




状态空间分析与控制系统优化:从理论到实践的高效路径

摘要
状态空间分析是一种强大的工具,广泛应用于控制系统的性能评估和设计。本文首先介绍了状态空间分析的基础知识,包括控制系统的目标、分类、性能指标以及理论概念。接着,探讨了建立状态空间模型的详细方法,以及通过数学工具对模型进行分析的技术。本文还深入讨论了控制系统优化策略,包括设计原则、状态反馈控制器和观测器的配置方法。通过工业过程和运动控制系统的案例分析,展示了状态空间分析在实际中的应用。最后,展望了控制系统的未来趋势,重点是智能控制技术的融合、环境适应性和网络化控制系统的发展前景。本文意在为读者提供控制系统分析与设计的全面视角,以及对未来发展的深入洞察。
关键字
状态空间分析;控制系统;性能指标;稳定性;状态反馈;智能控制技术
参考资源链接:现代控制理论:对偶原理与状态空间分析
1. 状态空间分析基础
在现代控制理论中,状态空间分析是一种强大的技术,它允许工程师以一种系统化和全面的方式来理解和设计复杂系统。状态空间模型用一组一阶微分方程来描述系统的动态行为,这为分析系统的稳定性和可控性提供了数学基础。
1.1 状态空间模型的定义
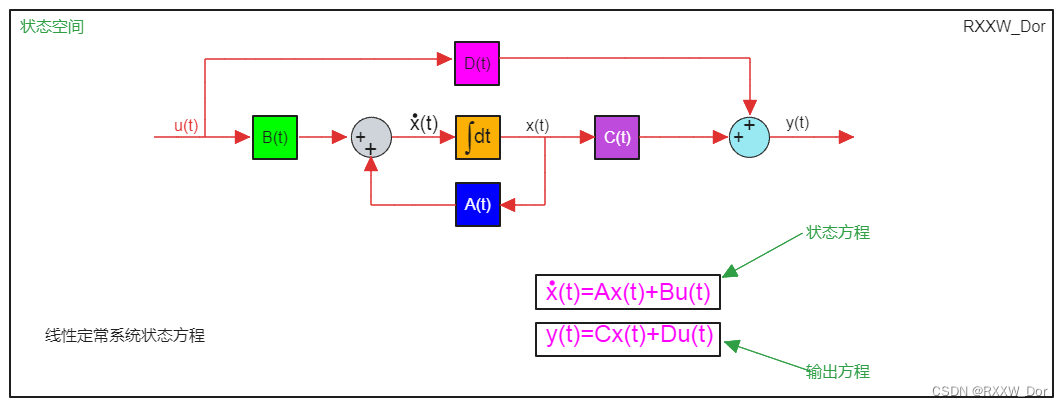
状态空间模型由两部分组成:状态方程和输出方程。状态方程描述了系统内部状态如何随时间变化,而输出方程则描述了系统的输出是如何从当前状态和输入计算出来的。
1.2 状态空间模型的数学基础
状态空间模型的数学基础包括向量空间、矩阵理论以及微分方程等。对状态空间模型的深入理解需要对这些数学概念有透彻的认识。例如,线性代数中的矩阵运算,特别是矩阵乘法和求逆,对于理解和操作状态方程至关重要。
1.3 状态空间分析的应用
在实际应用中,状态空间分析不仅限于理论研究,它已被广泛应用于控制系统的设计和优化中,如飞行器的导航和控制、工业过程的自动化,以及机器人技术等众多领域。通过状态空间模型,工程师能够精确地评估和设计出更为复杂且性能更优的控制系统。
2. 控制系统的基本理论
2.1 控制系统的目标与分类
控制系统设计的目标在于实现预期的动态行为,并满足一系列的性能指标,同时保证系统的稳定性和可靠性。根据控制目的和结构特点,控制系统可以分为多种类型。
2.1.1 控制系统的性能指标
在设计控制系统时,需要考虑以下关键性能指标:
- 精度:系统对输入信号的响应与期望输出之间的接近程度。
- 稳定性:系统在受到干扰或变化时能否保持或恢复到正常工作状态。
- 快速性:系统达到稳定状态所需的时间长短。
- 鲁棒性:系统在面对参数变化和外部扰动时的性能表现。
控制系统的设计过程中,必须在这些指标之间做出权衡,以满足实际应用的需求。
2.1.2 控制系统的类型概述
控制系统的分类广泛,常见的有以下几种:
- 按控制方式分类:包括开环控制系统、闭环控制系统和半闭环控制系统。
- 按结构特征分类:包括线性系统、非线性系统、时变系统和时不变系统。
- 按功能用途分类:如温度控制、压力控制、位置控制等。
通过这些分类,可以对控制系统进行深入的理论分析和实际应用。
2.2 控制理论的基本概念
控制理论为设计和分析控制系统提供了数学工具和方法论基础。
2.2.1 开环与闭环控制系统
开环控制系统与闭环控制系统的区别在于系统的反馈机制。
-
开环控制系统不考虑系统输出对控制作用的影响,其控制作用仅依赖于输入信号。典型的开环控制系统的例子是家用微波炉,它的运作时间由用户设定,与食物加热程度无关。
-
闭环控制系统具有反馈回路,能够根据系统输出自动调整控制作用。例如,家用空调在监测到室内温度后,会自动调节制冷或加热以达到设定温度。
2.2.2 稳定性、可控性和可观测性的理论基础
稳定性、可控性和可观测性是衡量控制系统性能的三个核心理论属性。
- 稳定性指的是系统对初始条件或外部干扰的反应,如果系统在有限时间内回到平衡状态,那么系统是稳定的。
- 可控性指的是系统状态能否通过合适的控制输入达到任意状态。
- 可观测性则描述系统状态是否能通过系统的输出信号来确定。
理解这些概念对于控制系统的设计和分析至关重要。
2.3 状态空间模型的建立
状态空间模型提供了一种数学框架,用于描述和分析动态系统。
2.3.1 状态变量的选择与定义
在状态空间模型中,系统的当前状态可以通过一组状态变量来描述。
- 状态变量通常代表系统内部能量存储元件的物理量,如电容电压、电感电流等。
- 选择合适的状态变量对于建立有效的控制系统至关重要,它影响了系统分析和设计的复杂度。
2.3.2 状态方程与输出方程的推导
状态方程描述了系统状态随时间的变化规律,而输出方程定义了系统的输出与状态变量之间的关系。
- 状态方程通常是微分方程的形式,用于描述系统内部状态的变化。
- 输出方程将系统的状态变量和控制输入联系起来,产生系统输出。
这两类方程是构建状态空间模型的基础,对于后续的系统分析和控制器设计至关重要。
3. 状态空间分析工具与方法
3.1 状态空间分析的数学工具
3.1.1 矩阵理论在状态空间中的应用
在状态空间分析中,矩阵理论是理解系统动态行为的基础。系统状态方程通常表示为:
[ \dot{x}(t) = Ax(t) + Bu(t) ]
其中,( \dot{x}(t) ) 是状态向量的时间导数,( x(t) ) 是状态向量,( u(t) ) 是输入向量,( A ) 是系统矩阵,( B ) 是输入矩阵。矩阵( A ) 描述了系统的内在动态特性,而矩阵( B ) 描述了系统如何响应外部输入。
矩阵理论在这里的应用包括但不限于:
- 线性代数:解耦合、特征值和特征向量的计算。
- 矩阵运算:包括矩阵求逆、矩阵乘法、行列式计算等。
- 系统稳定性分析:特征根的位置对于判断系统稳定性至关重要。
3.1.2 特征值和特征向量的计算与意义
特征值和特征向量是分析系统动态行为的关键概念。对于矩阵( A ),如果存在标量( \lambda )和非零向量( v ),使得:
[ Av = \lambda v ]
则( \lambda )被称为( A )的特征值,( v )是对应的特征向量。特征值的计算有助于了解系统模态特性,而特征向量则提供了模态形状或振型。
在状态空间模型中,系统矩阵( A )的特征值对于判定系统的行为至关重要:
- 系统稳定性:如果所有特征值的实部均为负,则系统是稳定的。
- 系统频率响应:特征值的虚部与系统的固有频率有关。
- 模态分析:特征向量描述了系统模态的形状,对于振动分析等非常关键。
具体来说,计算特征值和特征向量可以使用数值方法,如QR算法或幂法等,也可以通过符号计算工具,例如MATLAB中的eig函数:
- A = [...]; % 定义矩阵A
- [V, D] = eig(A); % 计算特征值(D的对角线元素)和特征向量(V的列)
以上代码块展示了在MATLAB环境下,如何求解矩阵( A )的特征值和特征向量。其中,矩阵( A )被定义为状态空间模型的系统矩阵,而eig函数返回特征值矩阵( D )和特征向量矩阵( V )。在工程实践中,这些信息可以用于进一步的系统设计和分析。
4. 控制系统优化策略
在现代控制工程中,优化策略是保证系统性能达到预定标准的关键。控制系统设计的目标不仅仅是确保系统的稳定性,还在于通过精心设计的策略提升系统的响应速度、准确度和鲁棒

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
相关推荐
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )

专栏目录
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
内网Kubernetes集群存储解决方案:揭秘本地磁盘与网络存储的应用
【ES7243芯片低功耗设计指南】:延长设备续航的4大关键技术
DVE数据备份与恢复策略:保证数据安全:数据安全的终极指南
【天气风险建模的利器】:Copula模型与MATLAB应用案例
【Fullprof全攻略】:界面、功能与高级应用,全角度剖析
【缓存加速:响应速度倍增策略】:12306系统性能提升秘诀
【光纤与光缆技术指南】:深入解析与通信应用实践
【信令分析专家】:TDD-LTE数据捕获与分析的高级技巧


专栏目录
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )





















