【ZYNQ开发平台终极指南】:快速搭建你的第一个SDK项目并掌握硬件与软件协同工作
发布时间: 2024-12-22 17:27:46 阅读量: 3 订阅数: 6 

ALINX_ZYNQ开发平台SDK应用教程V2.07-教程与笔记习题

# 摘要
本文全面介绍了基于ZYNQ开发平台的软硬件协同开发流程。首先概述了ZYNQ开发平台的基础环境搭建和硬件架构,重点关注了处理器子系统(PS)和可编程逻辑(PL)的结构解析及内存管理方案。随后详细讲解了如何通过SDK创建项目、配置环境、集成软件组件和驱动,以及构建和运行应用程序。文章进一步深入探讨了软硬件协同开发中的性能优化技巧、硬件加速与软件接口的集成,以及实时系统集成。高级应用开发与案例分析章节提供了实际的接口和协议实现、跨平台应用构建,并通过案例研究展示了ZYNQ在实际项目中的应用。最后,文章展望了ZYNQ技术的未来趋势,包括最新技术进展、社区资源及开发者生态,并预测了物联网、边缘计算、人工智能与机器学习的整合前景。
# 关键字
ZYNQ开发平台;硬件架构;内存管理;SDK配置;软硬件协同;实时系统集成;跨平台应用;未来趋势预测
参考资源链接:[ZYNQ开发平台SDK全面教程:实例更新与实践指南](https://wenku.csdn.net/doc/2mme1uu2sw?spm=1055.2635.3001.10343)
# 1. ZYNQ开发平台概述与基础环境搭建
## 1.1 ZYNQ开发平台介绍
ZYNQ是一种将ARM处理器核心与FPGA(现场可编程门阵列)技术相结合的SoC(System on Chip)解决方案,由Xilinx公司推出。该平台旨在为开发者提供灵活的设计选择,既可以利用ARM处理器的高性能,又能发挥FPGA的可定制性,以适应不断变化的应用需求。ZYNQ系列SoC的出现,对嵌入式系统设计产生了深远的影响。
## 1.2 ZYNQ的市场定位与优势
ZYNQ设计的核心优势在于其双核架构,其中包含高性能的处理器子系统(PS)和可编程逻辑(PL)。PS侧通常包括一个或多个ARM处理器,负责运行操作系统和应用软件;PL侧则是FPGA,用于实现专用硬件加速和接口定制。这种架构让ZYNQ具有了软硬件协同开发的特性,适合于要求高集成度、低功耗和快速原型开发的场景。
## 1.3 基础环境搭建步骤
搭建ZYNQ开发环境需要以下几个步骤:
1. **安装必要的软件:**
- 下载并安装Xilinx Vivado设计套件,这是开发ZYNQ项目的核心工具。
- 安装Xilinx SDK,与Vivado配合使用以实现软件应用的开发。
2. **硬件资源准备:**
- 获取一块支持ZYNQ的开发板,例如Xilinx官方的ZedBoard或Arty系列。
- 确保开发板的固件和引导程序已经更新到支持ZYNQ最新版本的状态。
3. **配置开发环境:**
- 设置Vivado的项目目录,配置必要的环境变量,如`XILINX_VIVADO`和`PATH`。
- 通过Vivado创建和管理项目,并与SDK进行协同开发。
完成这些基础步骤后,开发者便可以开始ZYNQ平台的软硬件协同开发之旅了。接下来,我们可以逐步深入了解ZYNQ的架构细节,并掌握如何高效地开发和优化系统。
# 2. 深入理解ZYNQ的硬件架构
## 2.1 ZYNQ的PS与PL结构解析
### 2.1.1 处理器子系统(PS)的功能与接口
处理器子系统(Processing System,PS)是ZYNQ架构中的一个关键部分,它集成了一个双核ARM Cortex-A9处理器,提供了丰富的接口和功能,使得开发者能够运行操作系统如Linux或者裸机应用程序。PS不仅处理复杂的控制任务,还提供了与可编程逻辑(Programmable Logic,PL)交互的硬件接口。
PS主要包含以下部分:
- **处理器核(CPU)**: 内部有两个ARM Cortex-A9核,每个核拥有独立的一级缓存和共享的二级缓存。
- **内存控制器**: 通过多通道的内存控制器支持 DDR3/DDR3L/DDR2 SDRAM 等存储器类型。
- **外设接口**: 如USB, SD/SDIO, CAN, SPI, UART, I2C等接口,以支持不同的外围设备。
- **中断控制器**: 管理来自CPU和各种外设的中断请求。
- **定时器**: 包括通用定时器、看门狗定时器等。
- **电源管理单元**: 负责整个PS的电源管理以及系统级的电源管理。
PS和PL之间的通信通过高级互连(AXI)接口完成,允许快速且高效的数据交换。AXI总线接口支持高带宽数据传输,并且具有灵活的地址映射机制。在PS端,AXI接口被映射到一个或多个内部的互连节点。
### 2.1.2 可编程逻辑(PL)的资源配置与使用
可编程逻辑(Programmable Logic,PL)部分是基于FPGA技术,提供大量的逻辑单元和存储资源,以供用户根据需求进行逻辑设计和定制。PL部分可以通过Vivado等工具进行编程和配置,实现各种数字逻辑功能。以下是PL的关键特性:
- **逻辑资源**: 包括查找表(LUT)、寄存器、Block RAM等。
- **DSP单元**: 提供专用的硬件乘法器,用于高性能数字信号处理。
- **高速串行连接**: 如GTP/GTX/GTH收发器,支持高达数十Gbps的高速串行通信。
- **I/O引脚**: 提供灵活的I/O配置,支持各种标准接口。
在ZYNQ架构中,PS和PL之间可以实现紧密的数据交互,PL可以作为一个加速器,执行那些对速度和实时性要求很高的任务。为了有效地使用PL资源,开发者需要对Vivado设计套件有深入的理解,能够进行综合、实现以及生成比特流文件。
了解ZYNQ的PS与PL的结构,对开发者而言,能够更好地规划硬件资源,以实现系统设计最优化。下面的表格展示了PS与PL的对比:
| 特性 | PS(处理器子系统) | PL(可编程逻辑) |
|------------|------------------------|--------------------------|
| 核心 | ARM Cortex-A9处理器 | FPGA逻辑资源和DSP单元 |
| 接口 | 标准外围设备接口 | AXI接口,高速串行接口 |
| 功能 | 复杂控制处理和任务调度 | 自定义逻辑功能和数据处理加速器 |
| 配置 | 固定配置,但支持软件扩展 | 可完全定制和重配置 |
| 应用 | 操作系统运行、人机界面处理 | 实时数据处理、特定算法加速实现 |
在设计ZYNQ系统时,PS与PL之间的协作关系至关重要。在本节中,我们将进一步深入探讨ZYNQ的内存管理、存储方案以及电源管理技术,以获得对ZYNQ架构更全面的认识。
# 3. SDK项目的搭建与配置
## 3.1 创建SDK项目与环境初始化
在本章节中,我们将探索如何创建一个SDK项目并进行环境初始化,这是ZYNQ开发流程中至关重要的一步,它涉及选择合适的软件开发工具包(SDK)模板,配置必要的环境变量,以便于我们能够顺利地进行后续的软件开发和调试工作。
### 3.1.1 选择合适的SDK模板
选择合适的SDK模板是项目初始化的第一步。在Xilinx开发环境中,SDK提供了一系列预制的模板,这些模板为不同类型的项目预先设置了配置参数和目录结构,帮助开发者节省时间并确保项目的结构化。以下是一些常用的SDK模板:
- **Bare Metal Application**:适用于不需要操作系统的嵌入式应用程序。它直接使用处理器提供的底层硬件接口。
- **Petalinux Project**:用于构建一个完整的基于Linux的系统。Petalinux是Xilinx为ZYNQ平台专门开发的Linux发行版,包含许多定制化的功能。
- **lwIP Echo Server**:提供一个基于lwIP协议栈的简单回声服务器示例,适合学习网络编程。
- **lwIP HTTP Server**:提供一个基于lwIP的HTTP服务器示例,用于展示如何处理HTTP请求。
选择模板时,需要考虑项目的具体需求和目标。例如,如果项目是关于开发一个运行Linux操作系统的复杂嵌入式系统,那么选择Petalinux Project模板将是最佳选择。
### 3.1.2 配置Xilinx Vivado环境变量
在开始开发之前,需要确保已经正确配置了Xilinx Vivado环境变量。这些变量为SDK提供了必要的路径信息,以便它能找到工具链、库文件和其他重要资源。在Linux环境下,通常需要设置以下环境变量:
```bash
export XILINX_VIVADO=/opt/Xilinx/Vivado/2019.2
export XILINX_SDK=/opt/Xilinx/SDK/2019.2
export PATH=$PATH:$XILINX_VIVADO/bin:$XILINX_SDK/bin
```
在Windows环境下,环境变量通常在系统的“环境变量”对话框中设置。
## 3.2 SDK项目中的软件组件和驱动配置
在创建项目并初始化环境之后,我们接着需要配置软件组件和集成设备驱动。这些步骤将确保我们的应用程序能够与ZYNQ的硬件接口正确地通信。
### 3.2.1 硬件抽象层(HAL)的生成与配置
硬件抽象层(HAL)是位于软件和硬件之间的一层,它为上层应用提供了一个与硬件无关的接口。HAL的生成和配置对于简化硬件资源的管理和使用至关重要。在SDK中,可以使用“New Application Project”向导来自动生成HAL。
上图显示了HAL配置向导的界面,开发者可以在这里指定项目名称、目标硬件平台和选择模板。生成的HAL包含了对特定硬件资源的访问代码。
### 3.2.2 设备驱动的集成与调试
为了能够充分利用ZYNQ的硬件资源,通常需要集成和使用各种设备驱动。设备驱动为特定硬件设备提供了软件接口,使得程序员能够编写出控制硬件的代码。集成驱动后,我们可以使用Xilinx SDK提供的调试工具进行调试。这些工具包括:
- **GDB(GNU Debugger)**:用于程序的调试,能够设置断点、单步执行、检查和修改变量值等。
- **System Debugger**:集成在Vivado中,允许用户同时调试硬件和软件。
## 3.3 构建并运行你的第一个应用程序
此部分将会讲述如何编写、调试并最终在ZYNQ硬件上运行我们的第一个应用程序。这一过程是开发体验的高潮,也是学习ZYNQ开发的必经之路。
### 3.3.1 应用程序的编写和调试
编写应用程序时,通常从简单的“Hello, World!”开始。然后,根据项目需求逐步添加更复杂的代码逻辑。在此阶段,代码的编写需要遵循嵌入式编程的最佳实践,包括内存管理和异常处理。
下面是一个简单的示例代码段,用于演示如何在ZYNQ上编写和调试一个基本的“Hello, World!”程序。
```c
#include <stdio.h>
int main()
{
printf("Hello, World!\n");
return 0;
}
```
### 3.3.2 项目构建过程解析
构建过程通常包括编译、链接等步骤,将源代码转换成可执行文件。在Xilinx SDK中,这一过程可以通过“Build Configurations”来配置不同的构建选项。例如:
- **Debug**:为调试目的构建,通常包含调试符号,优化级别较低。
- **Release**:为了最终产品优化构建,不包含调试信息,优化级别较高。
### 3.3.3 在ZYNQ硬件上运行程序
构建完成后,我们需要将程序下载到ZYNQ硬件上运行。通常,这需要以下几个步骤:
- 配置硬件平台:在Vivado中加载硬件设计并生成比特流文件。
- 设置SDK和硬件连接:确保SDK能够与ZYNQ板通信。
- 下载程序:使用“Program FPGA”功能将比特流和可执行文件下载到ZYNQ板。
在项目成功运行后,可以通过串口终端查看输出结果,完成我们的第一个应用程序的测试。
通过以上步骤,我们完成了SDK项目的搭建、配置以及第一个应用程序的创建和运行。这些知识为进一步的软硬件协同开发打下了坚实的基础。
# 4. 软硬件协同开发技巧
## 4.1 软件优化以适应硬件限制
在软硬件协同开发中,硬件资源的限制对软件性能有着直接的影响。了解硬件的限制,并针对性地对软件进行优化,是提升整个系统性能的关键。本节将深入探讨硬件资源如何影响软件性能,并提供代码级别的性能调优策略。
### 4.1.1 硬件资源对软件性能的影响
硬件资源包括处理器性能、内存大小、外设接口速度等。软件开发者需要了解这些硬件资源的特性和限制,才能编写出高效的应用程序。例如,处理器的计算能力会限制代码的执行速度;内存大小则限制了程序能够同时处理的数据量。硬件的带宽限制则会影响外设接口的数据传输速率。
### 4.1.2 代码级别的性能调优
针对硬件资源的限制,开发者可以进行如下代码级别的性能调优:
- **循环优化**:减少循环内部的计算量,避免不必要的条件判断和函数调用,使用循环展开技术来提高效率。
- **内存访问优化**:合理的数据结构和内存布局可以减少缓存未命中(cache miss)的情况,提高内存访问速度。
- **算法优化**:选择时间复杂度和空间复杂度更优的算法来减少对硬件资源的需求。
以下是一个简单的代码优化示例,展示了如何通过减少不必要的函数调用来提高程序性能:
```c
// 原始代码
for (int i = 0; i < size; ++i) {
process(array[i]);
}
// 优化后的代码
for (int i = 0; i < size; ++i) {
process_data(&array[i]);
}
// 函数定义优化
void process_data(Data *data) {
// 这里进行数据处理,避免了多次调用process()函数的开销
}
```
在上述例子中,避免了在循环中频繁调用`process()`函数,从而减少了函数调用的开销。通过直接操作数据指针,提高了代码执行效率。
## 4.2 硬件加速与软件接口
### 4.2.1 硬件加速器的配置与使用
硬件加速器是ZYNQ平台中一个重要的特性,它能够显著提升处理特定任务的性能。对于开发者来说,了解如何配置和使用硬件加速器是提高软件性能的关键。
硬件加速器通常通过直接内存访问(DMA)与处理器交互,减少CPU的负载。使用硬件加速器时,需要注意以下几点:
- **DMA传输**:利用DMA进行数据传输可以减少CPU的干预,提高数据传输效率。
- **中断处理**:合理配置中断能够有效管理加速器的工作状态,提高程序的响应性。
- **资源分配**:正确分配并管理硬件加速器资源,确保系统资源的最优利用。
在ZYNQ平台上,一个常见的硬件加速器使用示例是通过FPGA逻辑来加速图像处理任务,如下是一个简化的配置流程:
```verilog
// 简化的FPGA逻辑配置代码(Verilog)
module image_accelerator(
input clk,
input rst,
// DMA接口
input [31:0] dma_data_in,
output reg [31:0] dma_data_out,
// 控制信号
input start,
output reg done
);
// 加速器内部逻辑
// ...
endmodule
```
在软件层面上,开发者需要编写相应的驱动程序来控制硬件加速器:
```c
// 硬件加速器驱动配置代码
void setup_accelerator() {
// 初始化DMA
// 设置中断处理函数
// 配置加速器参数
}
void run_accelerator() {
// 启动硬件加速器
// 等待加速完成
}
```
### 4.2.2 软件与硬件加速接口的集成
集成软件与硬件加速器接口,需要开发者熟悉加速器的接口协议,并且能够将加速器的功能暴露给软件层,以供调用。这通常涉及到驱动程序的编写和硬件抽象层(HAL)的创建。
集成步骤通常包括:
1. **驱动程序编写**:编写驱动程序与硬件加速器通信,提供简洁的API接口给上层软件。
2. **HAL层创建**:创建硬件抽象层,封装硬件操作细节,提供统一的接口给应用程序。
3. **性能测试与调优**:测试集成后的系统性能,根据测试结果进行必要的调整。
## 4.3 实时系统与ZYNQ的集成
### 4.3.1 实时操作系统的选择与配置
对于需要实时性能的应用,选择合适的实时操作系统(RTOS)并进行配置是至关重要的。实时操作系统具有确定性的任务调度和低延迟的响应能力,适合于实时任务的处理。
在ZYNQ平台上集成RTOS时,需要考虑以下因素:
- **任务调度**:选择支持优先级调度、时间片轮转等策略的RTOS,以满足实时性要求。
- **中断管理**:配置RTOS以响应硬件中断,保证实时任务可以及时得到处理。
- **内存管理**:根据RTOS的内存管理机制,合理分配和使用内存资源。
一个典型的RTOS配置示例是使用FreeRTOS来实现任务的实时调度:
```c
// FreeRTOS任务创建示例
void task_function(void *pvParameters) {
// 任务代码
}
int main() {
// 系统初始化
// ...
// 创建RTOS任务
xTaskCreate(
task_function, // 任务函数
"TaskFunction", // 任务名称
STACK_SIZE, // 任务堆栈大小
NULL, // 传递给任务函数的参数
tskIDLE_PRIORITY, // 任务优先级
NULL // 任务句柄
);
// 启动RTOS调度器
vTaskStartScheduler();
// 如果调度器启动失败,执行下面的代码
for(;;);
}
```
### 4.3.2 实时任务的调度与管理
在ZYNQ平台上,实时任务的调度和管理直接关系到整个系统的实时性能。开发者需要根据任务的实时要求和优先级进行合理的调度。
主要策略包括:
- **优先级分配**:根据任务的实时性和重要性分配不同的优先级。
- **时间片调度**:对于同等优先级的任务采用时间片调度策略。
- **动态优先级调整**:在运行时根据任务的负载动态调整任务优先级。
实时任务调度的一个关键点是保证高优先级任务能够在规定的时间内得到响应,这通常通过配置中断和任务优先级来实现。在ZYNQ平台上,可以通过Xilinx提供的硬件抽象层来获取硬件中断信号,并快速地触发高优先级的RTOS任务。
通过本节的介绍,我们了解到如何针对ZYNQ硬件资源限制进行软件优化,如何有效地使用硬件加速器,并且了解了实时任务在ZYNQ平台上的集成方法。这些技巧对于提升系统的整体性能和实时性至关重要,并且能够为开发者提供更加丰富和高效的应用开发经验。
# 5. 高级应用开发与案例分析
随着ZYNQ技术的成熟,开发者们已经不仅仅局限于基础的硬件与软件协同开发,而是开始探索如何利用ZYNQ实现更高级的应用以及如何将这些技术应用于各种具体项目中。本章将深入探讨高级接口和协议在ZYNQ上的实现,以及如何构建跨平台应用程序。同时,我们将通过案例研究,具体分析ZYNQ在不同项目中的应用实践。
## 5.1 高级接口和协议在ZYNQ上的实现
### 5.1.1 网络通信协议的集成
网络通信是现代嵌入式系统中不可或缺的功能之一。ZYNQ平台拥有丰富的接口,使得开发者可以轻松集成网络通信协议。这里我们将重点介绍如何在ZYNQ平台上集成常用的以太网通信协议。
首先,需要配置PS(处理器子系统)中的GEM(Gigabit Ethernet MAC)接口。在Xilinx Vivado工具中,可以通过图形界面配置GEM,设置其工作模式(如MII、RMII或GMII),并启用中断等高级特性。以下是一个配置GEM接口的代码示例:
```verilog
// Verilog代码片段
assign axi_emac0CLIENTEMAC0PAUSEREQ = 1'b0;
// 其他接口信号初始化...
// 在适当的位置初始化MAC,例如在PS初始化代码中
EMAC_init();
// 设置GEM为GMII工作模式
axi_emac0GEM.Configuration_vector = 32'h00000007; // GMII模式
// 启用中断
axi_emac0InterruptEnable = 32'h00000003;
```
在软件层面上,需要使用相应的网络驱动来支持TCP/IP协议栈。在ZYNQ上常见的做法是使用LWIP,一个开源的TCP/IP协议栈。在Vivado SDK中,可以通过创建项目时选择合适的模板来包含LWIP库。
```c
#include "lwip/init.h"
#include "lwip/netif.h"
#include "lwip/etharp.h"
// 初始化LWIP网络接口
void netif_init() {
struct netif *netif;
// 网络接口初始化代码...
netif_add(netif, IP_ADDR_ANY, NETMASK, GATEWAY, NULL, ðernetif_init, &tcpip_input);
netif_set_default(netif);
// 启动网络接口
netif_set_up(netif);
}
```
### 5.1.2 高级外设接口的配置与使用
ZYNQ平台强大的可编程逻辑部分(PL)为高级外设接口的集成提供了无限可能。通过PL,开发者可以实现高速数据传输、特殊信号处理以及特定的接口协议。例如,可以实现PCIe接口、高速ADC接口或其他定制通信协议。
在配置PL时,通常需要以下步骤:
- 使用Vivado设计套件进行逻辑设计。
- 确保PS部分的相应接口已经启用并配置好,比如MIO或EMIO。
- 设计适当的逻辑来完成协议转换和数据传输。
下面是一个使用Vivado设计高速串行通信接口的高层次步骤:
1. 在Vivado中创建一个新项目并导入你的硬件描述文件(HDL)。
2. 配置PS中的相关接口,如UART、I2C或SPI等。
3. 创建一个新的Block Design,并使用IP Catalog中的IP核或自定义逻辑来实现特定协议的处理。
4. 将自定义逻辑或IP核与PS的接口相连。
5. 进行适当的引脚分配和约束设置。
6. 实现并生成比特流。
7. 在SDK中导出硬件定义文件,并进行软件开发。
```verilog
// Verilog代码片段,实现SPI通信协议
spi_transfer: process(clk)
begin
if rising_edge(clk) then
if spi_tx_rdy = '1' then
// 检查是否需要发送数据
if spi_tx_trig = '1' then
spi_mosi <= spi_tx_data(7);
spi_tx_data <= spi_tx_data(6 downto 0) & spi_miso;
if spi_bit_cnt = 0 then
// 发送完成
spi_tx_rdy <= '1';
spi_tx_trig <= '0';
else
spi_bit_cnt <= spi_bit_cnt - 1;
end if;
else
spi_tx_rdy <= '0';
end if;
else
spi_tx_rdy <= '1';
end if;
end if;
end process;
```
## 5.2 跨平台应用程序的构建
### 5.2.1 跨平台开发工具和框架
为了使应用程序能够跨平台运行,开发者往往需要借助于跨平台开发工具和框架。在ZYNQ上构建应用时,常见的方法之一是使用Qt框架,它为开发者提供了一个统一的开发环境,可以同时支持Linux和Windows等不同平台。
使用Qt时,首先需要安装Qt开发环境以及交叉编译工具链。以下是一个配置Qt环境和交叉编译器的例子:
```bash
# 下载并安装Qt for Linux on ARM
wget http://example.com/qt-linux-arm.tar.gz
tar -xzf qt-linux-arm.tar.gz
# 安装交叉编译器
sudo apt-get install gcc-arm-linux-gnueabi
# 设置环境变量
export CROSS_COMPILE=arm-linux-gnueabi-
```
一旦环境准备就绪,就可以创建一个Qt项目,并选择合适的模板开始开发。由于ZYNQ搭载的是ARM处理器,所以可以选择ARM架构的模板。
在实际开发过程中,可能会需要处理不同平台间的差异。这时可以使用Qt的条件编译指令来进行针对性的代码优化。
```cpp
#ifdef Q_OS_LINUX
// 针对Linux平台的代码
#else
// 针对其他平台的代码
#endif
```
### 5.2.2 代码移植与优化策略
代码移植是跨平台开发中的一项重要任务,而优化则是为了确保应用在ZYNQ平台上的性能。移植过程中,开发者需要考虑到不同平台间架构和API的差异,并作出适当的调整。优化策略可能包括减少不必要的计算,使用高效的算法,以及针对特定硬件优化代码等。
```cpp
// 示例代码:优化性能的一个简单例子
// 优化前:低效的循环
for(int i = 0; i < N; ++i) {
someCalculations(i);
}
// 优化后:使用基于迭代器的循环
for(auto it = begin; it != end; ++it) {
*it = someCalculations(*it);
}
```
## 5.3 案例研究:ZYNQ在具体项目中的应用
### 5.3.1 项目概述与需求分析
在本节中,我们将通过一个实际案例来探讨ZYNQ在特定项目中的应用。假设我们有一个项目需求是设计一套用于工业自动化领域的控制系统。这个系统需要实时采集传感器数据,处理视频信号,并通过网络向服务器发送数据。
### 5.3.2 设计实现与调试过程
- **硬件设计**:利用ZYNQ的PS与PL集成特性,设计一个系统,其中PS处理网络通信和数据处理任务,PL则负责视频信号处理和传感器数据采集。
- **软件开发**:开发软件以运行在ZYNQ上,包括实时操作系统,驱动程序,应用程序等。
- **调试与测试**:使用Xilinx提供的各种调试工具来确保硬件与软件能够协同工作。
下表展示了项目中可能用到的ZYNQ外设及其配置:
| 外设名称 | 配置与用途 |
| --- | --- |
| ARM Cortex-A9处理器 | 运行实时操作系统和主要控制软件 |
| GEM接口 | 实现工业以太网通信 |
| 多通道ADC接口 | 采集传感器数据 |
| HDMI输入/输出 | 视频信号的输入与输出 |
| PCIe接口 | 高速数据传输 |
以下是一个基于本案例的简单mermaid流程图,展示了系统的工作流程:
```mermaid
graph LR
A[开始] --> B[初始化ZYNQ硬件]
B --> C[启动网络服务]
C --> D[等待传感器数据]
D --> E{是否有数据?}
E -- 是 --> F[处理数据]
E -- 否 --> D
F --> G[输出视频信号]
G --> H[通过网络发送数据]
H --> I{是否继续?}
I -- 是 --> D
I -- 否 --> J[关闭系统]
```
整个调试过程可能涉及到多个层面,从简单的逻辑验证到性能分析,再到环境测试。在硬件调试阶段,可以使用Xilinx提供的逻辑分析仪工具来观察信号,确定硬件设计是否符合预期。
```bash
# Xilinx逻辑分析仪工具使用示例
vivado% source /opt/Xilinx/Vivado/2018.2/settings64.sh
vivado% vivado -mode batch -source logic_analyzer.tcl
```
在软件调试阶段,可以使用GDB调试器附加到运行中的程序,监控变量,单步执行,设置断点等。
```bash
# 使用GDB调试器
gdb vmlinux
(gdb) target remote :1234
(gdb) b main
(gdb) c
```
在进行性能优化时,可以使用Linux内核自带的性能分析工具,如oprofile或perf等,来分析软件在ZYNQ平台上的性能瓶颈。
```bash
# 使用Linux性能分析工具perf
sudo perf top
```
通过这样的案例研究,我们可以看到如何将ZYNQ技术应用在解决实际问题上,并通过具体的步骤来设计、实现并优化一个复杂系统。
# 6. ZYNQ开发的未来趋势与展望
随着技术的快速发展,ZYNQ开发也正不断迎来新的挑战和机遇。从新型器件的特性与优势到开发者面临的社区支持,再到与其他领域技术的融合趋势,本章将探讨ZYNQ开发的未来发展方向。
## 6.1 ZYNQ技术的最新进展与创新
ZYNQ技术通过集成处理器子系统(PS)与可编程逻辑(PL)的独特架构,使得开发者能在单一芯片上实现软硬件的深度协同设计。这一节将详细分析最新的ZYNQ器件和开发工具的进展。
### 6.1.1 新型ZYNQ器件的特性与优势
新型ZYNQ器件持续在性能、能效和功能上取得突破。例如,Xilinx推出了具有更高计算性能和更多集成外设的ZYNQ UltraScale+ MPSoC系列。其优势主要体现在:
- **增强的处理器性能**:新型处理器如ARM Cortex-A53和Cortex-R5F提供了更高的处理能力。
- **更高集成度**:集成了更多的内存接口和高速通信接口,如100G以太网、PCIe Gen4等。
- **电源管理优化**:改进的电源管理功能减少了功耗,延长了电池寿命。
- **安全特性**:硬件级别的安全功能,如TrustZone技术和加密加速器,提高了数据安全。
### 6.1.2 开发工具的更新与改进
随着硬件的演进,开发工具也不断进行优化和更新,以提供更高效的开发体验。Xilinx的Vivado设计套件通过以下方面改进:
- **用户体验的优化**:通过改善界面设计和简化设计流程来提升用户体验。
- **更强大的调试能力**:集成更多的调试和性能分析工具,如SDSoC和SDACCEL。
- **支持更多的开源项目**:与开源社区合作,将更多的开源工具和IP集成到Vivado中。
## 6.2 社区资源与开发者生态
一个强大的开发者生态对于技术的普及和进步至关重要。本节将探讨ZYNQ社区资源的贡献和开发者面临的机遇与挑战。
### 6.2.1 开源项目与社区支持
开源项目在推动技术革新和社区生态建设中发挥着关键作用。ZYNQ社区通过以下方式支持开源项目:
- **开源硬件平台**:提供ZYNQ开发板,以便开发者可以轻松搭建和测试项目。
- **支持和贡献IP核**:鼓励开发者共享和贡献IP核,丰富开发资源。
- **社区论坛和活动**:举办各种线上线下的交流和分享活动,如ZYNQ开发者大会。
### 6.2.2 ZYNQ开发者面临的机遇与挑战
ZYNQ开发者在享受社区支持的同时,也面临不少挑战:
- **技能要求高**:要求开发者同时具备硬件设计和软件编程的能力。
- **技术更新快**:需不断学习最新的硬件技术和软件工具。
- **资源分散**:信息和资源较为分散,需要投入更多时间和精力去整合。
## 6.3 未来技术趋势与行业应用预测
ZYNQ技术的应用将随着新技术的发展而不断扩展。本节将展望ZYNQ在物联网、边缘计算和人工智能领域的应用前景。
### 6.3.1 物联网与边缘计算的影响
物联网(IoT)和边缘计算的发展对ZYNQ这类集成平台提出了新的要求:
- **低功耗设计**:边缘设备需要更长的续航时间和更少的能量消耗。
- **实时处理**:在边缘端需要快速响应和处理数据,这要求ZYNQ具备更强的实时处理能力。
- **硬件安全性**:保护设备和数据不被非法访问变得越来越重要。
### 6.3.2 人工智能与机器学习的整合前景
人工智能(AI)和机器学习(ML)是推动未来技术发展的关键因素,ZYNQ平台因其独特的软硬件集成优势,在这一领域具有巨大潜力:
- **集成AI加速器**:新一代ZYNQ平台可能会集成专门的AI处理单元。
- **优化的机器学习框架**:为了支持ML模型在ZYNQ上的部署,可能需要优化如TensorFlow或PyTorch等框架。
- **边缘AI应用**:ZYNQ可以作为边缘AI应用的强有力硬件支撑,提供实时数据处理和决策支持。
通过深入分析ZYNQ开发的最新进展、社区生态和未来趋势,我们可以看出,ZYNQ技术正站在一个快速发展的十字路口上。开发者应充分利用社区资源,紧跟技术更新,积极探索新兴领域的应用,从而在ZYNQ开发的浪潮中乘风破浪。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《ZYNQ开发平台SDK应用教程》专栏深入探讨了ZYNQ开发平台的各个方面,提供了一系列全面的教程和指南。从快速搭建项目到掌握硬件与软件协同工作,再到优化多核编程模型和电源管理策略,专栏涵盖了ZYNQ开发的方方面面。此外,专栏还提供了有关多媒体处理、外围设备驱动、GPIO应用、中断处理、缓存管理、文件系统构建、设备树定制、多操作系统支持、FPGA逻辑编程、信号完整性分析和散热设计的深入指南。通过这些教程,开发人员可以充分利用ZYNQ平台的强大功能,构建高效、可靠且定制化的嵌入式系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Linux服务器管理:wget下载安装包的常见问题及解决方案,让你的Linux运行更流畅

# 摘要
本文全面介绍了Linux服务器管理中wget工具的使用及高级技巧。文章首先概述了wget工具的安装方法和基本使用语法,接着深入分析了在下载过程中可能遇到的各种问题,并提供相应的解决策略和优化技巧。文章还探讨了wget的高级应用,如用户认证、网站下载技
【Origin图表高级教程】:独家揭秘,坐标轴与图例的高级定制技巧
# 摘要
本文详细回顾了Origin图表的基础知识,并深入探讨了坐标轴和图例的高级定制技术。通过分析坐标轴格式化设置、动态更新、跨图链接以及双Y轴和多轴图表的创建应用,阐述了如何实现复杂数据集的可视化。接着,文章介绍了图例的个性化定制、动态更新和管理以及在特定应用场景中的应用。进一步,利用模板和脚本在Origin中快速制作复杂图表的方法,以及图表输出与分享的技巧,为图表的高级定制与应用提供了实践指导
SPiiPlus ACSPL+命令与变量速查手册:新手必看的入门指南!
# 摘要
SPiiPlus ACSPL+是一种先进的编程语言,专门用于高精度运动控制应用。本文首先对ACSPL+进行概述,然后详细介绍了其基本命令、语法结构、变量操作及控制结构。接着探讨了ACSPL+的高级功能与技巧,包括进阶命令应用、数据结构的使用以及调试和错误处理。在实践案例分析章节中,通过具体示例分析了命令的实用性和变量管理的策略。最后,探
【GC4663电源管理:设备寿命延长指南】:关键策略与实施步骤
# 摘要
电源管理在确保电子设备稳定运行和延长使用寿命方面发挥着关键作用。本文首先概述了电源管理的重要性,随后介绍了电源管理的理论基础、关键参数与评估方法,并探讨了设备耗电原理与类型、电源效率、能耗关系以及老化交互影响。重点分析了不同电源管理策略对设备寿命的影响,包括动态与静态策略、负载优化、温度管理以及能量存储与回收技术。
EPLAN Fluid版本控制与报表:管理变更,定制化报告,全面掌握

# 摘要
EPLAN Fluid作为一种高效的设计与数据管理工具,其版本控制、报告定制化、变更管理、高级定制技巧及其在集成与未来展望是提高工程设计和项目管理效率的关键。本文首先介绍了EPLAN Fluid的基础知识和版本控制的重要性,详细探讨了其操作流程、角色与权限管理。随后,文章阐述了定制化报告的理论基础、生成与编辑、输出与分发等操作要点
PRBS序列同步与异步生成:全面解析与实用建议

# 摘要
本论文详细探讨了伪随机二进制序列(PRBS)的定义、重要性、生成理论基础以及同步与异步生成技术。PRBS序列因其在通信系统和信号测试中模拟复杂信号的有效性而具有显著的重要性。第二章介绍了PRBS序列的基本概念、特性及其数学模型,特别关注了生成多项式和序列长度对特性的影响。第三章与第四章分别探讨了同步与异步PRBS序列生成器的设计原理和应用案例,包括无线通信、信号测试、网络协议以及数据存储测试。第五
【打造个性化企业解决方案】:SGP.22_v2.0(RSP)中文版高级定制指南
# 摘要
本文对SGP.22_v2.0(RSP)中文版进行详尽概述,深入探讨其核心功能,包括系统架构设计原则、关键组件功能,以及个性化定制的理论基础和在企业中的应用。同时,本文也指导读者进行定制实践,包括基础环境的搭建、配置选项的使用、高级定制技巧和系统性能监控与调优。案例研究章节通过行业解决方案定制分析,提供了定制化成功案例和特定功能的定制指南。此外,本文强调了定制过程中的安
【解决Vue项目中打印小票权限问题】:掌握安全与控制的艺术

# 摘要
本文详细探讨了Vue项目中打印功能的权限问题,从打印实现原理到权限管理策略,深入分析了权限校验的必要性、安全风险及其控制方法。通过案例研究和最佳实践,提供了前端和后端权限校验、安全优化和风险评估的解决方案。文章旨在为Vue项目中打印功能的权限管理提供一套完善的理论与实践框架,促进Vue应用的安全性和稳定性。
# 关键字
Vue项目;权限问题;打印功能;权限校验;安全优化;风
小红书企业号认证:如何通过认证强化品牌信任度
# 摘要
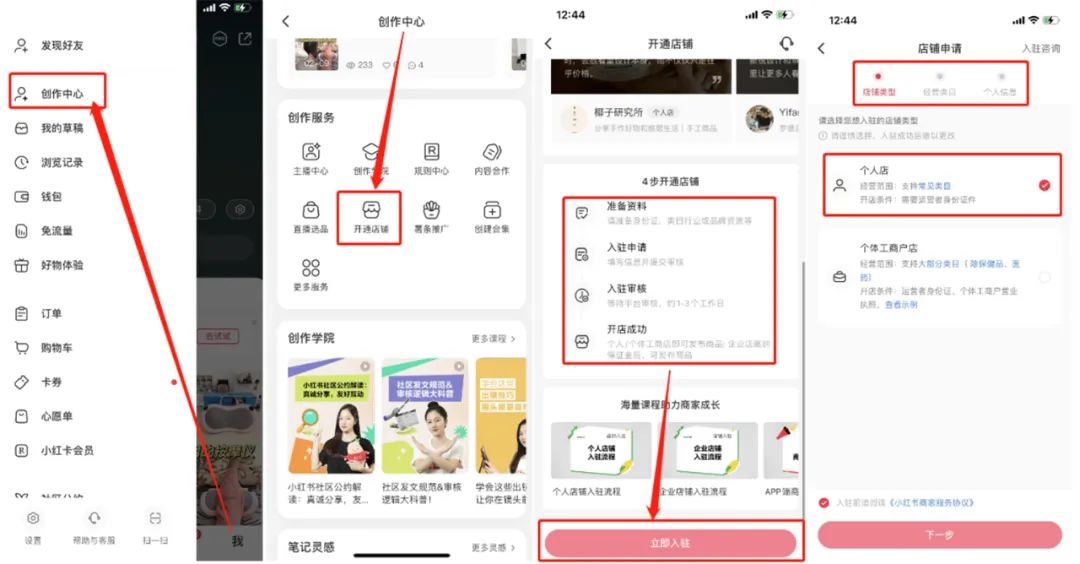
本文以小红书企业号认证为主题,全面探讨了品牌信任度的理论基础、认证流程、实践操作以及成功案例分析,并展望了未来认证的创新路径与趋势。首先介绍了品牌信任度的重要性及其构成要素,并基于这些要素提出了提升策略。随后,详细解析了小红书企业号认证的流程,包括认证前的准备、具体步骤及认证后的维护。在实践操作章节中,讨论了内容营销、用户互动和数据分析等方面的有效方法。文章通过成功案例分析,提供了品牌建设的参考,并预测了新媒体环境下小红书企业号认证的发展
【图书馆管理系统的交互设计】:高效沟通的UML序列图运用

# 摘要
本文首先介绍了UML序列图的基础知识,并概述了其在图书馆管理系统中的应用。随后,详细探讨了UML序列图的基本元素、绘制规则及在图书馆管理系统的交互设计实践。章节中具体阐述了借阅、归还、查询与更新流程的序列图设计,以及异常处理、用户权限管理、系统维护与升级的序列图设计。第五章关注了序列图在系统优化与测试中的实际应用。最后一章展望了图书馆管理系统的智能化前景以及序列图技术面临
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )