模糊控制系统原理、实现及应用:基于单片机
发布时间: 2024-07-14 21:50:44 阅读量: 45 订阅数: 29 
# 1. 模糊控制系统原理
模糊控制系统(FCS)是一种基于模糊逻辑的控制系统,它能够处理不确定性和模糊性。FCS 的基本原理包括:
- **模糊化:**将输入变量转换为模糊变量,模糊变量具有模糊值,如“小”、“中”、“大”。
- **模糊规则:**定义一组模糊规则,这些规则描述了系统在不同输入条件下的行为。
- **推理:**根据模糊规则和输入模糊变量,推导出输出模糊变量。
- **反模糊化:**将输出模糊变量转换为确定的控制输出。
FCS 的优势在于它能够处理非线性、不确定性和复杂系统,在许多领域都有广泛的应用,如电机控制、温度控制和图像处理。
# 2.1 单片机模糊控制系统硬件设计
### 2.1.1 单片机选型和外围电路设计
单片机模糊控制系统硬件设计中,单片机选型和外围电路设计至关重要。
**单片机选型**
单片机的选择应考虑以下因素:
- **性能要求:**模糊控制算法的计算量和实时性要求。
- **存储空间:**模糊规则库、推理机制和控制算法所需的存储空间。
- **外围接口:**与传感器、执行器和其他外围设备连接所需的接口。
- **成本和功耗:**应用场景对成本和功耗的限制。
**外围电路设计**
外围电路设计包括:
- **传感器接口:**将传感器信号转换为单片机可处理的数字信号。
- **执行器接口:**将单片机控制信号转换为执行器可执行的动作。
- **电源电路:**为单片机和外围电路提供稳定的电源。
- **复位电路:**在系统异常时复位单片机。
### 2.1.2 传感器和执行器接口设计
传感器和执行器是模糊控制系统与物理世界的接口。
**传感器接口设计**
传感器接口设计应考虑:
- **传感器类型:**不同传感器具有不同的信号特性,需要不同的接口电路。
- **信号调理:**传感器信号可能需要放大、滤波或转换,以符合单片机输入要求。
- **抗干扰措施:**传感器信号容易受到噪声和干扰的影响,需要采取抗干扰措施。
**执行器接口设计**
执行器接口设计应考虑:
- **执行器类型:**不同执行器具有不同的控制方式,需要不同的接口电路。
- **驱动电路:**单片机输出信号可能无法直接驱动执行器,需要驱动电路放大或转换信号。
- **保护措施:**执行器可能产生高电压或电流,需要采取保护措施防止损坏单片机。
# 3. 模糊控制系统实践应用
### 3.1 单片机模糊控制系统在电机控制中的应用
#### 3.1.1 电机控制系统设计
电机控制系统是一个典型的非线性系统,其控制目标是根据给定的参考速度或位置,控制电机的速度或位置,实现精确的运动控制。模糊控制由于其对非线性系统建模的优势,在电机控制中得到了广泛的应用。
单片机模糊控制系统在电机控制中的应用主要包括以下几个方面:
- **速度控制:**通过模糊控制算法调整电机的转速,实现电机速度的稳定和准确控制。
- **位置控制:**通过模糊控制算法控制电机的转动角度,实现电机位置的精确控制。
- **转矩控制:**通过模糊控制算法控制电机的转矩,实现电机输出力矩的平稳和准确控制。
#### 3.1.2 模糊控制算法设计与实现
电机控制系统中模糊控制算法的设计主要包括以下步骤:
1. **确定输入和输出变量:**根据电机控制系统的具体要求,确定模糊控制算法的输入变量(如速度误差、位置误差等)和输出变量(如控制量等)。
2. **设计模糊化器:**将输入变量和输出变量进行模糊化处理,将其转换为模糊语言变量。
3. **设计规则库:**根据电机的控制规律和专家经验,建立模糊规则库。规则库中包含了输入变量和输出变量之间的模糊关系。
4. **设计推理机制:**根据模糊规则库和输入变量的模糊值,进行模糊推理,得到输出变量的模糊值。
5. **设计反模糊化器:**将输出变量的模糊值转换为确定的控制量。
#### 3.1.3 实验结果分析
为了验证模糊控制算法在电机控制中的有效性,可以进行实验验证。实验结果表明,模糊控制算法能够有效地控制电机的速度、位置和转矩,实现精确的运动控制。
### 3.2 单片机模糊控制系统在温度控制中的应用
#### 3.2.1 温度控制系统设计
温度控制系统是一个典型的非线性系统,其

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏全面解析了基于单片机的控制系统设计、实现和应用。从需求分析到系统实现,从硬件设计到软件开发,从传感器选型到电机驱动,从实时操作系统到通信协议,从性能分析到稳定性分析,从安全设计到智能家居、医疗器械和工业 4.0 领域的应用,该专栏提供了全面的指南和深入的见解。此外,还涵盖了模糊控制、神经网络控制和图像识别控制等高级控制技术,以及基于单片机的实现和应用。通过深入浅出的讲解和丰富的案例,本专栏旨在帮助工程师和开发者掌握单片机控制系统设计的精髓,并将其应用于各种实际应用中。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
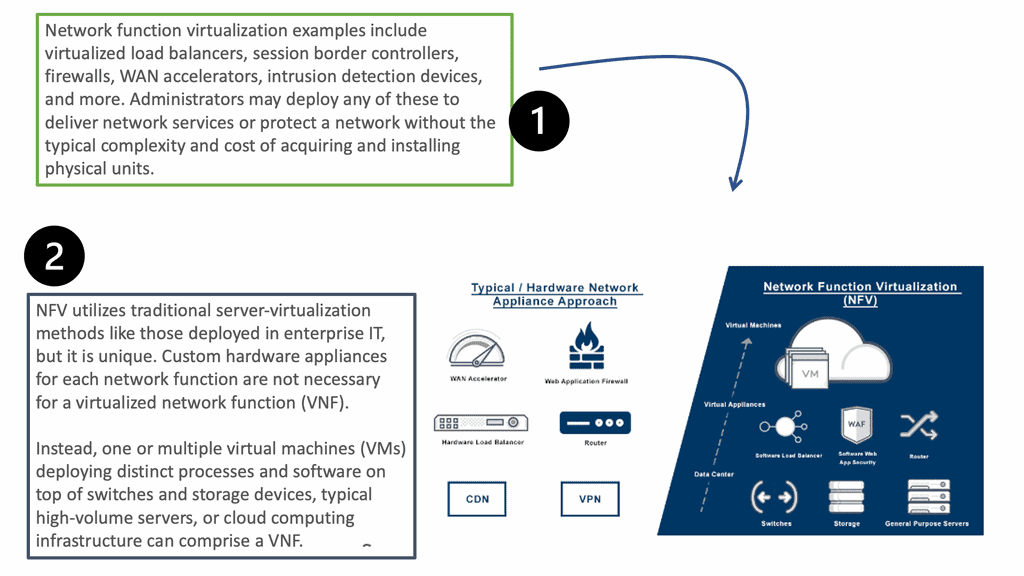
绿色计算新篇:AMI VeB白皮书中的虚拟化技术革新
参考资源链接:[VeB白皮书:AMIVisual eBIOS图形固件开发环境详解](https://wenku.csdn.net/doc/6412b5cabe7fbd1778d44684?spm=1055.2635.3001.10343)
# 1. 虚拟化技术的演进与绿色计算的兴起
## 1.1 虚拟化技术的历史演进
虚拟化技术的起源可以追溯到20世纪60年代的IBM大型机,它使得一台物理主机能
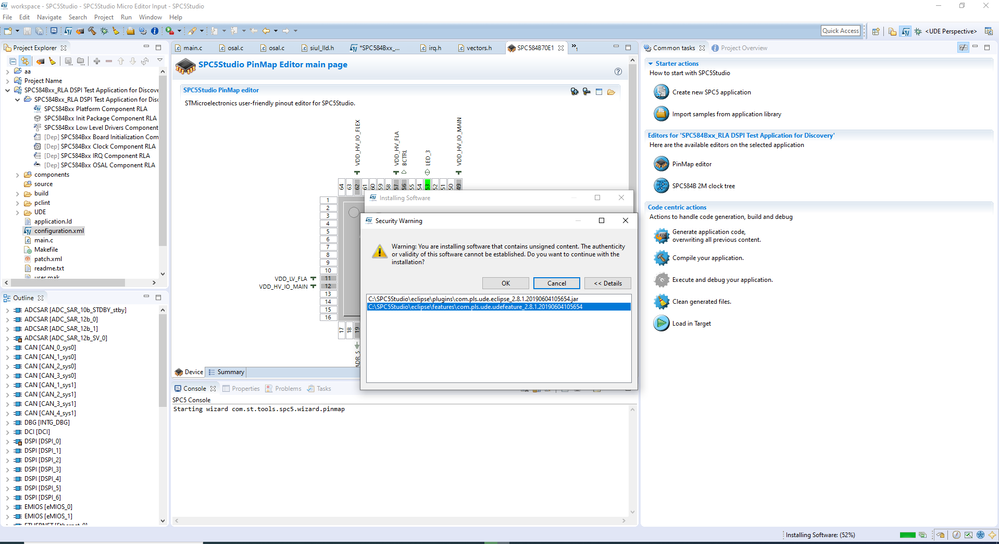
PLS UDE UAD扩展功能探索:插件与模块使用深度解析
参考资源链接:[UDE入门:Tricore多核调试详解及UAD连接步骤](https://wenku.csdn.net/doc/6412b6e5be7fbd1778d485ca?spm=1055.2635.3001.10343)
# 1. PLS UDE UAD基础介绍
在当今充满活力的信息技术领域,PLS UDE
V90 EPOS模式回零适应性:极端环境下的稳定运行分析

参考资源链接:[V90 EPOS模式下增量/绝对编码器回零方法详解](https://wenku.csdn.net/doc/6412b48abe7fbd1778d3ff04?spm=1055.2635.3001.10343)
# 1. V90 EPOS模式回零的原理与必要性
## 1.1 EPOS模式回零的基本概念
EPOS(电子位置设定)模式回零是指在电子控制系统中,自动或手动将设备的位置设定到初始的或预定的位置。这种机
【奔图打印机错误代码解读】:全面解析及解决方法,让故障无所遁形
参考资源链接:[奔图打印机故障排除指南:卡纸、颜色浅、斑点与重影问题解析](https://wenku.csdn.net/doc/647841b8d12cbe7ec32e0260?spm=1055.2635.3001.10343)
# 1. 奔图打印机错误代码概述
在现代办公环境中,打印机作为重要的输出设备,其稳定性和效率直接影响工作流程。奔图(Pantum)打印机作为市场上的一个重要品牌,虽然其产品性能稳定,但也无法完全避免发生故障。错误代码是打印机在遇到问题时给出的一种直观反馈,通过解读这些代码,用户可以快速定位问题并采取相应措施解决。
本章我们将对奔图打印机错误代码进行一个概览性的介
虚拟现实集成:3DSource零件库设计体验的新维度

参考资源链接:[3DSource零件库在线版:CAD软件集成的三维标准件库](https://wenku.csdn.net/doc/6wg8wzctvk?spm=1055.2635.3001.10343)
# 1. 虚拟现实技术与3D Source概述
## 虚拟现实技术基础
虚拟现实(VR)技术通过创造三维的计算机模拟环境,让用户能够沉浸在一个与现实世界完全不同的空间。随着硬件设备
【Python pip安装包的版本控制】:精确管理依赖版本的专家指南

参考资源链接:[Python使用pip安装报错ModuleNotFoundError: No module named ‘pkg_resources’的解决方法](https://wenku.csdn.net/doc/6412b4a3be7fbd1778d4049f?spm=1055.2635.3001.10343)
# 1. Python pip安装包管理概述
P
GMW 3172-2018系统升级黄金策略:最佳实践与案例深度解析
参考资源链接:[【最新版】 GMW 3172-2018.pdf](https://wenku.csdn.net/doc/3vqich9nps?spm=1055.2635.3001.10343)
# 1. GMW 3172-2018系统升级概述
随着技术的快速发展,系统升级已成为保持企业竞争力和满足合规性要求的必要手段。GMW 3172-2018,作为一项关键行业标准,规定了系统升级必须遵循的具体要求和流程。本章节将对这一过程进行简要概述,引导读者了解升级的总体目的、范围以及它在企业技术战略中的作用。
## 1.1 系统升级的目的和重要性
系统升级不仅仅是为了增加新功能,它还涉及到性能优化
环境化学研究新工具:Avogadro模拟污染物行为实操

参考资源链接:[Avogadro中文教程:分子建模与可视化全面指南](https://wenku.csdn.net/doc/6b8oycfkbf?spm=1055.2635.3001.10343)
# 1. 环境化学研究中模拟工具的重要性
环境化学研究中,模拟工具已成为不可
Calibre XRC:扩展功能全攻略,插件和API的使用让你的设计无边界
参考资源链接:[Calibre XRC:寄生参数提取与常用命令详解](https://wenku.csdn.net/doc/6412b4d3be7fbd1778d40f58?spm=1055.2635.3001.10343)
# 1. Calibre XRC概述
在现代电子设计自动化(EDA)领域,Calibre XRC
【74HC154引脚扩展应用:高级功能探索】:超出基础使用的全新体验
参考资源链接:[74HC154详解:4线-16线译码器的引脚功能与应用](https://wenku.csdn.net/doc/32hp07jvry?spm=1055.2635.3001.10343)
# 1. 74HC154引脚扩展的概览
在现代电子设计中,74HC154作为一个常用的数字逻辑IC,在多种场景中被用来扩展引脚数量。74HC154 是一个 4 线至 16 线译码器/解复用器,它可以根据4位二进制输入信号选择16个输出中的一个,并将其激活为低电平(通常用作开关信号)。这一章,我们将简要介绍74HC154的功能和优势,为接下来的深入学习打下基础。
## 1.1 74HC154的
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )