利用MATLAB进行四元数的转换与插值处理
发布时间: 2024-04-06 12:10:43 阅读量: 207 订阅数: 34 

利用MATLAB软件进行插值计算
# 1. 四元数简介
四元数作为一种数学工具,具有独特的性质和广泛的应用。本章将介绍四元数的基本概念以及在计算机图形学领域中的重要性。
### 1.1 什么是四元数?
四元数是一种扩展了复数的数学结构,由一个实部和三个虚部组成,通常表示为$q = a + bi + cj + dk$,其中$i, j, k$是虚数单位,并满足如下关系:
$i^2 = j^2 = k^2 = ijk = -1$
四元数广泛应用于旋转、姿态控制、动画插值等领域,其具备很多独特的数学性质。
### 1.2 四元数的基本概念与表示方法
在四元数中,实部通常表示旋转角度的余弦值,而虚部$(bi + cj + dk)$表示旋转轴的三个分量乘旋转角度的正弦值。四元数具有单位四元数、共轭四元数、逆四元数等重要概念。
### 1.3 四元数在计算机图形学中的应用
四元数在计算机图形学中被广泛应用于姿态表示、相机控制、动画插值等方面。其旋转方式具有高效性和稳定性,被认为是一种优秀的旋转表示方法。
通过本章的介绍,读者将对四元数有一个初步的认识,为后续章节中的具体操作打下基础。
# 2. MATLAB中的四元数操作
在MATLAB中,四元数被广泛用于处理旋转、姿态控制等问题。本章将介绍MATLAB中的四元数数据类型以及基本的四元数操作方法。
### 2.1 MATLAB中的四元数数据类型
MATLAB中通过 `quaternion` 类型来表示四元数。通过这个数据类型,我们可以方便地进行四元数的定义、运算和转换。
```matlab
% 创建四元数
q1 = quaternion(1, 2, 3, 4); % 以实部和虚部分别为1,2,3,4创建四元数
q2 = quaternion(cos(pi/4), [0 1 0]*sin(pi/4)); % 利用欧拉角创建四元数
% 显示四元数内容
disp('四元数q1:');
disp(q1);
disp('四元数q2:');
disp(q2);
```
### 2.2 基本四元数操作:加法、减法、乘法、除法
在MATLAB中,我们可以通过四元数的运算方法来执行加法、减法、乘法和除法等操作。
```matlab
% 定义两个四元数
q1 = quaternion(1, 2, 3, 4);
q2 = quaternion(5, -1, 2, -3);
% 四元数加法
q_add = q1 + q2;
disp('四元数相加结果:');
disp(q_add);
% 四元数乘法
q_mult = q1 * q2;
disp('四元数相乘结果:');
disp(q_mult);
```
### 2.3 四元数的单位化与共轭运算
在四元数计算中,常常需要进行单位化和共轭运算来满足计算需求。
```matlab
% 单位化操作
q = quaternion(0, 1, 1, 1);
q_normalized = normalize(q); % 单位化四元数
disp('单位化后的四元数:');
disp(q_normalized);
% 共轭运算
q_conj = conj(q); % 四元数共轭
disp('四元数的共轭:');
disp(q_conj);
```
通过以上示例,我们可以看到在MATLAB中如何进行基本的四元数操作,包括加法、乘法、单位化和共轭运算。这些操作为接下来的四元数转换与插值处理奠定了基础。
# 3. 四元数的转换处理
在这一章中,我们将深入探讨四元数的转换处理,包括欧拉角与四元数的相互转换、旋转矩阵与四元数的转换关系以及利用MATLAB实现四元数的旋转变换处理。通过对四元数的转换处理,我们可以更灵活地实现旋转与变换操作。
#### 3.1 欧拉角与四元数的相互转换
欧拉角是描述物体在空间中旋转姿态的一种方式,通常用三个角度表示。而四元数则提供了更加有效的旋转表示方法,可以避免万向节锁等问题。在MATLAB中,我们可以通过一定的计算方法实现欧拉角与四元数之间的相互转换。
```Matlab
% 欧拉角转四元数示例
% 定义欧拉角表示的旋转
roll = 45; % 绕X轴旋转角度
pitch = 30; % 绕Y轴旋转角度
yaw = 60; % 绕Z轴旋转角度
% 将欧拉角转换为四元数
rotMatrix = eul2rotm(deg2rad([yaw, pitch, roll])); % 将欧拉角转换为旋转矩阵
quaternion = quaternion(rotMatrix); % 利用旋转矩阵生成对应的四元数
disp('转换后的四元数为:');
disp(quaternion);
```
通过以上代码示例,我们可以实现欧拉角到四元数的转换,进而应用于旋转等操作中。
#### 3.2 旋转矩阵与四元数的转换关系
旋转矩阵是描述旋转变换的一种常用方法,而四元数与旋转矩阵之间存在一定的对应关系。在MATLAB中,我们可以通过相应的函数实现旋转矩阵与四元数之间的转换。
```Matlab
% 旋转矩阵转四元数示例
% 定义旋转矩阵
rotMatrix = [0.866, -0.5, 0; 0.5, 0.866, 0; 0, 0, 1]; % 逆时针绕Z轴旋转30度的旋转矩阵
% 将旋转矩阵转换为四元数
quaternion = quaternion(rotMatrix); % 利用旋转矩阵生成对应的四元数
disp('转换后的四元数为:');
disp(quaternion);
```
通过以上代码示例,我们可以实现旋转矩阵到四元数的转换,为后续旋转变换操作提供了便利。
#### 3.3 MATLAB实现四元数的旋转变换处理
利用MATLAB,我们可以方便地实现对四元数的旋转变换处理,从而实现物体的旋转、变换等操作。下面是一个简单的示例代码,展示了如何利用四元数进行旋转变换。
```Matlab
% 四元数旋转变换示例
% 定义初始向量
v = [1, 0, 0];
% 定义旋转四元数
q = quaternion(cos(pi/4), [0, 0, sin(pi/4)]);
% 进行四元数旋转变换
rotated_v = rotatepoint(q, v);
disp('经四元数旋转后的向量为:');
disp(rotated_v);
```
通过以上代码示例,我们可以看到利用四元数进行旋转变换的简便操作,实现了向量的旋转变换。这为在实际场景中应用四元数提供了便利。
通过学习与掌握四元数的转换处理,可以更好地理解与应用四元数在计算机图形学等领域中的作用,为实现更加灵活的旋转与变换操作打下基础。
# 4. 四元数的插值方法
在本章中,我们将探讨四元数的插值方法,包括线性插值与球面线性插值的介绍,基于四元数的插值算法原理,以及如何利用MATLAB实现四元数的插值处理。让我们深入了解四元数插值在计算机图形学和动画开发中的重要性和应用价值。
# 5. 四元数在动画与游戏开发中的应用
- 5.1 四元数在动画插值与运动平滑中的应用
- 5.2 利用四元数实现相机控制与视角变换
- 5.3 实例分析:MATLAB中四元数在游戏开发中的应用案例
# 6. 四元数的高级应用与拓展
在四元数的应用领域中,除了基本的转换和插值处理外,还存在着许多高级的应用和拓展。本章将深入探讨四元数的高级技巧和拓展应用,帮助读者更全面地理解四元数在计算机图形学和其他领域中的潜力。
#### 6.1 四元数插值的进阶技巧与优化策略
在四元数插值过程中,为了获得更加平滑和真实的动画效果,可以采用一些进阶技巧和优化策略。其中的一种常见方法是球面样条插值(Slerp),它可以确保在插值过程中保持单位化,并且在旋转过程中速度是恒定的,避免了插值路径的突变。
下面以Python代码为例,演示如何使用Slerp方法进行四元数插值:
```python
import numpy as np
from scipy.spatial.transform import Rotation
# 定义起始四元数
q_start = np.array([1, 0, 0, 0])
# 定义结束四元数
q_end = np.array([0.5, 0.5, 0.5, 0.5])
# 计算插值比例
t = 0.5
# 进行球面样条插值
interp_q = Rotation.from_quat(q_start).slerp(Rotation.from_quat(q_end), t).as_quat()
print("插值后的四元数:", interp_q)
```
通过使用球面样条插值方法,我们可以在起始四元数和结束四元数之间以平滑的方式进行插值,得到更加自然的过渡效果。
#### 6.2 高级四元数操作:路径规划、物体碰撞检测等应用
除了基本的旋转变换和插值处理,四元数还可以应用于一些高级计算领域,如路径规划和物体碰撞检测。在机器人领域,四元数常用于描述机器人的姿态状态,通过四元数运动规划可以实现更加灵活和高效的路径规划;同时,利用四元数碰撞检测算法,可以帮助机器人或物体在复杂环境中避免碰撞,保证运动安全。
#### 6.3 探索四元数在机器人学、虚拟现实等领域的潜在应用
随着人工智能、虚拟现实和增强现实等技术的快速发展,四元数在机器人学、虚拟现实等领域也展现出了巨大的潜力。未来,我们可以进一步探索四元数在这些领域的应用,结合深度学习、传感器技术等,开发出更加智能和逼真的系统和应用。
通过深入研究四元数的高级应用和拓展,我们可以更好地理解四元数的数学原理和实际应用,为未来的科研和工程实践提供更加丰富和多样的可能性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以 MATLAB 为平台,深入探讨四元数及其在各种领域的应用。文章涵盖了四元数的基本概念、运算和转换,以及在几何旋转、插值处理、三维动画、机器人运动学建模、姿态控制、传感器融合、虚拟现实、图形处理和可视化等领域的应用。通过 MATLAB 的强大计算能力和直观的编程环境,专栏提供了详细的示例和代码,帮助读者理解和掌握四元数在实际应用中的强大功能。无论你是工程、计算机科学还是其他相关领域的专业人士,本专栏都能为你提供宝贵的见解和实用的知识,让你充分利用四元数的优势,解决复杂的问题并实现创新解决方案。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【多通道信号处理概述】:权威解析麦克风阵列技术的信号路径
# 摘要
多通道信号处理是现代信号处理技术的核心之一,尤其在麦克风阵列技术中扮演着至关重要的角色。本文首先介绍了多通道信号处理的基础知识和麦克风阵列技术原理,包括信号采样、波束形成技术、信号传输模型、方向估计方法等。随后,深入探讨了多通道信号处理的实现技术,例如多通道滤波器设计、时频分析技术以及空时信号处理技术的应用。文章第四章针对多通
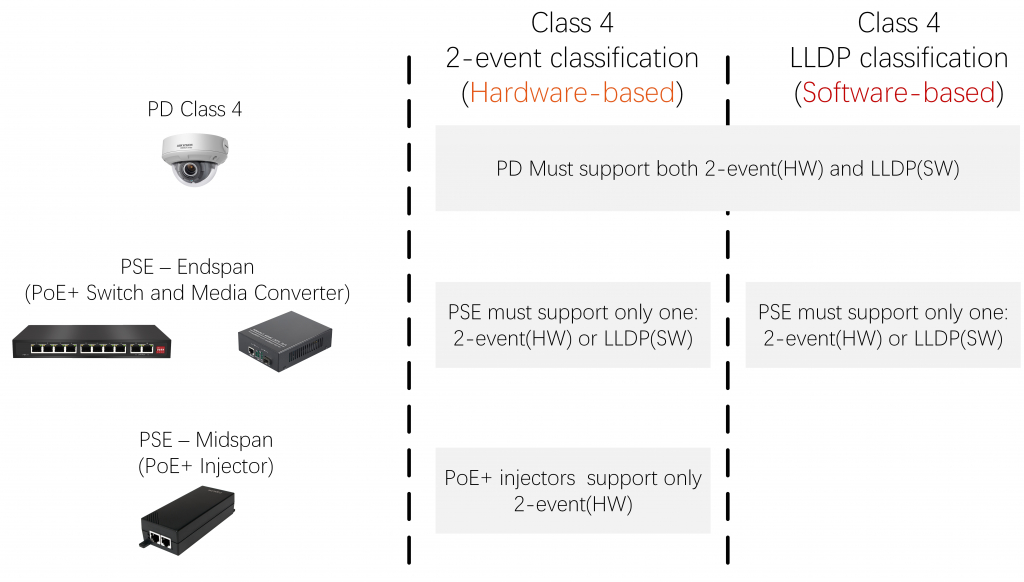
【POE方案设计精进指南】:10个实施要点助你实现最佳网络性能
# 摘要
POE(Power over Ethernet)技术允许通过以太网电缆同时传输数据和电力,为许多网络设备提供了便捷的供电方式。本文全面探讨了POE技术的基础知识、系统设计原则、实施过程中的关键问题以及高级实施技巧。文中详细阐述了POE的物理层标准、同步传输技术、设备兼容性、功率需求、网络架构规划和电源管理方法。针对数据传输效率与安全性、故障诊断与维护策略进行了深入
【CPCI标准全面解读】:从入门到高级应用的完整路径

# 摘要
本文全面概述了CPCI标准,从其起源与发展、核心架构、技术规范到实践操作进行了深入探讨。在理论基础上,文章介绍了CPCI的历史背景、发展过程以及架构组成和技术关键点。在实践操作部分,重点讲述了CPCI系统的设计实现、测试验证流程和应用案例分析。此外,本文还探索了CPCI标准的高级应用技巧,包括性能优化策略、安全机制以及
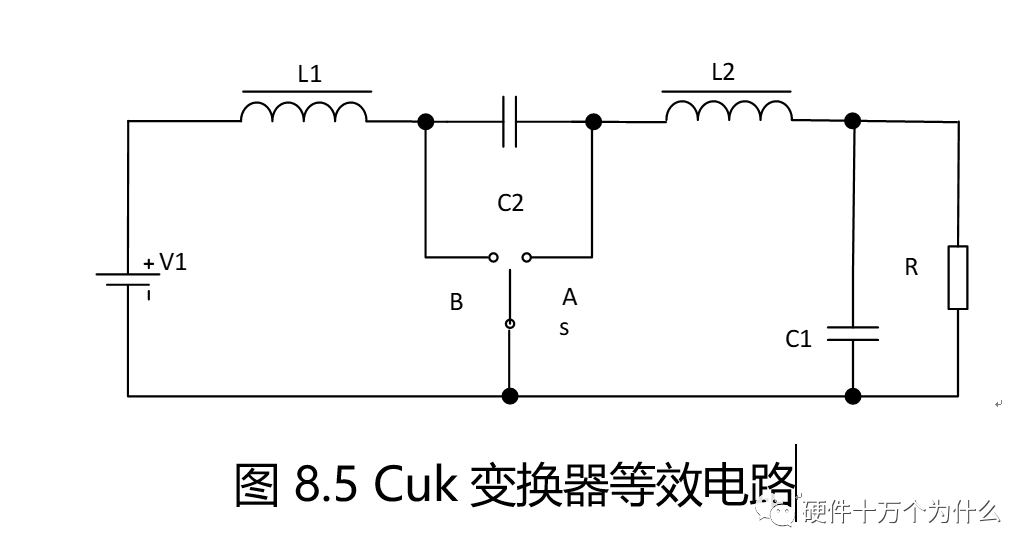
Cuk变换器电路设计全攻略:10大技巧助你从新手到专家
# 摘要
Cuk变换器是一种高效的直流-直流转换器,以其高效率和独特的工作原理而受到广泛应用。本文从理论基础出发,深入探讨了Cuk变换器的设计关键参数、控制策略以及稳定性分析。在设计实践章节中,详细论述了元件选择、布局、仿真测试和原型调试的过程,确保变换器性能达到预期。此外,本文还涵盖了软开关技术、高效率设计和多模式操作等
River2D性能革命:9个策略显著提升计算效率

# 摘要
本文详细介绍了River2D软件的性能挑战和优化策略。文章首先概述了River2D的基本性能挑战,随后探讨了基础性能优化措施,包括硬件加速、资源利用、网格和单元优化,以及时间步长与稳定性的平衡。接着,文章深入分析了River2D的高级性能提升技术,如并行计算、内存管理、缓存策略、异步I/O操作和数据预取。通过性能测试与分析,本文识别了常见问题并提供了诊断和调试方法,同时分享了优化案例研究,
【机器人控制高级课程】:精通ABB ConfL指令,提升机械臂性能

# 摘要
本文系统地探讨了ABB机械臂的ConfL指令集,包括其基础结构、核心组件和高级编程技术。文章深入分析了ConfL指令集在机器人编程中的关键作用,特别是在精确控制技术、高效运行策略以及机器视觉集成中的应用。此外,本文通过案例研究了ConfL指令在复杂任务中的应用,强调了自适应控制与学习机制的重要性,并探讨了故障诊断与维护策略。最后,文章展望了ConfL指令的未来发展趋
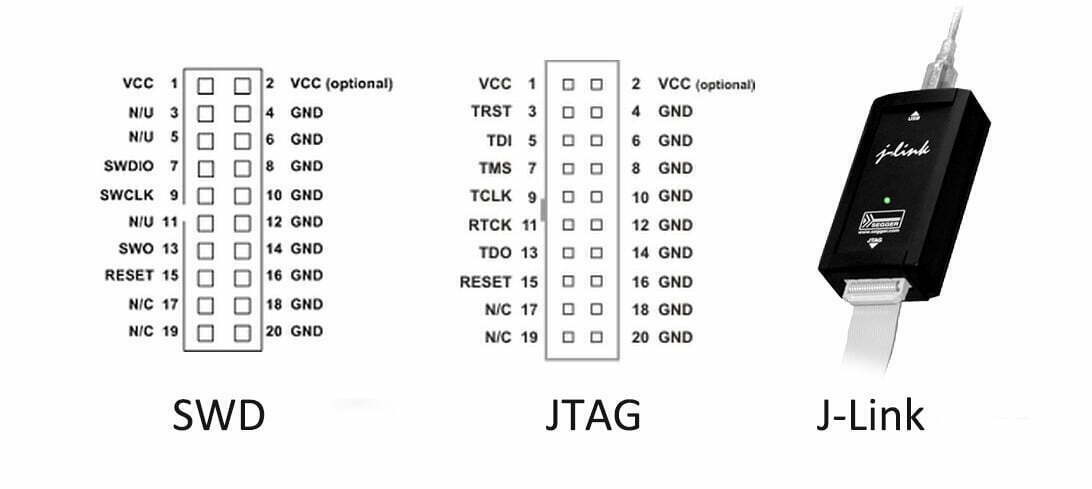
HC32xxx系列开发板快速设置:J-Flash工具新手速成指南
# 摘要
本文对HC32xxx系列开发板和J-Flash工具进行了全面的介绍和探讨。首先概述了HC32xxx系列开发板的特点和应用场景。随后深入分析了J-Flash工具的基础使用方法,包括界面介绍、项目创建、编程及调试操作。在此基础上,本文详细探讨了J-Flash工具的高级功能,如内存操作、多项目
STM32传感器融合技术:环境感知与自动泊车系统

# 摘要
本文综合探讨了基于STM32的传感器融合技术,详细阐述了从环境感知系统的设计到自动泊车系统的实现,并进一步分析了传感器数据处理、融合算法实践以及系统集成和测试的高级应用。通过对环境感知和自动泊车技术的理论与实践探讨,揭示了传感器融合在提升系统性能和可靠性方面的重要性。同时,本文还探
【tcITK图像旋转实用脚本】:轻松创建旋转图像的工具与接口

# 摘要
本文综合介绍了tcITK图像旋转技术的理论基础、脚本编写、实践应用以及进阶技巧,并对未来发展进行了展望。首先,概述了图像旋转的基本概念、tcITK库的功能和图像空间变换理论。随后,详细讲解了tcITK图像旋转脚本的编写方法、调试和异常处理,并讨论了图像旋转工具的创建、接口集成、测试与优化。进阶技巧章节探讨了高级图像处理技术、性能提升及跨平台和多语言支持。文章
SeDuMi问题诊断与调试:10个常见错误及专家级解决方案

# 摘要
本文针对SeDuMi问题诊断提供了全面概述,深入探讨了SeDuMi的理论基础,包括其工作原理、与线性规划的关联、安装配置以及输入输出数据处理。针对SeDuMi使用过程中可能遇到的常见问题,如安装配置错误、模型构建问题和运行时错误等,本文提出了诊断方法和解决方案。同时
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )