SDIO 4.0多线程数据传输:速度与效率的提升秘籍
发布时间: 2024-12-17 11:55:47 阅读量: 3 订阅数: 3 

SDIO4.0协议英文版本
参考资源链接:[SDIO 4.0 Spec: 完整高清PDF,含书签,Realtek下载](https://wenku.csdn.net/doc/6412b461be7fbd1778d3f66c?spm=1055.2635.3001.10343)
# 1. SDIO技术基础与4.0标准概述
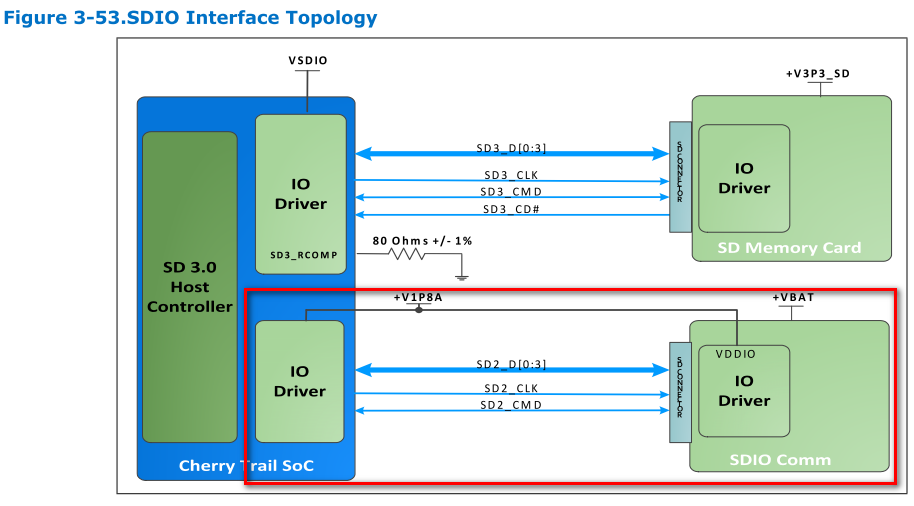
SDIO(Secure Digital Input and Output)是一种通用接口标准,广泛应用于移动设备和嵌入式系统中。SDIO 4.0作为SDIO的最新标准,旨在解决日益增长的数据传输需求,特别是在高速数据传输场景下。SDIO 4.0标准通过引入多线程传输策略和改进的传输协议,显著提升了数据传输的速率和效率。本章将对SDIO技术的基础知识进行介绍,并详细探讨SDIO 4.0的技术标准和其带来的性能优势。通过分析标准的特性,我们可以更好地理解多线程在SDIO 4.0中的作用和优化路径。
# 2. 多线程编程原理与实践
## 2.1 多线程编程基础
### 2.1.1 线程的概念和生命周期
线程是操作系统能够进行运算调度的最小单位,它被包含在进程之中,是进程中的实际运作单位。一个进程可以拥有多个线程,每个线程都各自占用资源,拥有独立的执行序列,并能独立调度执行。线程的生命周期包括创建、就绪、运行、阻塞和终止五个状态。
创建状态:线程被创建时,但尚未启动时的状态。
就绪状态:线程具备运行条件,等待系统分配CPU时间片。
运行状态:获得CPU时间片后,线程开始运行。
阻塞状态:线程因为某种原因放弃CPU使用权,暂时停止运行。
终止状态:线程完成任务或者其他终止条件出现时,进入终止状态。
理解线程的生命周期对于管理线程的行为和性能至关重要。开发者可以使用特定的API来控制线程从一个状态转换到另一个状态。
### 2.1.2 同步机制和线程安全
在多线程编程中,同步机制是保证线程安全的重要手段。线程安全是指在多线程环境下,对共享资源的访问是安全的,不会出现数据不一致的情况。常见的同步机制有互斥锁(Mutex)、读写锁(Read-Write Lock)、信号量(Semaphore)等。
互斥锁(Mutex)是一种简单的同步机制,它能够保证在任何时刻只有一个线程可以访问资源。当一个线程获取到锁后,其他线程必须等待,直到锁被释放。
```c
#include <pthread.h>
pthread_mutex_t lock;
void* thread_function(void* arg) {
pthread_mutex_lock(&lock); // 获取锁
// 访问共享资源
pthread_mutex_unlock(&lock); // 释放锁
return NULL;
}
int main() {
pthread_t thread_id;
pthread_mutex_init(&lock, NULL); // 初始化互斥锁
pthread_create(&thread_id, NULL, thread_function, NULL);
pthread_join(thread_id, NULL); // 等待线程结束
pthread_mutex_destroy(&lock); // 销毁互斥锁
return 0;
}
```
在使用互斥锁时,需要确保在访问共享资源前获取锁,操作完成后释放锁。若未正确管理锁的生命周期,将可能导致死锁或者资源无法被正确释放。
## 2.2 多线程在数据传输中的应用
### 2.2.1 线程模型与数据传输效率
线程模型的选择直接影响数据传输的效率。在数据传输中,常见的线程模型有基于事件的模型、基于线程池的模型以及直接使用新线程的模型。基于事件的模型适用于I/O密集型任务,而基于线程池的模型则适合于计算密集型任务,能够有效复用线程资源,减少线程创建和销毁的开销。
### 2.2.2 实际案例分析:多线程提升传输速度
以一个简单的文件上传服务为例,我们可以通过多线程同时处理多个文件上传请求,从而提高整体的上传速度。假设我们有一个服务端,需要处理来自客户端的文件上传请求,下面是一个简单的服务端代码框架:
```c
void handle_upload_connection(int socket) {
// 处理文件上传逻辑...
// 在不同的线程中处理不同文件的上传
}
int main() {
int server_fd, client_socket;
struct sockaddr_in server_addr, client_addr;
pthread_t thread_id;
// 初始化服务器地址和端口
server_fd = socket(AF_INET, SOCK_STREAM, 0);
bind(server_fd, (struct sockaddr*)&server_addr, sizeof(server_addr));
listen(server_fd, 10); // 监听端口
while (1) {
socklen_t client_len = sizeof(client_addr);
client_socket = accept(server_fd, (struct sockaddr*)&client_addr, &client_len);
if (pthread_create(&thread_id, NULL, (void*)handle_upload_connection, (void*)client_socket) != 0) {
// 错误处理
}
pthread_detach(thread_id); // 线程独立运行
}
close(server_fd);
return 0;
}
```
在这个案例中,每当有新的文件上传请求到达时,服务端都会创建一个新的线程来处理该请求。这样可以确保服务端能够并行处理多个请求,显著提升数据传输的效率。当然,在实际应用中还需要考虑资源限制、线程管理和异常处理等问题。
## 2.3 多线程编程高级技术
### 2.3.1 线程池的实现与应用
线程池是一种多线程处理形式,它预先创建一定数量的线程放在池中,这些线程可以用来执行后续提交的线程任务。使用线程池可以减少在多线程执行中频繁创建和销毁线程的开销,提升性能。
线程池的实现通常包括几个核心组件:工作线程集合、任务队列、线程管理器以及执行策略。线程池通过工作线程循环从任务队列中取出任务执行,而线程管理器负责管理线程的生命周期以及执行策略的执行。
```c
// 线程池的简单实现
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <unistd.h>
#define THREAD_POOL_SIZE 5
typedef struct {
pthread_t *threads;
pthread_mutex_t queue_mutex;
pthread_cond_t queue_ready;
void **task_queue;
int queue_size;
int front;
int rear;
int task_count;
} ThreadPool;
void* thread_routine(void* arg) {
ThreadPool* pool = (ThreadPool*)arg;
void* task;
while (1) {
pthread_mutex_lock(&(pool->queue_mutex));
while (pool->task_c
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 SDIO 4.0 规范标准高清 PDF 专栏!本专栏为您提供一系列全面而深入的文章,为您提供新一代 SDIO 接口协议的权威指南。
从深入了解 SDIO 4.0 的技术细节到探索其在移动设备性能升级中的关键作用,再到分析其与 NFC 技术的融合趋势,我们的文章涵盖了 SDIO 4.0 的各个方面。此外,我们还提供了实战攻略,指导您将 SDIO 4.0 无缝集成到现有系统中,以及从零开始构建稳定驱动的详细指南。
无论您是工程师、开发人员还是对 SDIO 4.0 感兴趣的任何人,本专栏都将为您提供您所需的知识和见解,以充分利用这一创新技术。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【地震波成像技术】:揭秘FK分析在波场映射中的惊人作用

参考资源链接:[Lupei Zhu教授的FK工具包:水平分层模型格林函数计算与地震图合成教程](https://wenku.csdn.net/doc/6412b70abe7fbd1778d48e0d?spm=1055.2635.3001.10343)
# 1. 地震波成像技术概述
## 1.1 地震波成像技术简介
地震波成像技
CAM350故障排除速成:开短路问题的快速诊断与解决法
参考资源链接:[CAM350检查开短路](https://wenku.csdn.net/doc/6469cf105928463033e20285?spm=1055.2635.3001.10343)
# 1. CAM350软件与PCB开短路问题概述
在现代电子制造领域,电路板(PCB)是几乎所有电子
【专家视角】SONY IMX 178高速成像性能评测:性能优化的秘密武器

参考资源链接:[索尼IMX178:高性能CMOS图像传感器技术解析](https://wenku.csdn.net/doc/2e2hfcxefh?spm=1055.2635.3001.10343)
# 1. SONY IMX 178高速成像传感器概述
SONY IMX 178是一款具有
空间分析与数据处理技巧:Geomatica 2020高级功能深度探索
参考资源链接:[PCI Geomatica2020中文用户手册:从入门到精通](https://wenku.csdn.net/doc/32ehwsi2un?spm=1055.2635.3001.10343)
# 1. Geomatica 2020概览与基础应用
随着地理信息系统(GIS)技术的快速发展,Geomatica 2020作为一款强
【C#新手必看】:ListBox控件字体颜色个性化设置完全手册
参考资源链接:[C# ListBox 中指定行字体颜色修改教程](https://wenku.csdn.net/doc/5a83kp9z0v?spm=1055.2635.3001.10343)
# 1. ListBox控件简介与应用基础
## 概述
ListBox控件是许多软件开发平台中不可或缺的元素,尤其在需要展示可选择列表的场景中。它为用户界面提供了基础的交互方式,支持垂直或水
SP Flash Tool 高级使用指南:定制化刷机流程与技巧
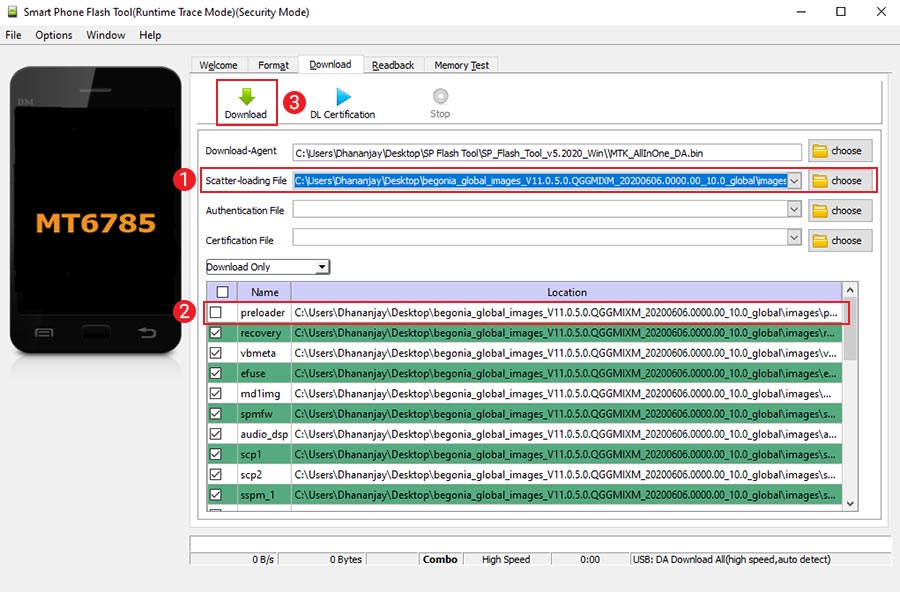
参考资源链接:[SPFlashTool刷机教程:步骤详解与注意事项](https://wenku.csdn.net/doc/6412b4d8be7fbd1778d41068?spm=1055.2635.3001.10343)
# 1. SP Flash Tool概述
【HFSS 3D Layout性能优化】:快速调整布局的4种方法,提升效率

参考资源链接:[HFSS 3D Layout用户手册:全面指南](https://wenku.csdn.net/doc/6412b6edbe7fbd1778d48793?spm=1055.2635.3001.10343)
# 1. HFSS 3D Layout简介与性能挑战
## 1.1 HFSS 3D Lay
【HDMI音频技术深度解析】:不同版本音频传输能力的全面评估
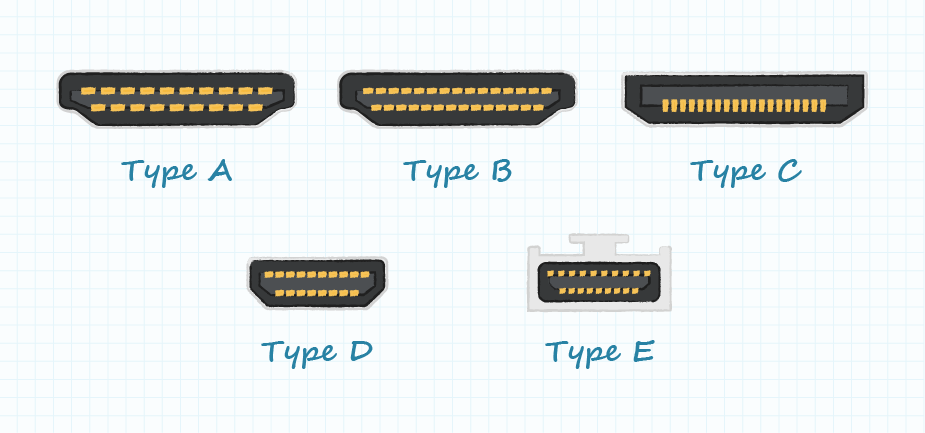
参考资源链接:[HDMI各版本详解:1.3a至2.0技术飞跃与差异对比](https://wenku.csdn.net/doc/6460bc8e5928463033af8f6e?spm=1055.2635.3001.10343)
# 1. HDMI音频技术概述
HDMI(High-Definition Multimedia Interface)不仅已成为高清视频传输的标准接口,而且在音频传输方面也扮演着至关重要的角色。它通过单一的电缆连接,
汇川MD310变频器:维护与保养的5大黄金法则
参考资源链接:[汇川MD310系列变频器用户手册:功能特性与使用指南](https://wenku.csdn.net/doc/8bnnqnnceg?spm=1055.2635.3001.10343)
# 1. 汇川MD310变频器概述
## 1.1 MD310变频器的简介
汇川MD310变频器是一款在工业自动化领域广泛应用的电力控制设备。它是通过改变供电频率与电压来控制电动机转速的装置,从而达到提高电能使用效率和
Fanuc PLC编程黄金法则:打造高效的自动化流程
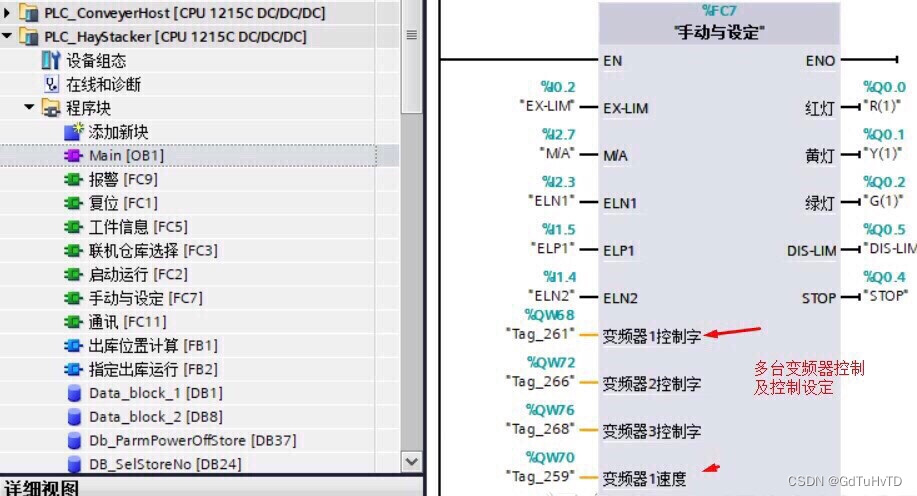
参考资源链接:[FANUC机器人自动运行设置详解:RSR与PNS启动](https://wenku.csdn.net/doc/12rv1nsph5?spm=1055.2635.3001.10343)
# 1. Fanuc PLC编程概述
在自动化控制系统领域,Fanuc PLC(可编程逻辑控制器)已经成为标准设备。本章旨在为读者提供一个对Fanuc PLC编程的总体认识。我们将从PLC
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )