机械制图-其他表达方法
发布时间: 2024-01-30 17:48:44 阅读量: 36 订阅数: 22 

机械制图之剖视图断面图局部放大图等机件常用的表达方法PPT教案.pptx
# 1. 介绍机械制图和其重要性
## 1.1 机械制图的定义和基本概念
机械制图是一种通过图形和符号来描述和传达机械零件及其装配关系的技术。它是机械设计和制造中不可或缺的一部分,用于表达设计师的想法、指导生产过程和交流沟通。
机械制图的基本概念包括以下几个方面:
- **图纸**:机械制图的主要表达方式是通过绘制图纸来呈现设计图形和信息,图纸是机械制图的主要载体。
- **视图**:机械零件需要从不同方向进行观察和表达,通常使用正射投影法或斜投影法绘制多个视图,包括主视图、俯视图和侧视图等。
- **标注**:为了准确描述和说明机械零件的尺寸、形状和位置等信息,需要在图纸上添加标注,如直线尺寸、角度尺寸、字母标注等。
- **符号**:机械制图中使用一些标准的符号表示特定的元素或功能,如零件符号、表面粗糙度符号、焊接符号等。
- **尺寸链**:为了确定机械零件的尺寸关系和定位,使用尺寸链来连接和限制各个尺寸。
机械制图的基本概念和规范有助于准确、清晰地表达设计意图,保证设计和制造的准确性和可行性。
## 1.2 机械制图的应用领域和作用
机械制图广泛应用于机械工程、制造工程、航空航天工程等领域,对于以下方面具有重要作用:
- **设计阶段**:通过机械制图,设计师可以将自己的设计理念具体化,并为后续制造和装配过程提供依据。
- **制造阶段**:机械制图直接指导生产过程,包括零部件的加工、装配和调试,保证产品制造的准确性和一致性。
- **维修与更新**:机械制图记录了机械产品的具体构造和零件信息,为维修和更新提供参考,节约时间和成本。
- **交流与沟通**:机械制图作为一种标准化的技术语言,可以实现设计师、工程师和制造人员之间的有效沟通和交流,避免误解和错误。
总之,机械制图在机械设计和制造过程中起到了至关重要的作用,是实现设计意图、保证产品质量和提高生产效率的重要工具。
# 2. 常用的机械制图方法
机械制图是机械设计中必不可少的一环,通过图纸形式来表达设计师的想法并与其他人共享。常用的机械制图方法主要包括正射投影法、斜投影法和透视投影法。
### 2.1 正射投影法
正射投影法是一种将三维物体的投影转换为二维图纸的方法。它通过将物体与投影平面垂直投影,将物体的各个部分投射到平行于投影平面的各个投影面上,来实现对物体形状和尺寸的准确描述。
```python
# 示例代码
from mpl_toolkits.mplot3d import Axes3D
import matplotlib.pyplot as plt
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
# 绘制立方体
r = [-1,1]
X, Y = np.meshgrid(r, r)
Z = np.ones((2,2))
ax.plot_surface(X, Y, Z, alpha=0.5)
# 设置坐标轴范围
ax.set_xlim(-2, 2)
ax.set_ylim(-2, 2)
ax.set_zlim(0, 2)
# 设置坐标轴标签
ax.set_xlabel("X")
ax.set_ylabel("Y")
ax.set_zlabel("Z")
plt.show()
```
这段代码使用了matplotlib库绘制了一个立方体的三维图形,并将其通过正射投影法转换为二维图纸。通过设置坐标轴的范围和标签,可以更清晰地表达物体的形状和尺寸。
### 2.2 斜投影法
斜投影法是一种将三维物体的投影转换为二维图纸的方法,与正射投影法相似,但投影方向与投影平面不垂直。斜投影法可以更直观地表达物体的外观,常用于一些展示性的图纸。
```java
// 示例代码
import java.awt.*;
import javax.swing.*;
public class IsometricProjection extends JFrame {
public IsometricProjection() {
setTitle("Isometric Projection");
setSize(600, 400);
setLocationRelativeTo(null);
setDefaultCloseOperation(JFrame.EXIT_ON_CLOSE);
setVisible(true);
}
@Override
public void paint(Graphics g) {
super.paint(g);
// 绘制立方体
Graphics2D g2d = (Graphics2D) g;
g2d.translate(300, 200);
g2d.scale(1, 0.5);
int[] xPoints = {0, 100, 200, 100};
int[] yPoints = {0, 100, 0, -100};
g2d.setColor(Color.RED);
g2d.fillPolygon(xPoints, yPoints, 4);
int[] xPoints2 = {0, 100, 200, 100};
int[] yPoints2 = {0, -100, 0, 100};
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【MySQL InnoDB数据恢复专家教程】:全面解析数据恢复的10个必要步骤
# 摘要
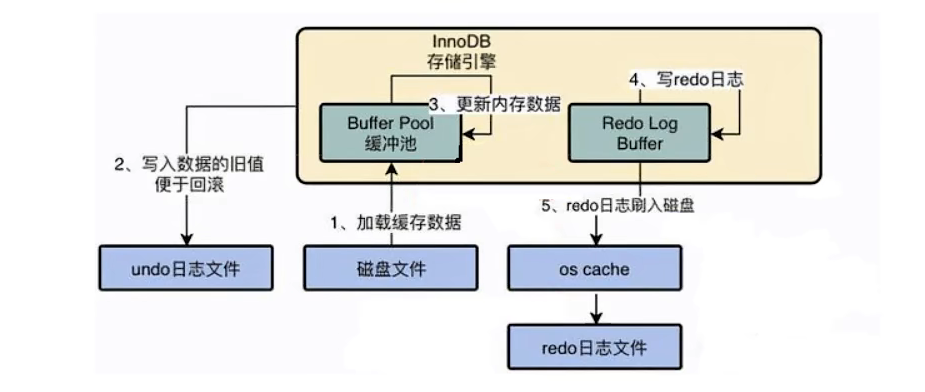
随着信息技术的迅速发展,数据库的稳定性与数据安全性变得尤为重要。本文全面介绍了MySQL InnoDB存储引擎的数据恢复过程,从基础知识到恢复前的准备工作,再到具体的数据恢复方法和步骤。首先阐述了InnoDB存储引擎的结构、事务和锁机制,然后讨论了在数据损坏和系统故障等不同情况下应做的准备工作和备份的重要性。接着,本文详细说
流式处理速成课:设计高效流处理架构的5个实战技巧

# 摘要
流式处理作为一种新兴的数据处理范式,已经成为实时分析和大数据处理的重要技
MySQL基础精讲:5个步骤搞定数据库设计与SQL语句

# 摘要
本文旨在深入介绍MySQL数据库系统的各个方面,包括其基本概念、安装过程、数据库和表的设计管理、SQL语言的基础及进阶技巧和优化,以及MySQL的高级应用。文中首先提供了MySQL的简介和安装指南,随后详细探讨了数据库和表的设计原则,包括规范化理论、逻辑结构设计以及表的创
深入探索AAPL协议:苹果配件开发进阶必备知识
# 摘要
AAPL协议作为一套为特定领域设计的通信标准,其在功能实现、安全性和与其他系统集成方面表现出色。本文首先概述了AAPL协议的基本概念和理论基础,解析了协议的层次结构、核心组件以及数据封装与传输机制。随后,重点介绍了AAPL协议在开发实践中的应用,包括开发环境的搭建、编程接口的使用以
【光模块发射电路全攻略】:彻底掌握设计、测试、优化到故障排除
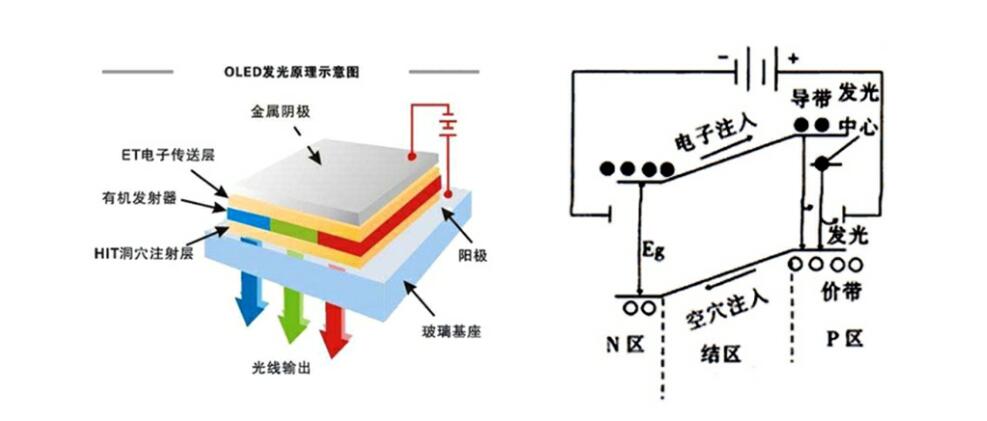
# 摘要
光模块发射电路的设计对于高速数据通信系统的性能和可靠性至关重要。本文首先概述了光模块发射电路设计的基础,涵盖了光通信的理论基础、关键组件选择及技术原理。接着,文章深入探讨了设计实践过程中的注意事项、仿真分析方法以及原型制作和测试。此外,本文还着重分析了电路优化技术与故障排除方法,并对光模块发射电路未来的发展趋势进行了展望,包括新技术的应用前景、行业标准的重
【SIM卡故障诊断手册】:专业IT人士的必备工具
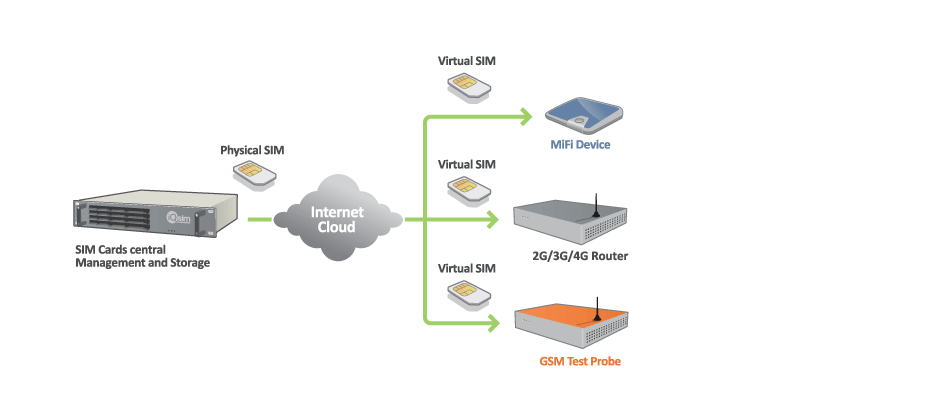
# 摘要
SIM卡是现代通信设备不可或缺的组成部分,其稳定性和安全性对移动通信至关重要。本文全面概述了SIM卡故障诊断的基础知识,深入分析了硬件和软件层面的故障原因,探讨了故障诊断工具和维护技巧。通过对SIM卡物理结构、供电要求、操作系统、应用程序故障的详细讨论,以及对常见故障排除技巧的介绍,本文旨在为行业人员提供一套实用的故障诊断和维护指南。最后,本文展望了SI
红外遥控信号捕获与解码入门:快速上手技巧

# 摘要
红外遥控技术作为一种无线通信手段,在家用电器和消费电子产品中广泛应用。本文首先介绍了红外遥控信号捕获与解码的基础知识,然后深入探讨了红外通信的理论基础,包括红外光的物理特性和红外遥控的工作模式,以及红外遥控信号的编码方式如脉冲编码调制(PCM)和载波频率。文章接着讨论了红外遥控信号捕获所
【性能调优】:Web后台响应速度提升的关键步骤

# 摘要
随着Web应用对性能要求的不断提升,后台性能调优成为保证用户体验和系统稳定性的关键。
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )