FreeRTOS任务管理:深入理解任务调度与优先级控制
发布时间: 2024-12-13 21:29:45 阅读量: 7 订阅数: 19 

FreeRTOS任务管理_FreeRTOS任务管理_freertos_freertos任务_任务管理_野火freertos_
参考资源链接:[STM32裸机+FreeRTOS V9.0.0移植教程:入门与Demo应用](https://wenku.csdn.net/doc/wffhsfydth?spm=1055.2635.3001.10343)
# 1. FreeRTOS任务管理简介
## 1.1 FreeRTOS任务管理概述
FreeRTOS是一个开源的实时操作系统内核,专为嵌入式系统设计。它能够有效地管理微处理器或微控制器上的多个任务,实现任务调度和同步等操作。任务管理是FreeRTOS的核心功能之一,它允许开发者将应用程序分解为可独立执行的小块代码,即任务。这些任务以抢占式或合作式的方式运行,通过调度器的管理,确保CPU资源的合理分配,从而提高系统的响应性和效率。
## 1.2 任务的基本概念
在FreeRTOS中,任务被定义为一个无限循环的函数,它执行应用程序中的代码。每个任务都有自己的堆栈空间,用于存储局部变量和函数调用的返回地址等。FreeRTOS使用任务控制块(TCB)来管理任务的元数据,包括任务的状态、优先级、堆栈指针以及任务函数的入口地址等。在任务创建时,系统会为每个任务分配一个TCB。
## 1.3 任务管理的关键点
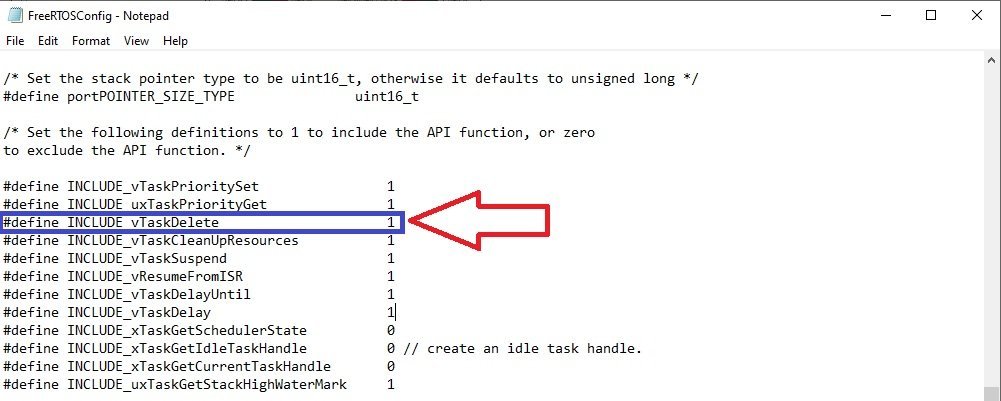
任务管理的关键点包括创建、挂起、恢复和删除任务等操作。开发者可以通过简单的API调用来实现这些操作。例如,使用`xTaskCreate`函数创建新任务,使用`vTaskSuspend`和`xTaskResume`挂起和恢复任务,最后通过`vTaskDelete`函数来删除任务。这些操作确保了任务可以按照期望的方式运行,同时也提供了在运行时动态调整任务行为的能力。
# 2. 任务调度理论基础
## 2.1 任务调度的基本概念
### 2.1.1 任务调度的定义和作用
任务调度是操作系统中的一项核心功能,它负责分配和管理计算资源,确保系统的高效运行。在多任务环境中,任务调度器决定哪个任务应该获得CPU的时间片,执行其代码。通过合理调度,可以实现多任务间的无缝切换,确保高优先级任务获得及时处理,同时保证低优先级任务的公平执行。
任务调度的作用体现在多个方面:
- **资源优化**:有效分配CPU时间,最大化资源利用率。
- **响应性**:确保高优先级任务能及时响应,提升用户体验。
- **公平性**:保证即使是低优先级任务,也能获得执行的机会。
### 2.1.2 调度策略的分类和比较
任务调度策略可以根据任务的执行方式和调度器的决策过程分类。常见的调度策略包括先来先服务(FCFS),轮转(RR),优先级调度等。
**先来先服务 (FCFS)**:按照任务到达的顺序进行服务,简单直观,但容易出现“饥饿”现象。
**轮转 (Round Robin, RR)**:将时间分为等长的时间片,轮流为任务提供服务,适用于需要时间片调度的场景。
**优先级调度**:根据任务的优先级来进行调度决策,优先级高的任务优先执行。
比较这些策略,我们可以得出:
- FCFS容易实现,但对短任务不友好;
- RR保证了任务的响应性,但增加了上下文切换的开销;
- 优先级调度满足了任务对响应时间的要求,但需要额外的优先级管理机制。
## 2.2 任务调度的数学模型
### 2.2.1 抢占式和协作式调度模型
抢占式调度(Preemptive Scheduling)允许任务被高优先级任务中断。协作式调度(Cooperative Scheduling)要求任务主动放弃控制权,才允许其他任务运行。在协作式调度中,如果一个任务出现错误或不放弃CPU,将导致整个系统停止。
### 2.2.2 调度算法的时间复杂度分析
调度算法的时间复杂度关注于算法运行时间与任务数量的关系。例如,RR算法的时间复杂度是O(n),其中n是任务数量。优先级调度算法的复杂度则取决于任务优先级的数据结构,如使用堆排序实现,时间复杂度可能达到O(log n)。
## 2.3 实时操作系统中的任务调度
### 2.3.1 实时性要求与调度策略选择
实时操作系统(RTOS)对任务的实时性有着严格要求。根据实时性的不同,有硬实时和软实时之分。硬实时系统要求严格的时间限制,而软实时系统允许偶尔的超时。
在选择调度策略时,需要综合考虑实时性要求、任务的执行时间、任务间的依赖关系等因素,以确保系统满足实时性要求。
### 2.3.2 调度的实时性分析和评估方法
实时性分析通常采用最坏情况执行时间(WCET)作为评估标准。评估方法包括:
- **离线分析**:在系统运行前,通过静态分析计算出每个任务的WCET。
- **在线监测**:在系统运行时动态监测任务执行时间,评估调度性能。
通过这些分析方法,可以帮助系统设计者理解调度策略对实时性的影响,从而做出适当的调整。
# 3. FreeRTOS任务优先级控制
## 3.1 优先级配置与管理
### 3.1.1 优先级分配原则
在实时操作系统中,任务的优先级是一个关键的参数,它决定了任务被调度执行的优先顺序。在FreeRTOS中,一个任务的优先级是固定的,即在任务创建的时候就已经确定。在配置任务优先级时,有几个原则需要遵循以保证系统的高效运行和避免潜在的死锁和优先级反转问题。
首先,需要根据任务的紧急程度以及任务对实时性的要求来分配优先级。系统中最重要的任务,或者那些不能容忍延迟的任务,应当被赋予最高的优先级。其次,优先级的分配应当考虑任务的执行时间以及在系统中可能存在的任务数量。如果一个低优先级任务执行时间过长,那么可能会导致高优先级任务饥饿(长时间得不到执行机会),从而影响系统的实时性能。
在实际应用中,还应当遵循优先级覆盖原则,即高优先级任务可以打断低优先级任务的执行,从而保证关键任务的实时性。
### 3.1.2 动态优先级调整方法
虽然FreeRTOS通常使用静态优先级分配,但在某些情况下,需要动态调整任务的优先级以应对不同的运行时情况。动态优先级调整主要通过任务的延时(例如 `vTaskDelay`)和延时到任务就绪(`vTaskDelayUntil`)来实现。
当一个任务在执行过程中需要等待一段时间完成某些操作(比如等待传感器数据),它可以主动延时。延时结束后,任务的优先级可以保持不变,也可以根据系统状态和任务的当前状态重新评估后进行调整。
更复杂的场景可能需要在任务执行期间,根据某种算法动态调整其优先级。这需要开发者自己实现优先级的修改逻辑,例如根据实时性能指标(如CPU使用率、任务完成率等)动态地提升或降低任务优先级。
## 3.2 优先级反转问题及其解决方案
### 3.2.1 优先级反转现象的成因
优先级反转是指在执行过程中,一个高优先级任务因为等待一个低优先级任务所持有的资源,而被迫等待更长的时间,导致系统整体性能下降的现象。这种现象通常发生在以下场景:
1. 低优先级任务获取了高优先级任务所需的共享资源。
2. 在低优先级任务持有资源期间,高优先级任务被调度执行。
3. 高优先级任务执行时尝试获取低优先级任务所持有的资源,但无法获取,因此被阻塞。
4. 中等优先级任务出现并开始执行,导致高优先级任务迟迟无法获得资源。
优先级反转可能导致系统中最高优先级的任务无法及时执行,从而违背了实时系统的初衷。
### 3.2.2 避免优先级反转的策略和技术
为避免优先级反转,FreeRTOS提供了几种策略和技术,其中最典型的是优先级继承协议(Priority Inheritance Protocol)和优先级天花板协议(Priority Ceiling Protocol)。
1. **优先级继承协议**:当一个高优先级任务被阻塞等待一个低优先级任务释放资源时,被阻塞的任务将临时继承低优先级任务的优先级。这样做可以减少高优先级任务等待时间,并防止中间优先级的任务干扰。继承的优先级一旦释放资源即恢复原来的优先级。
2. **优先级天花板协议**:该协议不仅适用于单个资源,而是为每个资源分配一个优先级天花板值。当任务获取资源时,它将临时获得该资源的优先级天花板值,而非仅仅获取其他任务的优先级。这种协议使得任务可以避免多次优先级提升,减少优先级翻转问题的发生。
两种协议都可以在一定程度上缓解优先级反转的问题,但它们也有各自的优势和局限性,选择哪一种往往取决于具体的应用场景和系统要求。
## 3.3 优先级继承协议和优先级天花板
### 3.3.1 优先级继承协议的原理和应用
优先级继承协议的目的是减少优先级反转所造成的系统性能影响。当一个低优先级任务持有一个高优先级任务需要的资源时,高优先级任务将被阻塞,等待资源的释放。此时,低优先级任务临时继承高优先级任务的优先级,以尽快完成执行并释放资源,减少高优先级任务的等待时间。
这个协议在实际应用中有以下特点:
- **减少阻塞时间**:通过提升低优先级任务的优先级,使得资源能够尽快被释放。
- **避免饥饿**:高优先级任务不会因为资源等待时间过长而饥饿。
- **实现简单**:相比优先级天花板协议,实现逻辑更加简单。
优先级继承协议在一些不支持优先级天花板协议的实时系统或者对实现复杂度有要求的场景下非常有用。
### 3.3.2 优先级天花板协议的原理和优势
优先级天花板协议是一种预防性的策略,它通过为每个资源定义一个固定的优先级天花板值,当任务获取这个资源时,临时提升任务的优先级到该天花板值。
这种策略有以下几个优点:
- **预防性**:在任务获取资源前,提升任务优先级到天花板值,预防低优先级任务因资源被占用而造成高优先级任务的等待。
- **减少优先级提升次数**:在资源竞争频繁的系统中,优先级继承协议可能需要频繁地进行优先级提升,而优先级天花板协议只需在资源获取时提升一次。
- **实现复杂度适中**:比优先级继承协议复杂,但比其他复杂策略简单。
优先级天花板协议适用于任务数量多且资源竞争激烈的系统,尤其适合于那些要求高性能和强实时性的嵌入式系统中。
# 4. 任务调度的实践应用
## 4.1 FreeRTOS中任务的创建和管理
### 4.1.1 任务的创建函数和控制块
在FreeRTOS中,任务的创建和管理是实现多任务操作的基础。每个任务在创建时都会被分配一个任务控制块(Task Control Block,TCB),该控制块用于存储任务的状态信息、堆栈空间以及与任务相关的其他数据结构。
创建任务时,通常会使用 `xTaskCreate` 或 `xTaskCreateStatic` 函数。这两个函数都允许开发者指定任务的入口函数、任务堆栈大小、任务优先级和任务句柄等参数。
```c
BaseType_t xTaskCreate(
TaskFunction_t pvTaskCode,
const char * const pcName,
configSTACK_DEPTH_TYPE usStackDepth,
void *pvParameters,
UBaseType_t uxPriority,
TaskHandle_t *pxCreatedTask
);
```
上述代码中,`pvTaskCode` 是任务的入口函数指针;`pcName` 为任务名称,用于调试;`usStackDepth` 定义了任务堆栈的大小;`pvParameters` 提供了传递给任务入口函数的参数;`uxPriority` 设置任务的优先级;`pxCreatedTask` 用于返回创建的任务句柄。
### 4.1.2 任务的挂起、恢复与删除
任务挂起和恢复是控制任务执行流程的常见操作。在FreeRTOS中,使用 `vTaskSuspend` 和 `xTaskResume` 函数可以实现对任务的挂起和恢复。
```c
void vTaskSuspend( TaskHandle_t xTaskToSuspend );
void vTaskResume( TaskHandle_t xTaskToResume );
```
其中 `xTaskToSuspend` 是需要被挂起的任务句柄,而 `xTaskToResume` 是需要被恢复的任务句柄。挂起和恢复操作允许系统在特定条件下控制任务的执行。
任务的删除同样是一项重要操作。可以使用 `vTaskDelete` 函数删除任务:
```c
void vTaskDelete( TaskHandle_t xTaskToDelete );
```
参数 `xTaskToDelete` 为要删除的任务句柄。任务被删除后,其堆栈空间会被释放,TCB会被销毁,任务相关的所有资源都会被清理。
在实际开发中,以上函数应当谨慎使用。不当的挂起或删除任务可能导致系统资源管理不当,甚至出现死锁等严重问题。
## 4.2 实际应用案例分析
### 4.2.1 嵌入式系统中的任务调度示例
嵌入式系统中任务调度的一个典型例子是智能家居控制系统。在这种系统中,不同的任务可能包括环境监测、设备控制、用户界面更新等。在这样的系统里,任务通常由传感器数据驱动,以确保及时响应外部事件。
在具体实现时,智能家居控制器可能会使用一个高优先级的任务来监测传感器数据。例如,烟雾探测器的任务需要快速响应,以便在检测到烟雾时立即通知用户或自动启动排风扇。
```c
void vFireAlarmTask( void *pvParameters ) {
while(1) {
if (SensorDataIsSmokeDetected()) {
NotifyUserOrActivateFan();
}
vTaskDelay(pdMS_TO_TICKS(1000)); // 每秒检查一次
}
}
```
在这个例子中,`SensorDataIsSmokeDetected` 是检测烟雾的函数,`NotifyUserOrActivateFan` 是通知用户或激活排风扇的函数,`vTaskDelay` 用于挂起当前任务一秒钟。
### 4.2.2 调度策略的选择与性能优化
在选择调度策略时,必须充分考虑任务的实时性和系统资源的限制。例如,如果一个任务需要严格遵守响应时间,那么应该选择一个合适的固定优先级抢占式调度策略。在不同的应用中,调度器配置和任务优先级分配必须基于最坏情况下的时间分析。
性能优化可以从调度策略出发,例如,采用时间片轮转算法(Round-Robin)来保证任务按顺序和时间间隔执行。另外,一些非实时性任务可以设置为最低优先级,以减少对实时任务的影响。
```c
void vNonRealTimeTask( void *pvParameters ) {
while(1) {
PerformBackgroundOperation();
vTaskDelay(pdMS_TO_TICKS(500)); // 低优先级任务,间隔半秒执行
}
}
```
其中,`PerformBackgroundOperation` 是执行非实时操作的函数。这样的任务应当谨慎设计,以免影响实时任务的执行。
## 4.3 调度器的配置和优化技巧
### 4.3.1 调度器配置对系统性能的影响
调度器的配置对整个系统的性能有着深远的影响。不当的配置可能会导致任务处理延迟增加,甚至造成任务饥饿,即某些任务长时间得不到执行的机会。
为了达到最优性能,系统设计师应当根据实际应用场景和硬件能力进行调度器的配置。对于资源受限的嵌入式系统,可能需要更加细致地配置任务堆栈大小和调度器时钟频率,以确保任务能够以预期的频率调度执行。
```c
void vConfigureTimerForRunTimeStats( void ) {
// 配置时钟频率和堆栈检测代码
}
```
### 4.3.2 调度器优化策略的探讨与实践
优化调度器策略的一个关键点是任务优先级的合理分配。通常,具有最高实时性要求的任务应该被赋予最高优先级。此外,动态优先级调整策略在某些情况下可以提升系统的响应能力,尤其是当系统负载不均匀时。
优化的另一个方面是减少任务切换的开销。在FreeRTOS中,可以通过调整时间片大小和优化任务的执行顺序来实现。例如,具有相似行为的任务可以放在同一个优先级,以减少上下文切换次数。
```c
void vOptimizeTaskScheduling( void ) {
// 优化任务调度代码
}
```
具体实践中,根据任务的执行时间和频率,调整任务的优先级和时间片,以确保系统资源得到最优利用。
# 5. 深入探索FreeRTOS优先级管理机制
在实时操作系统中,优先级管理是至关重要的部分,它直接关联到任务的执行效率和系统资源的分配。FreeRTOS作为一款流行的实时操作系统,提供了高效的优先级管理机制,其核心在于通过优先级分组和动态优先级调整,以实现任务调度的优化。本章我们将深入探讨FreeRTOS中的优先级管理机制,并展望未来技术发展对优先级管理可能带来的影响。
## 5.1 优先级分组与任务队列
### 5.1.1 优先级分组概念及其实现
在FreeRTOS中,优先级分组允许将8位优先级拆分为不同的组。每个组内可以有若干个子优先级,这样能够支持大量的任务同时运行。通过优先级分组,系统能够根据任务的实际需求调整任务执行的优先级,确保高优先级的任务能够得到及时处理。
```c
// 优先级分组的API示例
BaseType_t xTaskCreate(
TaskFunction_t pxTaskCode,
const char * const pcName,
const uint16_t usStackDepth,
void *pvParameters,
UBaseType_t uxPriority,
TaskHandle_t *pxCreatedTask
);
```
代码中的 `uxPriority` 参数即用于设定任务的优先级。通过这种方式,FreeRTOS允许用户设置一个优先级分组,通过API配置任务的优先级,实现对系统资源的高效管理。
### 5.1.2 任务队列的工作原理和管理
任务队列是FreeRTOS中管理任务执行顺序的机制。任务根据优先级被放置在不同的队列中,由调度器决定哪个任务被选中执行。任务队列通常包括就绪队列、延时队列和阻塞队列,每种队列对应不同类型的任务状态。任务的管理包括创建、删除、挂起、恢复等操作,调度器根据这些状态实时更新任务队列,保证系统资源的最优化分配。
```c
// 任务队列中的操作示例
void vTaskDelay( const TickType_t xTicksToDelay );
```
此函数 `vTaskDelay` 使当前任务延迟执行指定的系统时钟周期,系统调度器会根据这一操作更新任务的状态,并调整队列的顺序。
## 5.2 高级优先级控制策略
### 5.2.1 实时内核中的动态优先级算法
FreeRTOS的动态优先级算法允许任务在运行过程中根据需要动态调整优先级。这种机制特别适用于那些响应外部事件或完成某些特定任务时需要临时提升优先级的场景。
```c
// 动态优先级调整的API示例
void vTaskPrioritySet( TaskHandle_t xTask, UBaseType_t uxNewPriority );
```
通过 `vTaskPrioritySet` 函数可以修改任务的当前优先级,从而使任务得到调度器的更多关注。
### 5.2.2 队列和同步机制中的优先级运用
队列和同步机制是FreeRTOS中重要的组成部分,它们允许任务之间以及任务与中断之间进行有效的通信。在这些机制中,优先级的使用使得系统能够处理更为复杂的并发场景。例如,具有较高优先级的任务可以优先从队列中获取数据,或者在信号量资源竞争中优先获得控制权。
```c
// 使用队列的示例
QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength, UBaseType_t uxItemSize );
```
这里创建了一个队列,并隐含地涉及到了优先级管理,因为队列中的数据处理会根据任务的优先级顺序执行。
## 5.3 优先级管理的未来展望
### 5.3.1 新兴技术对优先级管理的影响
随着技术的发展,新兴的计算模式如边缘计算、云计算等对实时操作系统提出了新的要求。在这些新的计算模式中,优先级管理将不得不考虑如何平衡本地资源和远程资源的使用,以及如何应对更大规模的任务调度。
### 5.3.2 优先级管理在物联网中的应用前景
物联网(IoT)设备的数量不断增长,这些设备多数依赖于实时操作系统提供高效率、低延迟的服务。在IoT场景中,优先级管理机制将被用来优化设备之间的通信、确保数据传输的实时性以及提高系统的整体可靠性。
未来,FreeRTOS的优先级管理机制将不断演化以适应这些新兴领域的需求,如提供更高级别的抽象、更细粒度的资源控制以及更高效的多核处理器支持。随着人工智能(AI)和机器学习(ML)技术的整合,我们有理由相信,优先级管理将变得更智能、更自动,并能自我优化,以适应变化的运行环境。
请注意,本章内容尚未涵盖对整个优先级管理机制的全面分析,上述内容仅提供了对特定部分的深入探讨。随着技术的持续进步,FreeRTOS的优先级管理将不断被优化和改进,以应对更复杂的系统需求。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 FreeRTOS 内核的应用开发,涵盖了从入门教程到高级主题。它提供了对任务管理、内存管理、队列通信、信号量、互斥量、定时器、堆栈使用、性能优化、内存泄漏、低功耗策略、线程安全、版本控制、多核处理器应用、硬件抽象层、性能基准测试以及医疗设备中的应用等方面的全面指导。通过深入浅出的讲解和丰富的示例,该专栏旨在帮助开发人员充分利用 FreeRTOS 的强大功能,构建高效、可靠且可维护的嵌入式实时系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
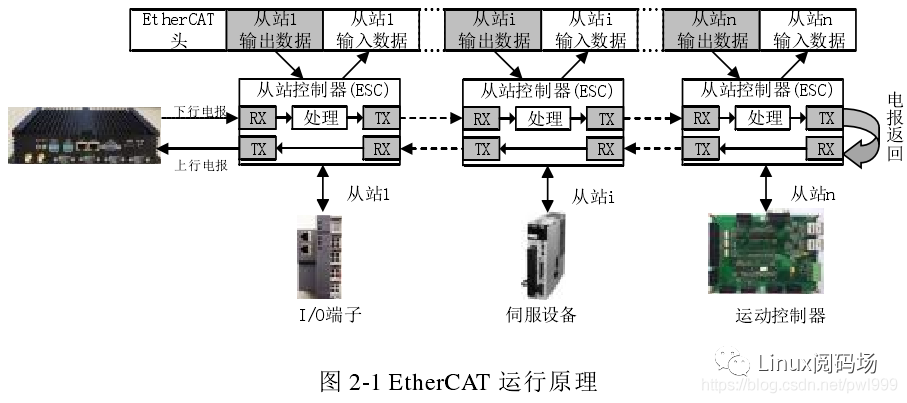
工业自动化升级秘籍:高效配置与调试EtherCAT ETG.2000 V1.0.10
# 摘要
本文全面介绍了EtherCAT技术及其ETG.2000 V1.0.10标准的具体应用。首先概述了EtherCAT技术的基本概念和ETG.2000 V1.0.10的简介,接着详细阐述了如何进行EtherCAT网络的配置,包括网络拓扑的构建、主站与从站的配置及初始化设置,以及整体系统的调
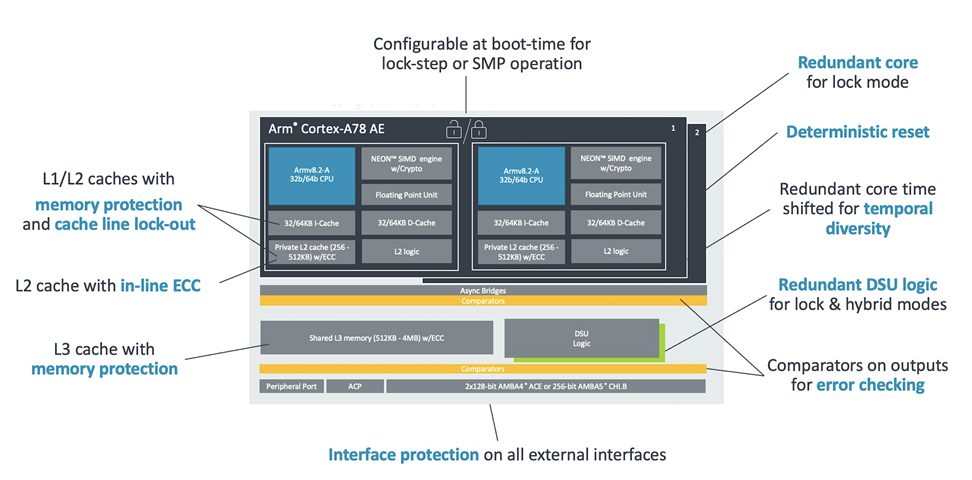
【深度剖析】凌博控制器LBMC072202HA2X-M2-D:掌握硬件架构与性能提升之道
# 摘要
凌博控制器LBMC072202HA2X-M2-D是集成了先进硬件技术和优化策略的高性能控制器。本文首先概述了该控制器的硬件特性,随后深入解析了其硬件架构,包括核心处理
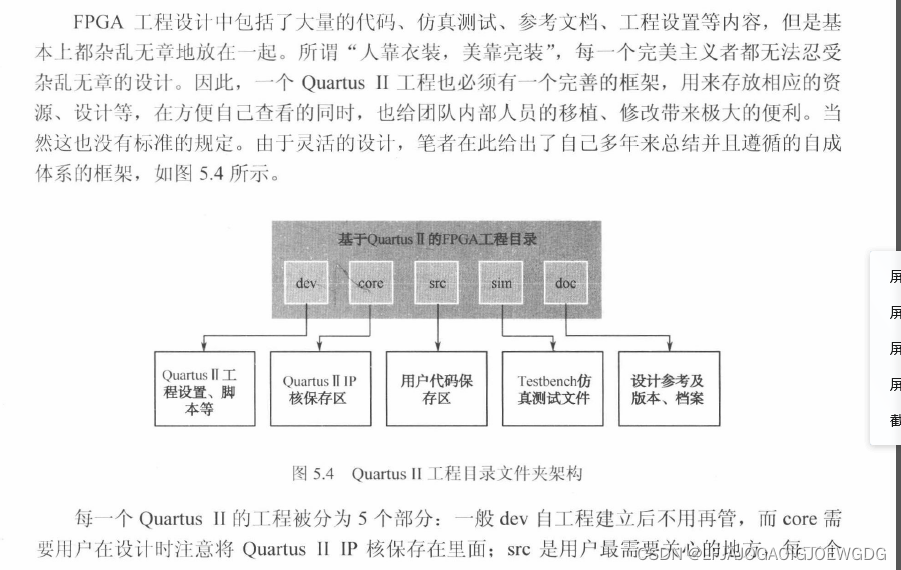
【Quartus II 7.2新手快速入门】:掌握安装、配置与项目管理
# 摘要
本文全面介绍了Quartus II 7.2的设计、配置和使用,涵盖了从软件安装到项目管理、设计输入、仿真以及F
铁路货运安全管理:示意图在风险评估中的决定性作用

# 摘要
本文旨在全面探讨铁路货运安全管理中的风险评估理论及示意图技术的应用。首先介绍了铁路货运风险的分类及其特征,并详细阐述了风险评估的流程和方法论。接着,文章重点分析了示意图在风险识别、评估和数据集成中的关键作用,并探讨了其制作与应用实践。第五章提出了一系列基于示意图的风险评估实操策略,以及评估前的准备工作和风险应对建议。最后,文章总结了风险评估理论与实践的融合,并展望了示意图技术的发展趋势。本研究不仅提升了铁路货运风险评估的科学
【硬件软件协同秘籍】:计算机系统设计的基础与融合之道

# 摘要
本文全面介绍了计算机系统设计的各个方面,从硬件基础与软件架构的理论原则,到操作系统与硬件的交互机制,再到硬件加速技术的软件实现。通过探讨GPU和FPGA等硬件加速技术在AI和ML领域中的应用,文章着重分析了系统集成、测试、性能优化以及质量保证的重要性。同时,本文对计算机系统设计面临的未来挑战与发展方向进行了前瞻性探讨,包括新型硬件技术的发展趋势、软件工程的创新路径和系统安全与隐私保护的新策略。本文旨在为计
UR机器人自动化流程:3.33版本的高效工作案例
# 摘要
本文全面概述了UR机器人在自动化流程中的应用,详细介绍了UR机器人的基本构成、工作原理以及自动化流程设计的理论基础。通过对UR机器人3.33版本特点的深入分析,本文探讨了实操应用的硬件和软件配置、程序编写与调试以及自动化流程的构建与优化。通过案例研究,本文展示了UR机器人在生产线自动化改造和复杂组装任务中的高效应用,并总结了其成功经验和可复制性。最后,本文讨论了自动化流程面临的挑战,并展望了未来发展
【联阳IT6616芯片多媒体处理技巧】:让你的应用栩栩如生

# 摘要
本文全面介绍了联阳IT6616芯片的多媒体处理特性及其在实践中的应用。首先概述了IT6616芯片的基本架构和多媒体数据格式处理基础,包括视频、音频及图像格式的相关知识。随后,详细分析了IT6616芯片的硬件加速功能、编程接口和开发工具,探讨了其在视频播放处理、音频处理和图像处理与显示中的具体应用。最后,文章通过搭建高级多媒体框架和处理优化多媒体数据流的实际案例,探讨了该芯片在互动展
【西门子PLCSIM与WINCC通讯】:性能优化秘籍,提升通讯效率(通讯效率提升指南)
# 摘要
西门子PLCSIM与WINCC通讯基础是工业自动化领域中实现系统集成和控制的关键技术。本文详细探讨了PLCSIM与WINCC之间的通讯机制,重点分析了通信协议、变量连接、实时数据交换处理以及性能优化策略。深入理解这些机制对于提高生产效率和系统可靠
Unity资源管理专家:精通资源文件夹分类,提升开发效率!
# 摘要
本文对Unity引擎中的资源管理进行了全面探讨,涵盖了从基础的文件夹分类方法到高级的性能优化技巧,旨在提供一套高效的Unity资源管理解决方案。文章首先概述了Unity资源管理的基本概念和重要性,接着详细介绍了资源文件夹的逻辑分类方法、组织技巧及维护更新策略。在实践技巧部分,文章探讨了如何通过场景资源管理、预制体和动态资源加载来提升开发效率。进阶应用章节则着重于自定义资源加载器的编写、自动化资源处理以及性能优化。最后,通过案例分析展示了在大型项目和跨平台项目中资源管理的策略,并对资源管理的未来趋势进行了展望,特别是云资源管理和AI在资源管理中的应用。
# 关键字
Unity资源管理
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )