单片机交通灯程序性能提升秘籍:优化算法,提升响应速度
发布时间: 2024-07-08 14:44:09 阅读量: 55 订阅数: 26 

毕业设计论文单片机控制交通灯.doc

# 1. 单片机交通灯程序概述
交通灯控制程序是单片机系统中常见的应用,用于控制交通信号灯的切换。本章将概述单片机交通灯程序的基本原理和功能。
### 1.1 交通灯控制算法
交通灯控制算法是程序的核心部分,它决定了交通灯的切换顺序和时间。传统算法通常采用循环计数的方式,通过定时器中断来控制灯的切换。优化算法则可以根据交通流量和路况进行动态调整,提高交通效率。
### 1.2 程序结构
单片机交通灯程序通常由以下模块组成:
- **初始化模块:**初始化单片机、外围器件和数据结构。
- **控制模块:**根据算法控制交通灯的切换。
- **输入模块:**处理来自传感器(如压力传感器、摄像头)的输入信号。
- **输出模块:**控制交通灯的显示和执行器(如蜂鸣器)的输出。
# 2. 交通灯控制算法优化
### 2.1 传统算法分析
#### 2.1.1 算法流程和时间复杂度
传统交通灯控制算法通常采用有限状态机(FSM)模型,其流程如下:
```mermaid
graph LR
subgraph 左转状态
A[绿灯] --> B[黄灯]
B[黄灯] --> C[红灯]
end
subgraph 直行状态
D[绿灯] --> E[黄灯]
E[黄灯] --> F[红灯]
end
subgraph 右转状态
G[绿灯] --> H[黄灯]
H[黄灯] --> I[红灯]
end
```
该算法的时间复杂度为 O(1),因为每个状态转换都是一个常量时间操作。
### 2.2 优化算法设计
#### 2.2.1 算法原理和实现方式
为了优化传统算法,我们引入了一种基于优先级的算法。该算法根据车辆流量和等待时间为每个方向分配优先级。
```python
def get_priority(direction):
"""
获取方向的优先级。
参数:
direction: 方向(左转、直行或右转)
返回:
优先级(数字越大,优先级越高)
"""
if direction == "left":
return 3
elif direction == "straight":
return 2
else:
return 1
def update_traffic_lights(traffic_data):
"""
根据交通数据更新交通灯状态。
参数:
traffic_data: 交通数据(车辆流量和等待时间)
"""
# 计算每个方向的优先级
left_priority = get_priority("left")
straight_priority = get
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏致力于提供单片机交通灯程序设计全面的指导,涵盖从零基础到实战的各个方面。通过深入分析交通灯工作原理,读者将掌握单片机交通灯控制逻辑。专栏还提供了详细的程序调试和移植指南,确保稳定运行和跨平台开发。此外,还探讨了智能算法的融入、真实场景下的设计与实现、性能提升秘籍、可维护性指南、可靠性保障、成本优化指南、设计模式、代码优化指南、测试策略、文档编写指南、版本管理指南、团队协作指南、需求分析指南和系统设计指南。通过阅读本专栏,读者将获得设计、开发和维护单片机交通灯程序所需的全面知识和技能,从而打造智能高效的交通管理系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【从零开始学Verilog】:如何在Cadence中成功搭建第一个项目
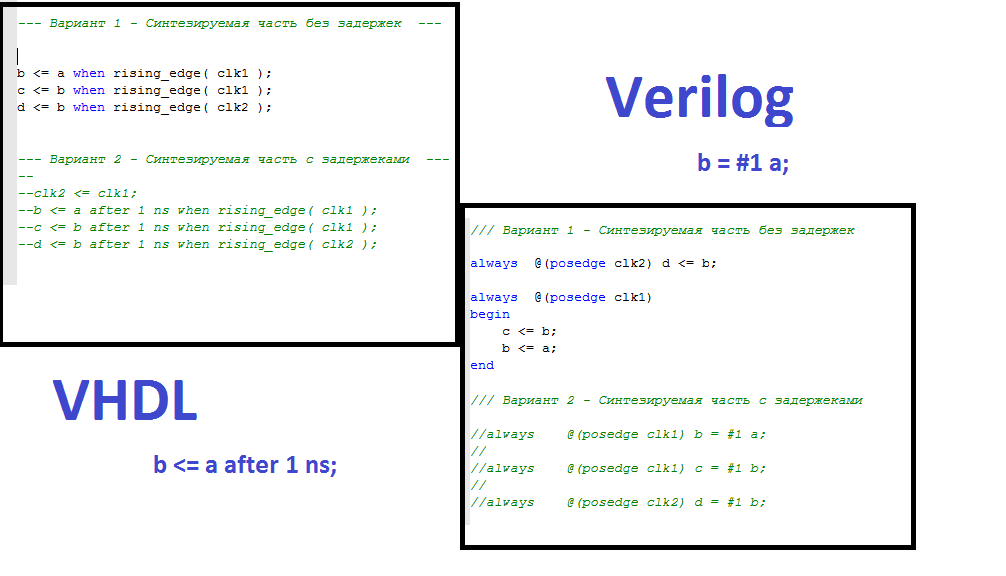
# 摘要
本文旨在提供一个全面的Verilog语言和Cadence工具使用指南,涵盖了从基础入门到项目综合与仿真的深入应用。第一章介绍了Verilog语言的基础知识,包括基本语法和结构。第二章则深入讲解了Cadence工具的使用技巧,包括界面操作、项目管理和设计库应用。第三章专注于在Cadence环境中构建和维护Verilog项目,着重讲述了代码编写、组织和集成。第四章探讨
微服务架构精要:实现高质量设计与最佳实践
# 摘要
微服务架构作为一种现代化的软件开发范式,以其模块化、灵活性和可扩展性优势正逐渐成为企业级应用开发的首选。本文从基本概念入手,深入探讨了微服务的设计原则与模式、持续集成和部署策略、以及安全、测试与优化方法。通过对微服务架构模式的详细介绍,如API网关、断路器、CQRS等,文章强调了微服务通信机制的重要性。同时,本文还分析了微服务在持续集成和自动化部署中的实践,包括容器化技术的应用和监控、日志管理。此
【快速定位HMI通信故障】:自由口协议故障排查手册

# 摘要
自由口协议作为工业通信中的关键组件,其基础、故障定位及优化对于保证系统的稳定运行至关重要。本文首先介绍了自由口协议的基本原理、标准与参数配置以及数据包结构,为理解其工作机制奠定基础。接着,详细阐述了自由口协议故障排查技术,包括常见故障类型、诊断工具与方法及解
C语言内存管理速成课:避开动态内存分配的坑
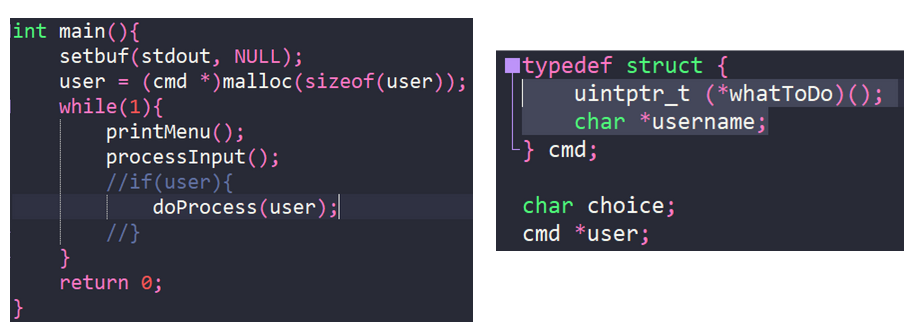
# 摘要
C语言作为经典的编程语言,其内存管理机制对程序的性能和稳定性具有决定性影响。本文首先概述了C语言内存管理的基础知识,随后深入探讨了动态内存分配的原理、使用技巧及常见错误。通过案例分析,本文进一步实践了内存管理在实际项目中的应用,并讨论了内存分配的安全性和优化策略。本文还涵盖了高级内存管理技术,并展望了内存管理技术的发展趋势和新兴技术的应用前景。通
【招投标方案书的语言艺术】:让技术文档更具说服力的技巧

# 摘要
本文探讨了招投标方案书撰写过程中的语言艺术及结构设计。重点分析了技术细节的语言表达技巧,包括技术规格的准确描述、方案的逻辑性和条理性构建、以及提升语言说服力的方法。接着,文章详细介绍了招投标方案书的结构设计,强调了标准结构和突出技术展示的重要性,以及结尾部分总结与承诺的撰写技巧。此外,本文还提供了写作实践的案例分析和写作技巧的演练,强调了与甲方沟通与互动的重要性,包括沟通技巧、语言策略和后续跟进调整。最后
【效能对比】:TAN时间明晰网络与传统网络的差异,新一代网络技术的效能评估
.jpg)
# 摘要
时间明晰网络作为新型网络架构,提供了比传统网络更精准的时间同步和更高的服务质量(QoS)。本文首先概述了时间明晰网络的基本概念、运作机制及其与传统网络的对比优势。接着,文章深入探讨了实现时间明晰网络的关键技术,包括精确时间协议(PTP)、网络时间协议(NTP)和时间敏感网络(TSN)技术等。通过对工业自动化
【UDS错误代码秘密解读】:专家级分析与故障排查技巧

# 摘要
统一诊断服务(UDS)协议是汽车行业中用于诊断和通信的国际标准,其错误代码机制对于检测和解决车载系统问题至关重要。本文首先概述了UDS协议的基础知识,包括其架构和消
【RTX 2080 Ti性能调优技巧】:硬件潜力全挖掘
/i.s3.glbimg.com/v1/AUTH_08fbf48bc0524877943fe86e43087e7a/internal_photos/bs/2021/8/v/dscSt1S7GuYFTJNrIH0g/2017-03-01-limpa-2.png)
# 摘要
本文全面概述了RTX 2080 Ti显卡的架构特点及其性能
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )