MATLAB优化工具箱在路径规划与调度中的革命性应用
发布时间: 2024-12-10 04:36:52 阅读量: 4 订阅数: 11 

如何在MATLAB中添加工具箱路径
# 1. MATLAB优化工具箱简介
MATLAB优化工具箱是用于解决数学优化问题的专业软件包,提供了丰富的方法和函数来帮助研究者和工程师构建、分析和解决优化模型。其内部包含众多经典和先进的算法,可用于线性规划、非线性规划、整数规划、二次规划、多目标优化等多种优化问题。对于需要进行复杂计算和数据分析的IT专业人士来说,MATLAB优化工具箱不仅能够简化建模过程,还能快速高效地提供优化解决方案。在路径规划与调度问题的应用中,MATLAB优化工具箱为寻找最短路径、最小成本或最优调度顺序提供了强有力的支持。
# 2. 路径规划问题的理论基础
## 2.1 路径规划问题概述
路径规划问题是指在给定的环境中,找到一条从起点到终点的路径,同时满足一系列约束条件,如路径的长度、安全性、经济性等。路径规划在交通导航、机器人移动、物流运输等领域中有着广泛的应用。
### 2.1.1 路径规划问题的定义
在最简单的形式中,路径规划问题可以看作是在图中寻找两点间的最短路径。然而,现实世界中的路径规划问题要复杂得多,需要考虑多种因素,如动态障碍物、多样的地形条件以及各种资源限制。例如,在自动驾驶汽车中,路径规划不仅仅是找到一条最短路径,还要考虑交通规则、安全距离、行驶时间等约束条件。
### 2.1.2 路径规划的分类与应用场景
路径规划问题大致可以分为两类:静态路径规划和动态路径规划。静态路径规划是指在已知环境中,路径不受时间变化影响的规划;动态路径规划则需要根据实时变化的情况调整路径。
应用场景也是多样的。在室内环境中,路径规划可以用于清洁机器人的移动。在室外环境中,无人机的路径规划需要考虑风力和天气条件。而在工业领域,路径规划则帮助自动化叉车在仓库中高效作业。
## 2.2 路径规划算法理论
### 2.2.1 图论在路径规划中的应用
图论是数学的一个分支,它研究的是由点和线组成的图的性质。在路径规划中,图论提供了一种强有力的建模手段。地图可以看作是由节点(路口或转折点)和边(路段)组成的图。路径规划算法中的Dijkstra和A*算法都是基于图论的,通过计算图中两点之间的最短路径来找到最优的行驶路线。
### 2.2.2 启发式算法与元启发式算法
启发式算法是依据某种经验规则进行搜索和寻优的方法,它依赖于问题领域知识。常见的启发式算法包括贪心算法和局部搜索算法。贪心算法每一步都选择局部最优解,但不一定能保证全局最优。
元启发式算法是基于自然现象或生物行为而设计的,用以解决复杂的优化问题。这些算法通过模拟生物进化、群体行为等自然过程来寻找到问题的近似解。常见的元启发式算法包括遗传算法、粒子群优化、蚁群算法等。
### 2.2.3 A*和Dijkstra算法原理及对比
A*算法和Dijkstra算法都是在图中寻找最短路径的算法。Dijkstra算法是一种单源最短路径算法,它能够找到从一个节点到图中所有其他节点的最短路径。而A*算法则是一种启发式搜索算法,它尝试找到从起始节点到目标节点的最短路径。
两者的对比在于A*算法更加高效,因为它利用了启发式信息来预测路径成本,而Dijkstra算法则不考虑目标节点的方向。A*算法在搜索过程中会优先考虑那些看起来能更快到达目标的路径。
## 2.3 优化理论与方法
### 2.3.1 线性规划基础
线性规划是一种寻找在给定线性约束条件下,使得目标函数最大化的数学优化方法。路径规划问题中的某些约束条件和目标函数可以表示为线性形式。例如,在物流运输中,我们需要最小化运输成本,同时满足货物流通的线性约束。
### 2.3.2 非线性规划与约束优化
非线性规划是优化理论中的一个重要分支,它包括了目标函数和/或约束条件是非线性的情况。在路径规划中,如果考虑路径的非线性成本,如曲线路径的曲率约束,就可能需要使用非线性规划方法。
### 2.3.3 多目标优化简介
多目标优化问题涉及同时优化两个或多个目标函数。例如,在路径规划问题中,我们可能需要同时考虑路径的长度和时间成本,这就构成了一个典型的多目标优化问题。多目标优化的解决方案通常不是一个单一的解决方案,而是形成一系列的“帕累托最优解”。
在第二章中,我们深入了解了路径规划问题的定义、分类及其应用场景,并探讨了路径规划算法理论和优化理论。接下来,我们将聚焦于第三章,学习如何应用MATLAB优化工具箱来解决实际路径规划问题。
# 3. MATLAB优化工具箱在路径规划中的应用实践
## 3.1 利用MATLAB进行问题建模
### 3.1.1 模型构建的基础步骤
在MATLAB中构建路径规划问题模型是一个系统性的过程,需要遵循以下几个基础步骤:
1. **问题定义**:首先明确路径规划的目标和约束条件。例如,在一个简单的二维网格中,目标可能是从起点到达终点,同时路径的长度不能超过一个特定值。
2. **变量选择**:确定模型中的决策变量,如路径规划中的每个节点或者每段路径。
3. **目标函数构建**:设计一个目标函数,以数学形式表达优化目标,例如最小化路径的总长度。
4. **约束条件定义**:将问题的约束条件转化为数学表达式,如避免障碍物、路径连通性等。
5. **求解器选择**:选择适合该问题类型的求解器。在MATLAB优化工具箱中,根据问题类型(线性、非线性、整数规划等)选择不同的函数或算法。
6. **模型测试与验证**:利用测试案例验证模型的正确性,并进行必要的调整。
### 3.1.2 利用MATLAB函数和工具进行问题定义
在MATLAB中,问题定义通常涉及以下方面:
1. **定义决策变量**:例如使用 `x = optimvar('x', size)` 创建一组决策变量。
2. **建立目标函数**:通过编写一个函数句柄来表达目标函数,例如:
```matlab
function f = objectiveFunction(x)
f = x(1)^2 + x(2)^2; % 一个简单的二次目标函数
end
```
3. **定义约束条件**:可以是线性或非线性表达式,例如:
```matlab
cons1 = x(1) + x(2) <= 10;
cons2 = x(2) >= x(1)^2;
```
4. **配置求解器**:调用适当的求解函数(如 `fmincon`)并设置选项:
```matlab
options = optimoptions('fmincon','Display','iter','Algorithm','sqp');
```
5. **求解问题**:使用配置好的求解器来找到最优解:
```matlab
[x, fval] = fmincon(@objectiveFunction, x0, A, b, Aeq, beq, lb, ub, cons, options);
```
通过上述步骤,可以在MATLAB中以模块化和标准化的方式构建路径规划问题模型,并使用优化工具箱进行求解。
## 3.2 实现路径规划算法
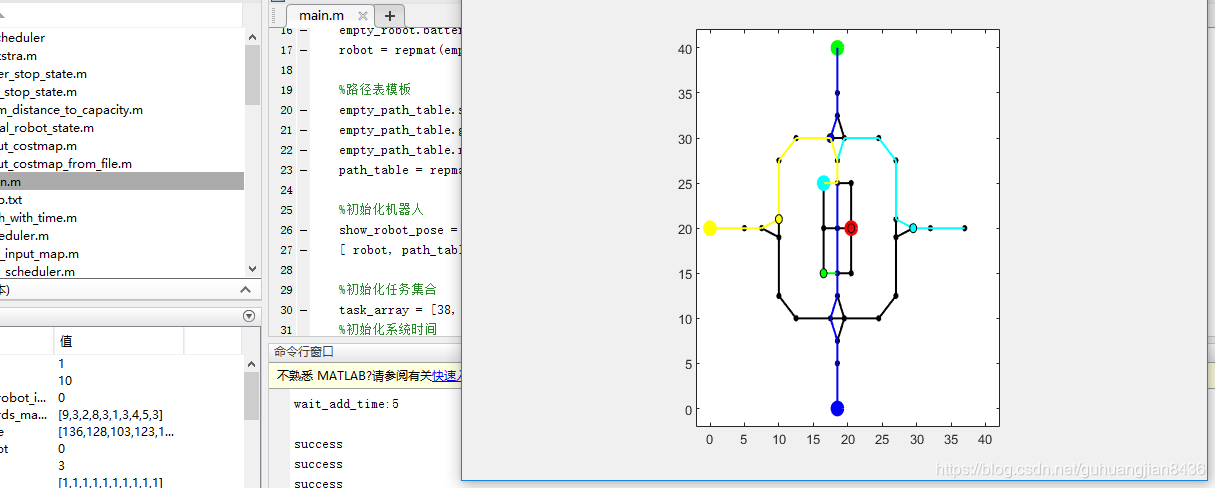
### 3.2.1 编写路径规划的MATLAB脚本
路径规划算法的编写通常涉及定义搜索空间、启发式评估函数、搜索算法等。MATLAB允许快速原型设计和代码调试,下面是一个简单的A*算法实现示例:
```matlab
function [path, cost] = AStarSearch(map, start, goal)
% map: 二维地图矩阵,0代表可通过,1代表障碍
% start: 起点坐标 [x, y]
% goal: 终点坐标 [x, y]
% 初始化开放列表和关闭列表
openList = [];
closedList = false(size(map));
startNode = Node(start, 0, heuristic(start, goal));
openList = [openList, startNode];
while ~isempty(openList)
% 从开放列表中找到最廉价的节点作为当前节点
[~, currentNodeIdx] = min([openList.endCost] + [openList.heuristic]);
curren
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《MATLAB优化工具箱的应用与实例》专栏深入探讨了MATLAB优化工具箱的广泛应用和强大功能。专栏涵盖了从线性规划到非线性优化、高级参数调优、定制化求解器构建、遗传算法集成等各个方面的实用指南和技巧。此外,还展示了优化工具箱在金融、电力系统、生物信息学等领域的创新应用。本专栏旨在为MATLAB用户提供全面的优化解决方案,帮助他们解决工程、科学和金融领域的复杂问题。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
个性化界面打造秘籍:QLabel字体样式的自定义方法
参考资源链接:[QLabel设置方法:颜色、背景色、字体及大小调整](https://wenku.csdn.net/doc/4zu6m8keeu?spm=
提高用户满意度的交易流程设计:二手交易平台流程优化案例研究

参考资源链接:[校园二手交易网站需求规格说明书](https://wenku.csdn.net/doc/2v1uyiaeu5?spm=1055.2635.3001.10343)
# 1. 交易流程设计的重要性
在当今数字时代,交易流程设计的重要性日益凸显,它直接影响用户体验、运营效率和企业的盈利能力。一个精心设计的交易流程可以简化用户的操作步
【图形处理与变量替换】:Mathematica图表美化技术揭秘
参考资源链接:[Mathematica教程:变量替换与基本操作](https://wenku.csdn.net/doc/41bu50ed0y?spm=1055.2635.3001.10343)
# 1. Mathematica中的图形处理基础
在第一章中,我们将探索Mathematica这一功能强大的计算软件在图形处理方面的基础知识。Mathematica不仅在数学计算领域备受推崇,其在图形渲染和视觉化
TSPL2指令集编程实战:创建定制化打印解决方案的3大步骤
参考资源链接:[TSPL2指令集详解:TSC条码打印机编程指南](https://wenku.csdn.net/doc/5h3qbbyzq2?spm=1055.2635.3001.10343)
# 1. TSPL2指令集编程简介
## 1.1 什么是TSPL2指令集
TSPL2(Toshiba Standard Printer Language
【设备驱动同步机制】:保障操作原子性与一致性的技巧

参考资源链接:[电子元件库Miscellaneous Devices.Intlib详解](https://wenku.csdn.net/doc/6him5trdou?spm=1055.2635.3001.10343)
# 1. 设备驱动同步机制概述
在现代操作系统中,设备驱动程序负责硬件设备和内核之间的通信。由于多线程和中断的存在,驱动程序必须正确处理并发和同步问题,以保证数据的一致性和
ISO 17987-2-2016在商用车辆中的应用:特殊考虑与实施策略
参考资源链接:[ISO 17987-2-2016.pdf](https://wenku.csdn.net/doc/6412b759be7fbd1778d49fab?spm=1055.2635.3001.10343)
# 1. ISO 17987-2-2016标准概述
在信息技术的快速发展中,标准在确保不
【PFC电感损耗全面分析】:理论预测与实际测量,优化性能的关键
参考资源链接:[Boost PFC电感计算详解:连续模式、临界模式与断续模式](https://wenku.csdn.net/doc/790zbqm1tz?spm=1055.2635.3001.10343)
# 1. PFC电感的基本概念和作用
## 1.1
3dB带宽测量新技巧:精准评估信号质量,优化数据传输

参考资源链接:[掌握3dB带宽概念:定义、计算与应用实例](https://wenku.csdn.net/doc/6xhpgdac7v?spm=1055.2635.3001.10343)
# 1. 3dB带宽测量概述
## 1.1 3dB带宽的定义
3dB带宽,也称为半功率带宽,是指信号功率下降到其峰值功率一半时的频率范围。在频域内,3dB带宽直接关系到信号的传输质量和带宽利用率。
## 1.2 测
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )