
- `thread [thread-id]`:切换到指定的线程进行调试。
- `set scheduler-locking on/off/step`:控制线程执行,只在当前线程执行或者跟随单步执行。
- `break [location] thread all`:在指定位置为所有线程设置断点。
另一个工具是Intel的 Parallel Studio Inspector,它专门针对多线程程序设计,可以帮助开发者检测数据竞争、死锁和其他线程安全问题。它提供了图形界面和更高级的分析能力,能够帮助开发者更快地定位问题。
### 5.1.2 常见并发错误案例分析
并发编程中的常见错误包括死锁、数据竞争、活锁和资源饥饿等。这里我们以数据竞争为例,展示如何使用调试工具来定位和分析问题。
假设我们有一个简单的C++程序,其中包含两个线程访问共享资源但未正确同步:
```cpp
#include <iostream>
#include <thread>
#include <vector>
std::vector<int> data;
std::mutex m;
void thread_func(int n) {
for (int i = 0; i < n; ++i) {
m.lock();
data.push_back(i);
m.unlock();
}
}
int main() {
std::thread t1(thread_func, 500);
std::thread t2(thread_func, 500);
t1.join();
t2.join();
std::cout << "Data size: " << data.size() << std::endl;
return 0;
}
```
在运行这段代码时,我们可能会发现数据大小不是预期的1000,而是少于这个值,这暗示了数据竞争的存在。此时,我们可以使用GDB来调试:
1. 在GDB中启动程序:`gdb ./a.out`
2. 在适当的位置(例如`data.push_back(i);`)添加断点,并在GDB中运行程序。
3. 使用`info threads`列出所有线程,并通过`thread [thread-id]`切换到出现问题的线程。
4. 使用`bt`(backtrace)命令查看当前线程的调用栈。
5. 使用`step`单步执行程序,观察在执行过程中的内存访问情况。
通过上述步骤,开发者可以逐步定位导致数据竞争的具体原因。
## 5.2 原子操作中的竞态条件
### 5.2.1 竞态条件的识别与防范
竞态条件是指程序的输出依赖于事件发生的相对时间或顺序的情况。在多线程环境中,如果两个或多个线程以非确定的方式共享数据或资源,就可能发生竞态条件,导致不可预测的结果。
识别竞态条件的一个有效方式是逻辑分析。开发者需要理解每个线程对共享资源的访问顺序,并确认这些顺序是否可能以不可预测的方式交织在一起。代码审计和代码评审是发现潜在竞态条件的重要手段。
防范竞态条件的常见策略包括:
- 使用互斥锁或其他同步机制保护共享资源的访问。
- 仅在必要时共享数据。
- 使用原子操作减少需要同步的代码量。
### 5.2.2 防范竞态条件的实践技巧
在C++11中,`std::atomic`模板类提供了执行原子操作的手段,它们可以用来防范竞态条件。原子操作是不可中断的操作,执行过程中不会被其他线程干扰。
考虑以下示例,演示如何使用`std::atomic`来防止对共享变量的竞争:
```cpp
#include <atomic>
#include <thread>
std::atomic<int> shared_var(0);
void increment() {
for (int i = 0; i < 1000; ++i) {
shared_var.fetch_add(1, std::memory_order_relaxed);
}
}
int main() {
std::thread t1(increment);
std::thread t2(increment);
t1.join();
t2.join();
std::cout << "Value: " << shared_var << std::endl;
return 0;
}
```
在上述代码中,`shared_var`是一个`std::atomic<int>`类型的实例。这确保了即使多个线程同时对其执行`fetch_add`操作,每次操作都是原子的,从而避免了数据竞争。
## 5.3 并发编程的测试策略
### 5.3.1 测试并发代码的方法
并发编程的测试比顺序编程要复杂得多,因为需要考虑多种执行路径和线程间交互。并发代码测试的目标是确保程序在各种并发条件下都能正确地工作。
测试并发代码的策略包括:
- **静态分析**:使用静态分析工具(如Coverity、Cppcheck)检测代码中的潜在并发问题。
- **单元测试**:针对并发代码编写单元测试,确保它们在并发条件下能正确运行。
- **压力测试**:通过模拟高负载下的操作来测试系统的行为。
- **检查点测试**:在关键代码段之后设置检查点,验证关键数据的状态。
- **模拟多线程**:使用测试框架(如Google Test)来模拟多线程环境。
### 5.3.2 持续集成中的并发测试
在持续集成(CI)系统中自动化并发测试,能够确保每次代码提交都通过了严格的并发环境测试。这有助于早期发现并解决并发问题,从而提高代码质量。
在CI系统中进行并发测试的步骤可能包括:
- **环境准备**:在CI环境中搭建可以运行并发测试的基础设施。
- **测试执行**:配置CI系统执行并发测试脚本,并发测试可以是集成测试或单元测试。
- **结果分析**:分析并发测试的输出,检查是否发生了预期之外的行为。
- **监控与警报**:在发现测试失败或性能瓶颈时,通过邮件或其他通知机制发送警报。
下面是一个简单的并行测试Mermaid流程图示例:
```mermaid
graph TD;
A[开始并发测试] --> B[准备测试环境];
B --> C[执行并发测试脚本];
C --> D[检查测试结果];
D --> |测试成功| E[继续CI流程];
D --> |测试失败| F[发送通知并阻塞];
E --> G[结束测试并更新状态];
F --> G;
```
持续集成中的并发测试可以大大提升开发效率和软件稳定性,但需要仔细配置和执行。通过这种方式,开发团队可以在软件开发周期的早期发现并发相关问题,并及时修复它们。
# 6. C++11并发编程案例与展望
在前几章节中,我们已经深入探讨了C++11并发编程的基础知识、原子操作、实践技巧和调试方法。本章将通过对现实世界中的并发应用案例的分析以及对未来的展望,帮助读者更好地理解并发编程在实际中的应用与发展趋势。
## 6.1 现实世界中的并发应用案例
并发编程的应用遍及软件开发的各个领域,尤其在需要高吞吐量和低延迟的系统中显得尤为重要。本节将分析两个典型的现实应用案例:高并发服务器架构设计与并发在游戏开发中的应用。
### 6.1.1 高并发服务器架构设计
高并发服务器架构设计是并发编程应用的一个热点领域。在这一部分,我们将剖析一个高性能服务器的并发设计案例,重点关注如何使用C++11的并发特性来实现高效的服务器架构。
服务器架构设计的关键在于能够处理大量并发连接,同时保持低延迟和高吞吐量。以下是设计过程中的几个核心要点:
- **事件驱动模型:** 利用事件驱动模型来实现非阻塞I/O,减少线程的使用,以适应高并发场景。
- **线程池:** 使用线程池处理I/O操作,复用线程资源,避免频繁创建和销毁线程带来的性能开销。
- **无锁数据结构:** 在高流量路径上采用无锁数据结构以减少锁竞争,提高效率。
- **负载均衡:** 通过负载均衡技术分发请求,防止单个节点过载。
一个典型的服务器架构通常包含以下几个关键组件:
- **主线程:** 负责监听新的连接请求,并将工作分发给工作线程。
- **工作线程:** 执行具体的服务逻辑,处理客户端的请求。
- **I/O线程:** 管理非阻塞的网络I/O事件,负责数据的接收和发送。
- **任务队列:** 在多个工作线程之间分发任务,保持任务队列的高效运作是实现高并发的关键。
代码示例:
```cpp
// 示例:使用线程池来处理并发任务
#include <thread>
#include <vector>
#include <queue>
#include <mutex>
#include <condition_variable>
class ThreadPool {
private:
std::vector<std::thread> workers;
std::queue<std::function<void()>> tasks;
std::mutex queue_mutex;
std::condition_variable condition;
bool stop;
void workerThread() {
while (true) {
std::function<void()> task;
{
std::unique_lock<std::mutex> lock(this->queue_mutex);
this->condition.wait(lock, [this] {
return this->stop || !this->tasks.empty();
});
if (this->stop && this->tasks.empty())
return;
task = std::move(this->tasks.front());
this->tasks.pop();
}
task();
}
}
public:
ThreadPool() : stop(false) {
int thread_count = std::thread::hardware_concurrency();
for (int i = 0; i < thread_count; ++i) {
workers.emplace_back([this] { this->workerThread(); });
}
}
template<class F, class... Args>
auto enqueue(F&& f, Args&&... args)
-> std::future<typename std::result_of<F(Args...)>::type> {
using return_type = typename std::result_of<F(Args...)>::type;
auto task = std::make_shared< std::packaged_task<return_type()> >(
std::bind(std::forward<F>(f), std::forward<Args>(args)...)
);
std::future<return_type> res = task->get_future();
{
std::unique_lock<std::mutex> lock(queue_mutex);
if(stop) throw std::runtime_error("enqueue on stopped ThreadPool");
tasks.emplace([task](){ (*task)(); });
}
condition.notify_one();
return res;
}
~ThreadPool() {
{
std::unique_lock<std::mutex> lock(queue_mutex);
stop = true;
}
condition.notify_all();
for (std::thread &worker: workers) {
worker.join();
}
}
};
```
通过以上示例,我们可以看到如何使用C++11来创建一个简单的线程池来处理并发任务。这段代码展示了线程池如何管理线程和任务队列,同时保证了线程安全和任务的有序执行。
### 6.1.2 并发在游戏开发中的应用
游戏开发是一个复杂的过程,涉及到许多并发问题。在这一部分,我们将探讨并发编程在游戏开发中的一些应用场景,包括:
- **多线程渲染:** 使用多个线程进行渲染,可以有效利用多核处理器的优势,提升渲染效率。
- **物理引擎:** 物理引擎需要处理大量的碰撞检测和物理模拟计算,通常通过多线程并行计算来提高性能。
- **网络通信:** 游戏中的网络通信模块需要处理多玩家的连接和数据同步,这是典型的并发编程任务。
在游戏开发中,合理地使用并发可以显著提升游戏性能和玩家体验。例如,一个常见的技术是使用单独的线程来处理AI决策,避免AI计算影响游戏的主循环。另一个技术是在主线程之外使用工作线程来加载资源,从而实现无缝的游戏场景过渡。
## 6.2 C++并发编程的未来方向
随着硬件和软件技术的发展,C++并发编程也在不断地演进。C++20作为最新版的标准,对并发编程进行了显著的增强,比如引入了协程等新的并发工具。
### 6.2.1 C++20中的并发增强
C++20对并发编程的增强是革命性的,新增特性如下:
- **协程(Coroutines):** 协程提供了简化异步编程的方法,允许以同步代码的风格编写异步代码,极大简化了异步操作的复杂性。
- **std::jthread:** 一个可以被优雅地中断的线程类,它解决了`std::thread`中的一些缺陷,如对异常处理和取消操作的支持不足。
- **原子操作的改进:** 提供了更多的原子类型和操作,优化了原子操作的性能,并且增加了更多内存顺序的选项。
C++20的这些增强将使得编写并发程序变得更加容易和高效。开发者可以期待更加简洁和强大的并发程序。
### 6.2.2 C++并发编程的学习资源与社区
学习C++并发编程可以借助多种资源,如官方文档、开源项目、教程和社区讨论。以下是几个推荐的学习资源:
- ***:** 提供了详尽的C++标准库的文档,包括并发库的使用和解释。
- **书籍:** 《C++ Concurrency in Action》和《The Art of Multiprocessor Programming》是并发编程领域内的经典书籍。
- **在线课程和教程:** 多家在线教育平台提供了C++并发编程的课程,适合不同阶段的学习者。
社区方面,Stack Overflow是解决并发编程问题的好地方,而GitHub上的开源项目则提供了大量的并发编程实例。
## 6.3 结语
通过本章对并发编程案例的分析与对未来的展望,我们希望能加深你对C++11并发编程的理解,并激发你对并发编程的兴趣。尽管并发编程具有一定的复杂性,但它为高性能软件的开发提供了强大的工具。随着C++标准的不断更新和完善,我们有理由相信并发编程将在未来发挥越来越重要的作用。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
1024大促
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
C#缓存与SEO优化:提升搜索引擎排名的缓存应用指南
# 1. C#缓存与SEO基础
## 简介
缓存技术在现代Web开发中扮演着至关重要的角色,尤其对于搜索引擎优化(SEO),缓存可以显著提升网站性能和用户体验。C#作为一种强大的编程语言,提供了多种缓存机制来优化应用程序。本章将为读者奠定C#缓存技术与SEO基础。
## 缓存的概念和重要性
缓存是一种存储临时数据的快速存取方法,可以减少数据库或网络资源的访问次数,从而提高应用程序的响应速度和效率。在Web环境中,合理的缓存策略能够减少服务器负载,提升页面加载速度,这对SEO非常有利。
## C#支持的缓存类型概述
C#支持多种缓存类型,包括内存缓存(MemoryCache)、分布式缓存(
C++11 atomic操作详解:同步机制的深化理解

# 1. C++11中的原子操作基础
## 1.1 原子操作的定义与重要性
在多线程程序设计中,原子操作是不可分割的基本操作单元,它保证了在任何时刻,对某个变量的修改要么完全发生,要么完全不发生。这在并发编程中至关重要,因为它可以防止多个线程同时操作同一数据时产生冲突和不一致的结果。
## 1.2 C++11中原子操作的引入
C++11标准引入了 `<atomic>` 头文件,提供了原子操作的定义和实
并发编程的哲学:从思想到实践深入理解CompletableFuture设计理念

# 1. 并发编程的哲学和重要性
在现代软件开发中,尤其是在追求高性能和用户体验的应用中,**并发编程**成为了不可或缺的一部分。并发编程的哲学基于资源的合理分配和任务的有效处理,它的核心在于将复杂问题分解为可以并行执行的小任务,从而利用多核心处理器的能力,加快程序的执行速度和响应时间。从最早的多线程模型到现代的响应式编程框架,每
golint最佳实践案例分析:成功运用golint的策略与技巧(案例解读)
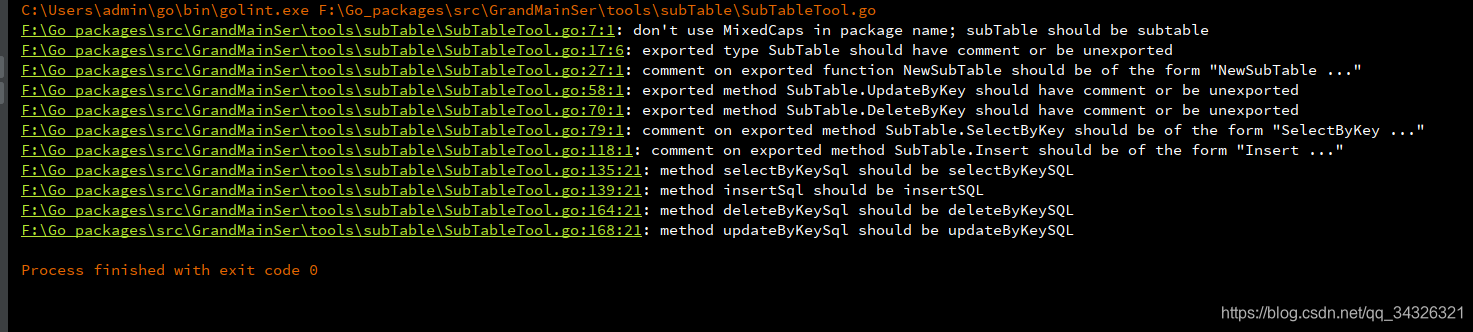
# 1. golint工具概述
在Go语言的开发过程中,代码质量和风格一致性至关重要。golint是Go语言社区中广泛使用的一个静态
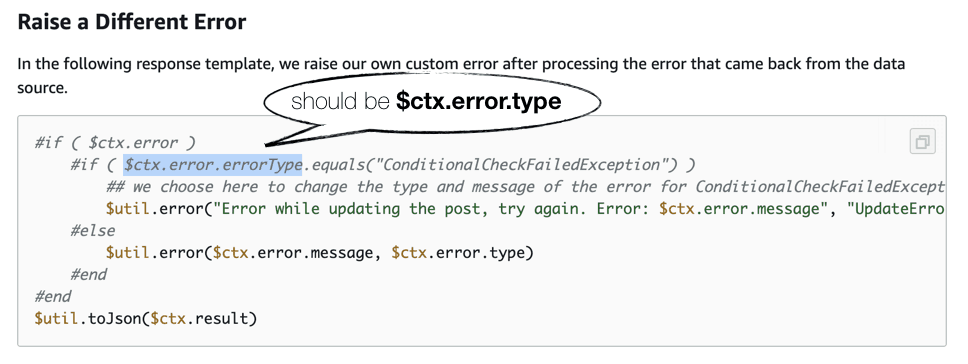
Go errors包与RESTful API:创建一致且用户友好的错误响应格式

# 1. 理解RESTful API中的错误处理
RESTful API的设计哲学强调的是简洁、一致和面向资源,这使得它在构建现代网络服务中非常流行。然而,与任何技术一样,API在日常使用中会遇到各种错误情况。正确处理这些错误不仅对于维护系统的健壮性和用户体验至关
C#日志记录经验分享:***中的挑战、经验和案例
# 1. C#日志记录的基本概念与必要性
在软件开发的世界里,日志记录是诊断和监控应用运行状况的关键组成部分。本章将带领您了解C#中的日志记录,探讨其重要性并揭示为什么开发者需要重视这一技术。
## 1.1 日志记录的基本概念
日志记录是一个记录软件运行信息的过程,目的是为了后续分析和调试。它记录了应用程序从启动到执行过程中发生的各种事件。C#中,通常会使用各种日志框架来实现这一功能,比如NLog、Log4Net和Serilog等。
## 1.2 日志记录的必要性
日志文件对于问题诊断至关重要。它们能够提供宝贵的洞察力,帮助开发者理解程序在生产环境中的表现。日志记录的必要性体现在以下
Go语言自定义错误类型的设计模式:如何构建灵活的错误处理机制
# 1. 错误处理在Go语言中的重要性
在软件开发的世界里,错误处理是确保程序稳定和可靠运行的关键。Go语言,以其简洁和高效著称,特别强调错误处理的重要性。它不提供异常机制,而是使用显式的错误值来表示错误状态,这使得开发者必须在编写代码时考虑到可能出现的错误情况,并给予适当的处理。良好的错误处理不仅能够提升程序的鲁棒性,还能够优化用户体验,为用户提供清晰的错误信息和恢复途径
提升并行任务效率:ForkJoinPool与缓存优化实战指南
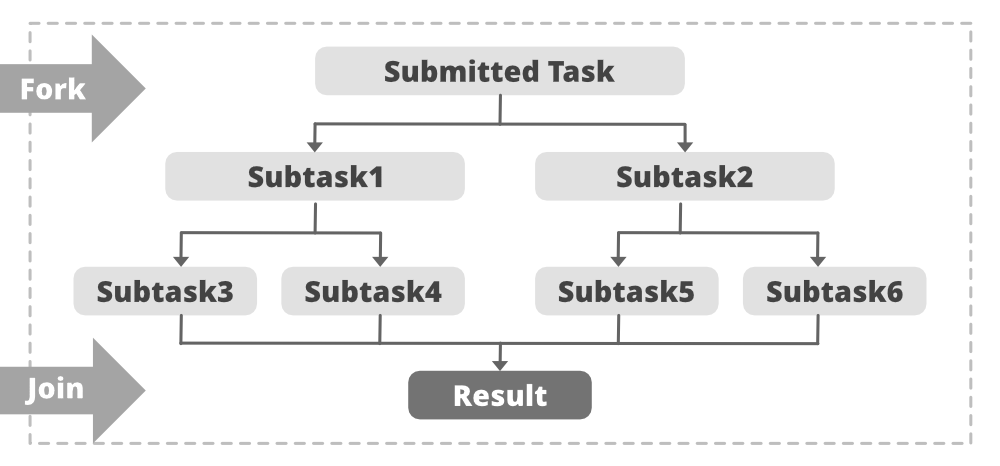
# 1. 并行计算与ForkJoinPool基础
在现代IT领域,数据的处理量已经达到了前所未有的规模,如何高效处理这些数据,提高计算资源的利用率,成为开发者面临的主要挑战之一。并行计算,作为一种可以显著提升计算性能的手段,正受到越来越多的关注。在此背景下,Java 5 引入的 ForkJoinPool 成为
C++14 std::exchange函数:简化赋值和交换操作的3大优势
# 1. C++14 std::exchange函数概述
在现代C++编程中,std::exchange是一个被广泛使用的工具函数,它提供了一种简洁的方式来为对象赋予新值并返回旧值。这个函数在处理赋值操作时能够帮助开发者写出更加清晰和高效的代码。std::exchange不仅使得代码更加易于理解,还能在很多情况下提升性能。本章将介绍std::exchang
【C#配置管理优化术】:数据库连接字符串的高效管理

# 1. C#配置管理概述
在现代软件开发中,配置管理是一种关键实践,它涉及到软件系统运行时环境参数的管理。C#作为.NET平台的核心语言,提供了丰富的配置管理选项来适应不同的部署和运行环境
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
1024大促
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )