单片机步进电机控制系统应用案例大全:工业自动化、医疗设备等,拓展应用领域
发布时间: 2024-07-14 05:27:54 阅读量: 65 订阅数: 23 

# 1. 单片机步进电机控制系统概述**
单片机步进电机控制系统是一种利用单片机对步进电机进行控制的系统。步进电机是一种将电脉冲信号转换为角位移或线位移的电机,具有精度高、响应快、控制方便等优点。单片机步进电机控制系统广泛应用于工业自动化、医疗设备、智能家居等领域。
本系统采用单片机作为控制核心,通过接收外部控制信号或指令,对步进电机进行控制。单片机内部集成了各种外围接口,可以方便地与传感器、驱动器等外围器件进行连接。通过软件编程,可以实现步进电机的各种控制算法,如开环控制、闭环控制等。
# 2. 步进电机控制原理与算法
### 2.1 步进电机的工作原理
步进电机是一种将电脉冲信号转换为机械角位移的机电一体化装置。其工作原理基于磁场相互作用。步进电机内部由定子和转子组成,定子绕组产生旋转磁场,转子由永磁体组成。当定子绕组通电时,会产生一个旋转磁场,转子上的永磁体受旋转磁场的吸引,从而转动一个步距角。
### 2.2 步进电机控制算法
步进电机控制算法决定了电机转动的精度和稳定性。主要分为开环控制算法和闭环控制算法。
#### 2.2.1 开环控制算法
开环控制算法不使用反馈信号,直接根据输入的脉冲信号控制电机的转动。常见的开环控制算法有:
- **全步进控制:**每个脉冲信号驱动电机转动一个步距角。
- **半步进控制:**每个脉冲信号驱动电机转动半个步距角,提高了转动精度。
- **微步进控制:**将一个步距角细分为更小的步长,进一步提高转动精度。
#### 2.2.2 闭环控制算法
闭环控制算法使用反馈信号来调整电机的转动,提高控制精度和稳定性。常见的闭环控制算法有:
- **位置闭环控制:**使用位置传感器检测电机的实际转角,并与目标转角进行比较,调整控制信号以消除误差。
- **速度闭环控制:**使用速度传感器检测电机的转速,并与目标转速进行比较,调整控制信号以消除误差。
- **力矩闭环控制:**使用力矩传感器检测电机的输出力矩,并与目标力矩进行比较,调整控制信号以消除误差。
### 2.3 步进电机驱动器设计
步进电机驱动器是连接单片机和步进电机之间的接口,负责放大单片机的控制信号并驱动电机。驱动器设计主要考虑以下因素:
- **驱动器类型:**有单极驱动器和双极驱动器,根据电机的类型选择合适的驱动器。
- **驱动器参数:**包括额定电流、最大电压、工作频率等,应与电机参数匹配。
- **保护功能:**包括过流保护、过压保护、短路保护等,以确保驱动器和电机的安全。
**代码示例:**
```c
// 全步进控制
void step_full(int steps) {
for (int i = 0; i < steps; i++) {
// 顺序激活定子绕组
GPIO_SetBits(GPIOA, GPIO_Pin_0);
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
GPIO_ResetBits(GPIOA, GPIO_Pin_3);
// 等待一个步距角的时间
Delay(1000);
// 循环执行
}
}
```
**代码逻辑分析:**
该代码实现了全步进控制算法。循环执行步骤,每次激活一个定子绕组,并等待一个步距角的时间,从而驱动电机转动。
# 3. 单片机步进电机控制系统硬件设计
### 3.1 单片机选择与系统架构
单片机是单片机步进电机控制系统中的核心部件,负责控制步进电机的运动。选择单片机时,需要考虑以下因素:
- **性能:**单片机需要具有足够的处理能力和存储空间来实现控制算法和通信协议。
- **外设:**单片机需要具有足够的I/O口和定时器等外设,以便连接步进电机驱动器、传感器和人机交互设备。
- **成本:**单片机需要在性能和成本之间取得平衡。
常见的单片机选择包括:
| 单片机型号 | 架构 | 时钟频率 | I/O口数 | 定时器数 |
|---|---|---|---|---|
| STM32F103C8T6 | ARM Cortex-M3 | 72MHz | 32 | 3 |
| MSP430F5529 | MSP430 | 25MHz | 26 | 2 |
| ATmega328P | AVR | 20MHz | 26 | 3 |
系统架构通常采用主从结构,单片机作为主控制器,负责控制步进电机的运动和通信,而从设备(如传感器、驱动器)负责执行具体任务。
### 3.2 步进电机驱动电路设计
步进电机驱动电路负责向步进电机提供驱动电流,控制其运动。驱动电路的设计需要考虑以下因素:
- **驱动器类型:**有单极驱动、双极驱动和全桥驱动等多种驱动器类型可供选择。
- **驱动器参数:**驱动器需要选择合适的电压、电流和功率参数,以满足步进电机的要求。
#### 3.2.1 驱动器类型
- **单极驱动:**使用单个电源供电,结构简单,成本低,但效率较低。
- **双极驱动:**使用两个电源供电,效率较高,但结构复杂,成本较高。
- **全桥驱动:**使用四个开关器件组成H桥结构,效率最高,但成本也最高。
#### 3.2.2 驱动器参数选择
驱动器参数选择需要根据步进电机的参数和应用要求确定:
- **电压:**驱动器电压应高于步进电机额定电压。
- **电流:**驱动器电流应大于步进电机额定电流。
- **功率:**驱动器功率应大于步进电机额定功率。
### 3.3 传感器与反馈电路设计
传感器和反馈电路用于监测步进电机的运动状态,并向单片机提供反馈信息。常见的传感器包括:
- **霍尔传感器:**检测步进电机转子的位置。
- **光电编码器:**检测步进电机转子的速度和位置。
反馈电路将传感器信号转换为数字信号,并传输给单片机。单片机根据反馈信息调整控制算法,以实现闭环控制。
#### 代码示例:
```c
// 初始化霍尔传感器
void hall_init() {
// 配置霍尔传感器引脚为输入
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_PIN_HALL;
GPIO_InitStructure.GPIO_Mode = GPIO_MODE_IN;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
// 读取霍尔传感器状态
uint8_t hall_read() {
// 读取霍尔传感器引脚电平
return GPIO_ReadInputDataBit(GPIOA, GPIO_PIN_HALL);
}
```
#### 流程图:
```mermaid
graph LR
subgraph 单片机
单片机选择
系统架构
end
subgraph 步进电机驱动电路
驱动器类型
驱动器参数选择
end
subgraph 传感器与反馈电路
传感器选择
反馈电路设计
end
```
# 4. 单片机步进电机控制系统软件设计
### 4.1 控制算法软件实现
#### 4.1.1 开环控制算法实现
开环控制算法的软件实现主要包括:
- **步进脉冲生成:**根据给定的速度和加速度参数,计算出步进脉冲的频率和占空比,并通过单片机的定时器或PWM模块生成相应的脉冲信号。
- **方向控制:**根据控制指令,设置步进电机驱动器的方向引脚,控制步进电机的旋转方向。
- **加减速控制:**通过调整步进脉冲的频率或占空比,实现步进电机的加减速控制。
**代码块:**
```c
// 步进脉冲生成
void step_pulse_generate(float speed, float acceleration) {
// 计算脉冲频率和占空比
float frequency = speed / (step_angle * acceleration);
float duty_cycle = acceleration / (speed * 2);
// 设置定时器或PWM模块参数
timer_set_frequency(frequency);
timer_set_duty_cycle(duty_cycle);
// 启动定时器或PWM模块
timer_start();
}
// 方向控制
void direction_control(int direction) {
// 设置步进电机驱动器的方向引脚
if (direction == CW) {
GPIO_SetBits(GPIOB, GPIO_Pin_1);
} else if (direction == CCW) {
GPIO_ResetBits(GPIOB, GPIO_Pin_1);
}
}
// 加减速控制
void speed_control(float speed, float acceleration) {
// 计算新的脉冲频率和占空比
float new_frequency = speed / (step_angle * acceleration);
float new_duty_cycle = acceleration / (speed * 2);
// 逐渐调整脉冲频率和占空比
while (frequency != new_frequency || duty_cycle != new_duty_cycle) {
if (frequency < new_frequency) {
frequency += 0.1;
} else if (frequency > new_frequency) {
frequency -= 0.1;
}
if (duty_cycle < new_duty_cycle) {
duty_cycle += 0.1;
} else if (duty_cycle > new_duty_cycle) {
duty_cycle -= 0.1;
}
// 更新定时器或PWM模块参数
timer_set_frequency(frequency);
timer_set_duty_cycle(duty_cycle);
}
}
```
**逻辑分析:**
- `step_pulse_generate` 函数根据给定的速度和加速度参数,计算出步进脉冲的频率和占空比,并通过定时器或PWM模块生成相应的脉冲信号。
- `direction_control` 函数根据控制指令,设置步进电机驱动器的方向引脚,控制步进电机的旋转方向。
- `speed_control` 函数通过逐渐调整脉冲频率和占空比,实现步进电机的加减速控制。
#### 4.1.2 闭环控制算法实现
闭环控制算法的软件实现主要包括:
- **位置检测:**通过编码器或其他传感器获取步进电机的实际位置。
- **位置误差计算:**将实际位置与目标位置进行比较,计算出位置误差。
- **PID 控制:**根据位置误差,利用 PID 控制算法计算出控制输出,并调整步进电机的速度和方向。
**代码块:**
```c
// 位置检测
float position_detect() {
// 读取编码器或其他传感器的数据
int encoder_value = encoder_read();
// 将编码器值转换为实际位置
float position = encoder_value * step_angle;
return position;
}
// 位置误差计算
float position_error_calculate(float target_position) {
// 计算实际位置与目标位置的差值
float position_error = target_position - position_detect();
return position_error;
}
// PID 控制
float pid_control(float position_error) {
// 计算 PID 控制输出
float control_output = pid_controller.compute(position_error);
return control_output;
}
```
**逻辑分析:**
- `position_detect` 函数通过读取编码器或其他传感器的数据,获取步进电机的实际位置。
- `position_error_calculate` 函数将实际位置与目标位置进行比较,计算出位置误差。
- `pid_control` 函数利用 PID 控制算法,根据位置误差计算出控制输出,并调整步进电机的速度和方向。
### 4.2 通信协议与数据处理
#### 4.2.1 通信协议设计
单片机步进电机控制系统通常需要与上位机或其他设备进行通信,因此需要设计通信协议。通信协议应包括:
- **帧格式:**定义数据帧的结构,包括帧头、帧尾、数据域等。
- **数据类型:**定义数据域中数据的类型,如整数、浮点数、字符串等。
- **通信方式:**定义通信方式,如串口、CAN 总线等。
**表格:通信协议帧格式**
| 字段 | 长度 | 描述 |
|---|---|---|
| 帧头 | 1 字节 | 固定值,表示帧的开始 |
| 数据长度 | 1 字节 | 数据域的长度 |
| 数据域 | 可变长度 | 存放数据 |
| 校验和 | 1 字节 | 数据域的校验和 |
| 帧尾 | 1 字节 | 固定值,表示帧的结束 |
#### 4.2.2 数据采集与处理
单片机步进电机控制系统需要采集步进电机的状态数据,如位置、速度、电流等,并进行处理。数据处理包括:
- **数据过滤:**对采集到的数据进行滤波处理,去除噪声和干扰。
- **数据转换:**将采集到的原始数据转换为需要的格式,如整数、浮点数等。
- **数据存储:**将处理后的数据存储在单片机的内存或外部存储器中。
**流程图:数据采集与处理流程**
```mermaid
sequenceDiagram
participant 单片机
participant 上位机
单片机->>上位机: 发送数据采集请求
上位机->>单片机: 发送数据
单片机->>单片机: 数据过滤
单片机->>单片机: 数据转换
单片机->>单片机: 数据存储
```
# 5. 单片机步进电机控制系统应用案例
在工业自动化、医疗设备、智能家居和新能源汽车等领域,单片机步进电机控制系统有着广泛的应用。本章节将介绍几个典型的应用案例,展示单片机步进电机控制系统的实际应用场景和技术要点。
### 5.1 工业自动化应用
在工业自动化领域,单片机步进电机控制系统主要用于数控机床和机器人控制。
#### 5.1.1 数控机床控制
在数控机床中,步进电机用于控制机床的进给轴和主轴。单片机负责接收数控程序,解析指令,并根据指令控制步进电机运动。为了实现高精度的控制,通常采用闭环控制算法,通过传感器反馈电机实际位置,并与目标位置进行比较,调整控制指令。
```c++
// 数控机床步进电机控制算法
void CNC_StepperMotorControl(float target_position, float current_position) {
// 计算位置误差
float error = target_position - current_position;
// 根据误差调整控制指令
float control_signal = PID_Controller(error);
// 输出控制指令到驱动器
StepperMotorDriver_SetControlSignal(control_signal);
}
```
#### 5.1.2 机器人控制
在机器人中,步进电机用于控制机器人的关节运动。单片机负责解析机器人运动指令,并根据指令控制步进电机运动。为了实现流畅和协调的运动,通常采用开环控制算法,通过预先计算好的运动轨迹控制步进电机运动。
```c++
// 机器人步进电机控制算法
void Robot_StepperMotorControl(float target_angle, float current_angle) {
// 计算角度误差
float error = target_angle - current_angle;
// 根据误差计算步进数
int steps = error / STEP_ANGLE;
// 输出步进指令到驱动器
StepperMotorDriver_SetSteps(steps);
}
```
### 5.2 医疗设备应用
在医疗设备领域,单片机步进电机控制系统主要用于手术机器人和医疗器械控制。
#### 5.2.1 手术机器人控制
在手术机器人中,步进电机用于控制机器人的手臂和手术器械。单片机负责接收手术医生的指令,并根据指令控制步进电机运动。为了实现精细和准确的控制,通常采用闭环控制算法,通过传感器反馈手术器械的实际位置,并与目标位置进行比较,调整控制指令。
```c++
// 手术机器人步进电机控制算法
void SurgicalRobot_StepperMotorControl(float target_position, float current_position) {
// 计算位置误差
float error = target_position - current_position;
// 根据误差调整控制指令
float control_signal = PID_Controller(error);
// 输出控制指令到驱动器
StepperMotorDriver_SetControlSignal(control_signal);
}
```
#### 5.2.2 医疗器械控制
在医疗器械中,步进电机用于控制医疗器械的运动,如输液泵、呼吸机和麻醉机。单片机负责接收医生的指令,并根据指令控制步进电机运动。为了实现稳定的和可靠的控制,通常采用开环控制算法,通过预先计算好的运动轨迹控制步进电机运动。
```c++
// 医疗器械步进电机控制算法
void MedicalDevice_StepperMotorControl(float target_speed, float current_speed) {
// 计算速度误差
float error = target_speed - current_speed;
// 根据误差调整控制指令
float control_signal = PID_Controller(error);
// 输出控制指令到驱动器
StepperMotorDriver_SetControlSignal(control_signal);
}
```
# 6. 单片机步进电机控制系统拓展应用
单片机步进电机控制系统不仅在工业和医疗领域有着广泛的应用,在智能家居和新能源汽车领域也得到了广泛的拓展。
### 6.1 智能家居应用
#### 6.1.1 智能窗帘控制
智能窗帘控制系统采用单片机步进电机控制技术,实现窗帘的自动开合。系统通过传感器检测光照强度,并根据预设的程序控制步进电机驱动窗帘的开合。
```python
import RPi.GPIO as GPIO
import time
# 设置GPIO引脚
step_pin = 17
dir_pin = 18
enable_pin = 27
# 初始化GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(step_pin, GPIO.OUT)
GPIO.setup(dir_pin, GPIO.OUT)
GPIO.setup(enable_pin, GPIO.OUT)
# 设置步进电机方向
GPIO.output(dir_pin, GPIO.HIGH)
# 设置步进电机使能
GPIO.output(enable_pin, GPIO.LOW)
# 控制步进电机转动
for i in range(200):
GPIO.output(step_pin, GPIO.HIGH)
time.sleep(0.001)
GPIO.output(step_pin, GPIO.LOW)
time.sleep(0.001)
# 禁用步进电机
GPIO.output(enable_pin, GPIO.HIGH)
# 清理GPIO
GPIO.cleanup()
```
#### 6.1.2 智能门锁控制
智能门锁控制系统采用单片机步进电机控制技术,实现门锁的自动开锁。系统通过键盘或指纹识别模块输入密码或指纹,并控制步进电机驱动门锁的开锁。
```python
import RPi.GPIO as GPIO
import time
# 设置GPIO引脚
lock_pin = 17
unlock_pin = 18
# 初始化GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(lock_pin, GPIO.OUT)
GPIO.setup(unlock_pin, GPIO.OUT)
# 控制门锁开锁
if password_correct:
GPIO.output(unlock_pin, GPIO.HIGH)
time.sleep(1)
GPIO.output(unlock_pin, GPIO.LOW)
else:
GPIO.output(lock_pin, GPIO.HIGH)
time.sleep(1)
GPIO.output(lock_pin, GPIO.LOW)
# 清理GPIO
GPIO.cleanup()
```
### 6.2 新能源汽车应用
#### 6.2.1 电动汽车电机控制
电动汽车电机控制系统采用单片机步进电机控制技术,实现电动汽车电机的速度和扭矩控制。系统通过传感器检测电机转速和电流,并控制步进电机驱动电机的转动。
```python
import RPi.GPIO as GPIO
import time
# 设置GPIO引脚
pwm_pin = 17
dir_pin = 18
# 初始化GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(pwm_pin, GPIO.OUT)
GPIO.setup(dir_pin, GPIO.OUT)
# 设置PWM频率
pwm = GPIO.PWM(pwm_pin, 1000)
# 控制电机转速
pwm.start(50)
# 控制电机方向
GPIO.output(dir_pin, GPIO.HIGH)
# 清理GPIO
GPIO.cleanup()
```
#### 6.2.2 混合动力汽车电机控制
混合动力汽车电机控制系统采用单片机步进电机控制技术,实现混合动力汽车发动机的启动和停止。系统通过传感器检测汽车的运行状态,并控制步进电机驱动发动机的启动或停止。
```python
import RPi.GPIO as GPIO
import time
# 设置GPIO引脚
start_pin = 17
stop_pin = 18
# 初始化GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(start_pin, GPIO.OUT)
GPIO.setup(stop_pin, GPIO.OUT)
# 控制发动机启动
GPIO.output(start_pin, GPIO.HIGH)
time.sleep(1)
GPIO.output(start_pin, GPIO.LOW)
# 控制发动机停止
GPIO.output(stop_pin, GPIO.HIGH)
time.sleep(1)
GPIO.output(stop_pin, GPIO.LOW)
# 清理GPIO
GPIO.cleanup()
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了单片机控制步进电机的原理、技术和应用。从驱动原理到实践应用,从系统设计到优化策略,从算法解析到故障诊断,全面解析了单片机步进电机控制的方方面面。专栏还提供了丰富的案例、指南和秘诀,帮助读者掌握核心技术,提升系统性能和效率,解决常见问题,实现高效运行和稳定性。此外,专栏还涵盖了系统安全设计、成本优化、维护保养、选型指南、测试验证、仿真建模、云连接、人工智能和物联网应用等方面,为读者提供了全面的知识和实践指导。通过阅读本专栏,读者可以轻松掌握单片机步进电机控制的原理和技巧,在工业自动化、医疗设备等领域拓展应用。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
p值在机器学习中的角色:理论与实践的结合

# 1. p值在统计假设检验中的作用
## 1.1 统计假设检验简介
统计假设检验是数据分析中的核心概念之一,旨在通过观察数据来评估关于总体参数的假设是否成立。在假设检验中,p值扮演着决定性的角色。p值是指在原
大样本理论在假设检验中的应用:中心极限定理的力量与实践
# 1. 中心极限定理的理论基础
## 1.1 概率论的开篇
概率论是数学的一个分支,它研究随机事件及其发生的可能性。中心极限定理是概率论中最重要的定理之一,它描述了在一定条件下,大量独立随机变量之和(或平均值)的分布趋向于正态分布的性
【置信区间计算秘籍】:统计分析必备技能指南
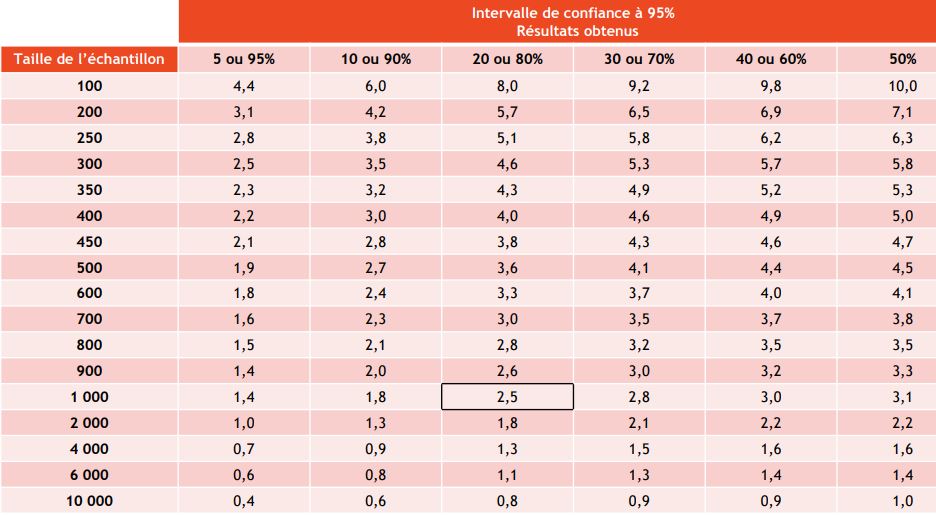
# 1. 置信区间的统计学基础
## 1.1 统计学中的置信概念
在统计学中,"置信区间"是一个重要的概念,用于表达对总体参数(如均值、比例等)的估计。简单来说,如果从同一总体中重复抽样很多次,并为每个样本构建一个区间估计,那么这些区间中有一定比例(如95%)会包含真实的总体参数。这个区间,就被称为置信区间。
## 1.2 置信区间的目的和意义
置信区间的目的是为了给出
正态分布与信号处理:噪声模型的正态分布应用解析
# 1. 正态分布的基础理论
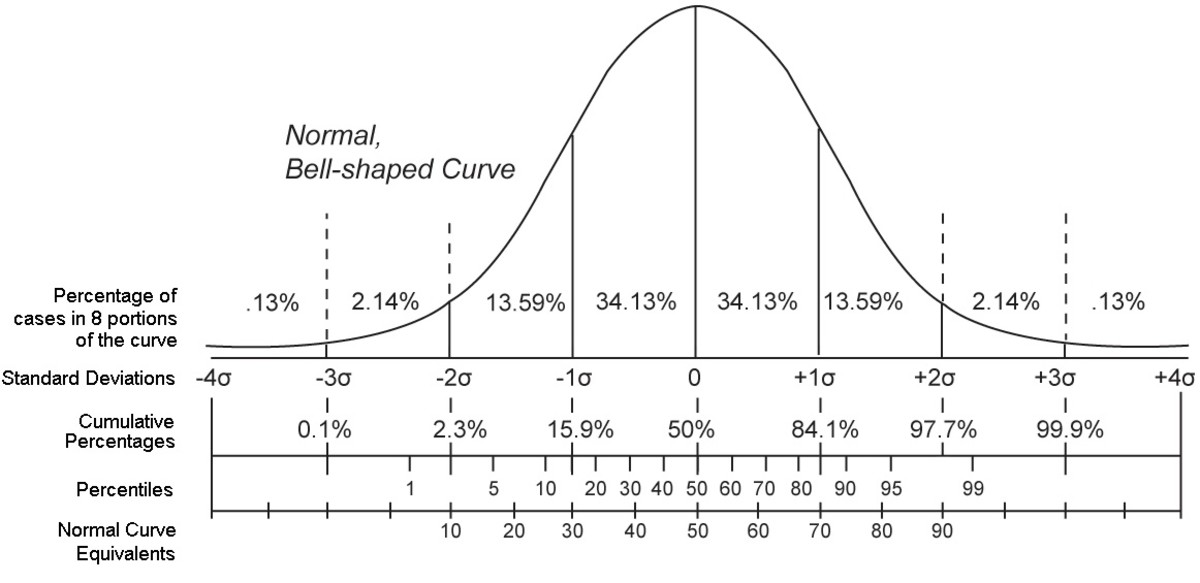
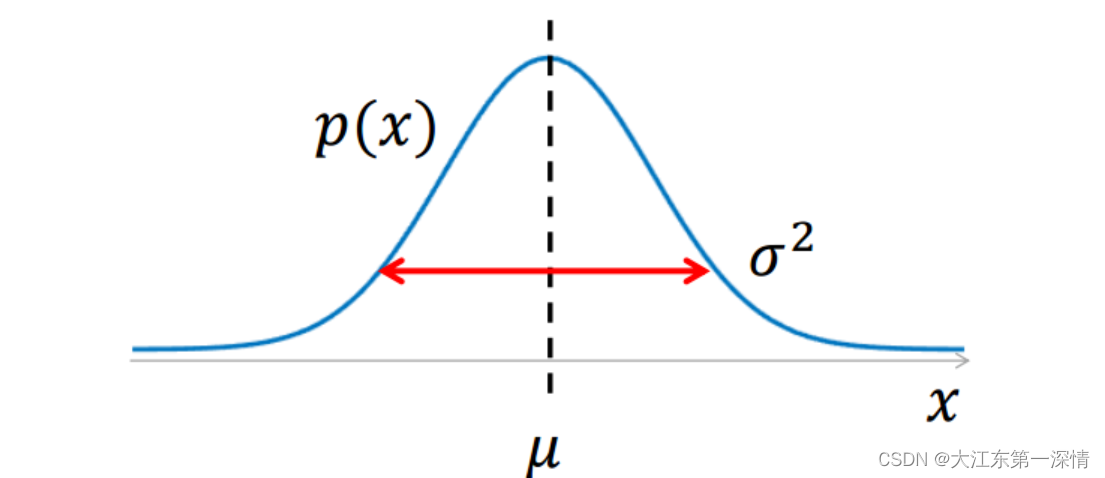
正态分布,又称为高斯分布,是一种在自然界和社会科学中广泛存在的统计分布。其因数学表达形式简洁且具有重要的统计意义而广受关注。本章节我们将从以下几个方面对正态分布的基础理论进行探讨。
## 正态分布的数学定义
正态分布可以用参数均值(μ)和标准差(σ)完全描述,其概率密度函数(PDF)表达式为:
```math
f(x|\mu,\sigma^2) = \frac{1}{\sqrt{2\pi\sigma^2}} e
【品牌化的可视化效果】:Seaborn样式管理的艺术

# 1. Seaborn概述与数据可视化基础
## 1.1 Seaborn的诞生与重要性
Seaborn是一个基于Python的统计绘图库,它提供了一个高级接口来绘制吸引人的和信息丰富的统计图形。与Matplotlib等绘图库相比,Seaborn在很多方面提供了更为简洁的API,尤其是在绘制具有多个变量的图表时,通过引入额外的主题和调色板功能,大大简化了绘图的过程。Seaborn在数据科学领域得
NumPy在金融数据分析中的应用:风险模型与预测技术的6大秘籍

# 1. NumPy基础与金融数据处理
金融数据处理是金融分析的核心,而NumPy作为一个强大的科学计算库,在金融数据处理中扮演着不可或缺的角色。本章首先介绍NumPy的基础知识,然后探讨其在金融数据处理中的应用。
## 1.1 NumPy基础
NumPy(N
【线性回归时间序列预测】:掌握步骤与技巧,预测未来不是梦
# 1. 线性回归时间序列预测概述
## 1.1 预测方法简介
线性回归作为统计学中的一种基础而强大的工具,被广泛应用于时间序列预测。它通过分析变量之间的关系来预测未来的数据点。时间序列预测是指利用历史时间点上的数据来预测未来某个时间点上的数据。
## 1.2 时间序列预测的重要性
在金融分析、库存管理、经济预测等领域,时间序列预测的准确性对于制定战略和决策具有重要意义。线性回归方法因其简单性和解释性,成为这一领域中一个不可或缺的工具。
## 1.3 线性回归模型的适用场景
尽管线性回归在处理非线性关系时存在局限,但在许多情况下,线性模型可以提供足够的准确度,并且计算效率高。本章将介绍线
Pandas数据转换:重塑、融合与数据转换技巧秘籍
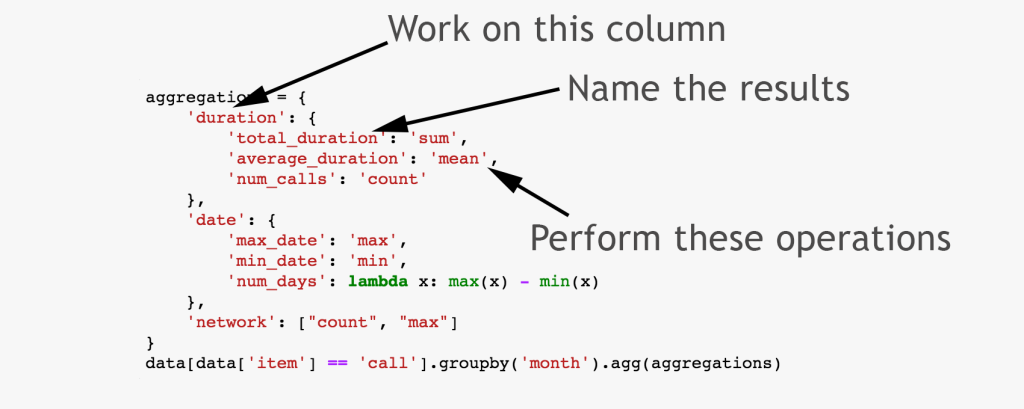
# 1. Pandas数据转换基础
在这一章节中,我们将介绍Pandas库中数据转换的基础知识,为读者搭建理解后续章节内容的基础。首先,我们将快速回顾Pandas库的重要性以及它在数据分析中的核心地位。接下来,我们将探讨数据转换的基本概念,包括数据的筛选、清洗、聚合等操作。然后,逐步深入到不同数据转换场景,对每种操作的实际意义进行详细解读,以及它们如何影响数
从Python脚本到交互式图表:Matplotlib的应用案例,让数据生动起来

# 1. Matplotlib的安装与基础配置
在这一章中,我们将首先讨论如何安装Matplotlib,这是一个广泛使用的Python绘图库,它是数据可视化项目中的一个核心工具。我们将介绍适用于各种操作系统的安装方法,并确保读者可以无痛地开始使用Matplotlib
数据清洗的概率分布理解:数据背后的分布特性

# 1. 数据清洗的概述和重要性
数据清洗是数据预处理的一个关键环节,它直接关系到数据分析和挖掘的准确性和有效性。在大数据时代,数据清洗的地位尤为重要,因为数据量巨大且复杂性高,清洗过程的优劣可以显著影响最终结果的质量。
## 1.1 数据清洗的目的
数据清洗
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )