单片机控制电动机:步进电机与伺服电机的区别与应用:揭秘两种电机的特性与应用场景
发布时间: 2024-07-12 06:57:07 阅读量: 84 订阅数: 31 
# 1. 电动机概述
电动机是一种将电能转化为机械能的装置,广泛应用于工业、医疗、航空航天等领域。电动机按工作原理可分为步进电机和伺服电机。步进电机以固定的角度步进旋转,而伺服电机则可以精确地控制转速和位置。
电动机的性能指标包括精度、响应速度、扭矩和转速。精度和响应速度是衡量电动机控制精度的指标,扭矩和转速则反映了电动机的动力输出能力。在选择电动机时,需要根据应用场景和要求综合考虑这些性能指标。
# 2. 步进电机与伺服电机的工作原理
### 2.1 步进电机的工作原理
#### 2.1.1 步进电机的结构
步进电机是一种将电脉冲信号转换成机械角位移的电机。其结构主要由定子、转子、端盖和轴承组成。
* **定子:**由铁芯和线圈组成,形成一个多极磁场。
* **转子:**由永磁材料制成,具有多个齿槽。
* **端盖:**用于固定定子和转子,并提供轴承安装位置。
* **轴承:**支撑转子并允许其旋转。
#### 2.1.2 步进电机的驱动方式
步进电机可以通过不同的驱动方式进行控制,常见的有:
* **全步驱动:**每个脉冲驱动电机转动一个步距角。
* **半步驱动:**每个脉冲驱动电机转动半个步距角,精度更高。
* **微步驱动:**将脉冲进一步细分,实现更小的步距角,精度最高。
### 2.2 伺服电机的的工作原理
#### 2.2.1 伺服电机的结构
伺服电机是一种由控制系统、电机和反馈装置组成的闭环控制系统。其结构主要由以下部分组成:
* **电机:**通常为直流无刷电机或交流感应电机。
* **编码器:**用于检测电机的转速和位置。
* **控制器:**接收控制信号,根据编码器反馈进行控制。
* **驱动器:**为电机提供功率。
#### 2.2.2 伺服电机的驱动方式
伺服电机可以通过不同的驱动方式进行控制,常见的有:
* **位置控制:**控制电机转动到指定位置。
* **速度控制:**控制电机转动速度。
* **力矩控制:**控制电机输出力矩。
**代码块:**
```python
# 伺服电机位置控制示例
import RPi.GPIO as GPIO
# 设置引脚
GPIO.setmode(GPIO.BCM)
GPIO.setup(18, GPIO.OUT)
# 创建 PWM 对象
pwm = GPIO.PWM(18, 50)
# 设置占空比,控制电机位置
pwm.start(5) # 占空比为 5%,电机转动到 0 度
# 停止电机
pwm.stop()
GPIO.cleanup()
```
**代码逻辑分析:**
* 第 3 行:设置 GPIO 引脚 18 为输出模式。
* 第 4 行:创建 PWM 对象,使用 GPIO 引脚 18,频率为 50Hz。
* 第 6 行:设置 PWM 占空比为 5%,电机转动到 0 度。
* 第 9 行:停止 PWM 输出,释放 GPIO 引脚。
**参数说明:**
* `GPIO.setmode(GPIO.BCM)`:设置 GPIO 引脚编号模式为 BCM。
* `GPIO.setup(18, GPIO.OUT)`:设置 GPIO 引脚 18 为输出模式。
* `GPIO.PWM(18, 50)`:创建 PWM 对象,使用 GPIO 引脚 18,频率为 50Hz。
* `pwm.start(5)`:设置 PWM 占空比为 5%。
* `pwm.stop()`:停止 PWM 输出。
* `GPIO.cleanup()`:释放 GPIO 引脚。
# 3.1 精度与响应速度
#### 3.1.1 步进电机的精度
步进电机是一种离散运动电机,其转动角度是按固定的步长进行的。步进电机的精度取决于步距角和细分驱动技术。步距角是指电机每转动一步的旋转角度,通常以度或步为单位。细分驱动技术是指将电机的一步细分为更小的步长,从而提高电机的精度。
步进电机的步距角通常在1.8°到180°之间,细分驱动技术可以将步距角细分为1/2、1/4、1/8、1/16甚至更小的步长。例如,一个步距角为1.8°的步进电机,采用1/16细分驱动后,其精度可以达到0.1125°。
#### 3.1.2 伺服电机的精度
伺服电机是一种连续运动电机,其转动角度可以连续变化。伺服电机的精度取决于编码器分辨率和控制器的精度。编码器分辨率是指编码器每转动一圈所能检测到的脉冲数,控制器的精度是指控制器对编码器脉冲的处理能力。
伺服电机的编码器分辨率通常在1000ppr到20000ppr之间,控制器的精度通常在0.001°到0.0001°之间。例如,一个编码器分辨率为1000ppr、控制器精度为0.001°的伺服电机,其精度可以达到0.001°。
#### 3.1.3 步进电机与伺服电机响应速度对比
步进电机和伺服电机的响应速度取决于电机的惯量、阻尼和控制算法。惯量是指电机转动部件的质量,阻尼是指电机转动时产生的阻力,控制算法是指电机控制器的算法。
步进电机通常具有较大的惯量和阻尼,因此响应速度较慢。伺服电机通常具有较小的惯量和阻尼,因此响应速度较快。
下表对比了步进电机和伺服电机的精度和响应速度:
| 特性 | 步进电机 | 伺服电机 |
|---|---|---|
| 精度 | 0.1125°(1/16细分) | 0.001° |
| 响应速度 | 慢 | 快 |
### 3.2 扭矩与转速
#### 3.2.1 步进电机的扭矩
步进电机的扭矩取决于电机尺寸、相数、电流和细分驱动技术。电机尺寸越大,相数越多,电流越大,细分驱动技术越先进,电机的扭矩就越大。
步进电机的扭矩通常在0.1Nm到100Nm之间。例如,一个尺寸为NEMA 23、相数为3、电流为2A、采用1/16细分驱动技术的步进电机,其扭矩可以达到1.2Nm。
#### 3.2.2 伺服电机的扭矩
伺服电机的扭矩取决于电机尺寸、绕组方式、电流和控制算法。电机尺寸越大,绕组方式越复杂,电流越大,控制算法越先进,电机的扭矩就越大。
伺服电机的扭矩通常在0.1Nm到1000Nm之间。例如,一个尺寸为NEMA 23、绕组方式为Y型、电流为2A、采用PID控制算法的伺服电机,其扭矩可以达到1.5Nm。
#### 3.2.3 步进电机与伺服电机转速对比
步进电机和伺服电机的转速取决于电机的极对数、电源频率和控制算法。极对数是指电机转子上的磁极对数,电源频率是指电机电源的频率,控制算法是指电机控制器的算法。
步进电机通常具有较小的极对数和较高的电源频率,因此转速较快。伺服电机通常具有较大的极对数和较低的电源频率,因此转速较慢。
下表对比了步进电机和伺服电机的扭矩和转速:
| 特性 | 步进电机 | 伺服电机 |
|---|---|---|
| 扭矩 | 0.1Nm-100Nm | 0.1Nm-1000Nm |
| 转速 | 快 | 慢 |
# 4. 步进电机与伺服电机的应用场景
### 4.1 步进电机的应用场景
步进电机具有结构简单、成本低廉、控制方便等优点,在许多领域都有广泛的应用,常见应用场景包括:
- **3D打印机:**步进电机用于控制打印机的移动平台,实现精确的定位和运动。
- **数控机床:**步进电机用于控制机床的进给轴,实现精确的进给运动和加工。
- **医疗器械:**步进电机用于控制医疗器械的运动,如手术机器人、显微镜和透析机。
### 4.2 伺服电机的应用场景
伺服电机具有精度高、响应速度快、扭矩大等优点,在工业自动化领域得到了广泛的应用,常见应用场景包括:
- **工业机器人:**伺服电机用于控制机器人的关节运动,实现精确的定位和运动控制。
- **数控机床:**伺服电机用于控制机床的主轴和进给轴,实现高精度的加工和控制。
- **航空航天:**伺服电机用于控制飞机和航天器的控制系统,实现精确的姿态控制和运动控制。
### 4.3 步进电机与伺服电机应用场景对比
步进电机和伺服电机在应用场景上存在重叠,但各有侧重。步进电机更适合于低精度、低扭矩、低响应速度的应用场景,而伺服电机更适合于高精度、高扭矩、高响应速度的应用场景。
下表对步进电机和伺服电机在不同应用场景的优缺点进行了对比:
| 应用场景 | 步进电机 | 伺服电机 |
|---|---|---|
| 3D打印机 | 低成本、控制方便 | 精度高、响应速度快 |
| 数控机床 | 进给轴控制 | 主轴和进给轴控制 |
| 医疗器械 | 手术机器人、显微镜 | 透析机、手术机器人 |
| 工业机器人 | 关节运动控制 | 关节运动控制 |
| 航空航天 | 控制系统 | 控制系统 |
### 4.4 应用场景选择指南
在选择步进电机还是伺服电机时,需要考虑以下因素:
- **精度要求:**如果需要高精度,则应选择伺服电机。
- **响应速度要求:**如果需要快速响应,则应选择伺服电机。
- **扭矩要求:**如果需要大扭矩,则应选择伺服电机。
- **成本要求:**如果成本是主要考虑因素,则步进电机可能是更好的选择。
通过综合考虑这些因素,可以做出适合特定应用场景的电机选择。
# 5. 单片机控制步进电机与伺服电机
### 5.1 单片机控制步进电机
#### 5.1.1 单片机驱动步进电机
单片机驱动步进电机可以通过以下步骤实现:
1. **初始化单片机IO口:**配置IO口为输出模式,用于控制步进电机驱动器。
2. **配置步进电机驱动器:**根据步进电机类型和驱动器规格,设置驱动器的工作模式、细分率等参数。
3. **编写控制程序:**根据步进电机控制算法,编写控制程序,控制单片机IO口输出脉冲信号,驱动步进电机按预期方向和速度运行。
#### 5.1.2 步进电机控制算法
常见的步进电机控制算法包括:
- **全步进控制:**每次脉冲驱动步进电机转动一个步距角。
- **半步进控制:**每次脉冲驱动步进电机转动半个步距角,精度更高。
- **微步进控制:**通过细分脉冲,进一步提高步进电机的精度。
### 5.2 单片机控制伺服电机
#### 5.2.1 单片机驱动伺服电机
单片机驱动伺服电机可以通过以下步骤实现:
1. **初始化单片机IO口:**配置IO口为输出模式,用于控制伺服电机驱动器。
2. **配置伺服电机驱动器:**根据伺服电机类型和驱动器规格,设置驱动器的工作模式、反馈信号类型等参数。
3. **编写控制程序:**根据伺服电机控制算法,编写控制程序,控制单片机IO口输出PWM信号,驱动伺服电机按预期角度和速度运行。
#### 5.2.2 伺服电机控制算法
常见的伺服电机控制算法包括:
- **PID控制:**通过比例、积分、微分环节,调节伺服电机输出扭矩,实现精确的位置控制。
- **位置环控制:**通过位置传感器反馈,实时调整伺服电机位置,提高控制精度。
- **速度环控制:**通过速度传感器反馈,实时调整伺服电机速度,实现平稳运行。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0

专栏简介
该专栏深入探讨了单片机控制电动机的原理、实现和应用。从入门到精通,它全面涵盖了电动机控制的各个方面,包括步进电机和伺服电机的区别、PID控制算法、PWM调速、编码器的作用、电机驱动电路设计、系统调试和故障排除、优化技巧、常见问题和解决方案、选型指南、维护和保养。此外,该专栏还探讨了电机控制系统在工业自动化、机器人、智能家居、医疗设备、汽车电子、航空航天和可再生能源等领域的应用,展示了其在现代技术中的广泛影响。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
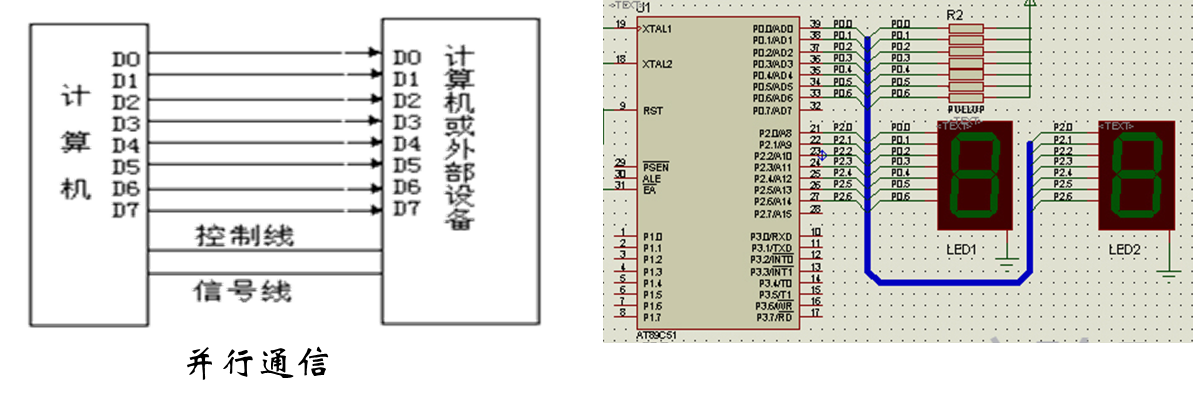
数据链路层深度剖析:帧、错误检测与校正机制,一次学懂

# 摘要
数据链路层是计算机网络架构中的关键组成部分,负责在相邻节点间可靠地传输数据。本文首先概述了数据链路层的基本概念和帧结构,包括帧的定义、类型和封装过程。随后,文章详细探讨了数据链路层的错误检测机制,包括检错原理、循环冗余检验(CRC)、奇偶校验和校验和,以及它们在错误检测中的具体应用。接着,本文介绍了数据链路层的错误校正技术,如自动重传请求(ARQ
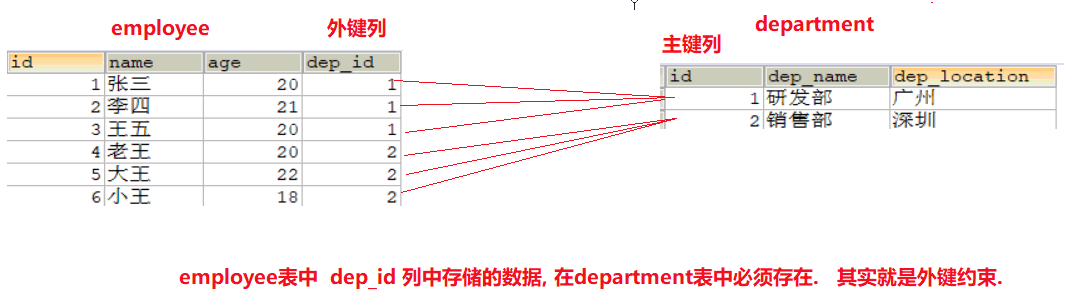
【数据完整性管理】:重庆邮电大学实验报告中的关键约束技巧
# 摘要
数据完整性是数据库管理系统中至关重要的概念,它确保数据的质量和一致性。本文首先介绍了数据完整性的概念、分类以及数据库约束的基本原理和类型。随后,文章深入探讨了数据完整性约束在实践中的具体应用,包括主键和外键约束的设置、域约束的管理和高级技巧如触发器和存储过程的运用。接着,本文分析了约束带来的性能影响,并提出了约束优化与维护的策略。最后,文章通过案例分析,对数据完整性管理进行了深度探讨,总结了实际操作中的
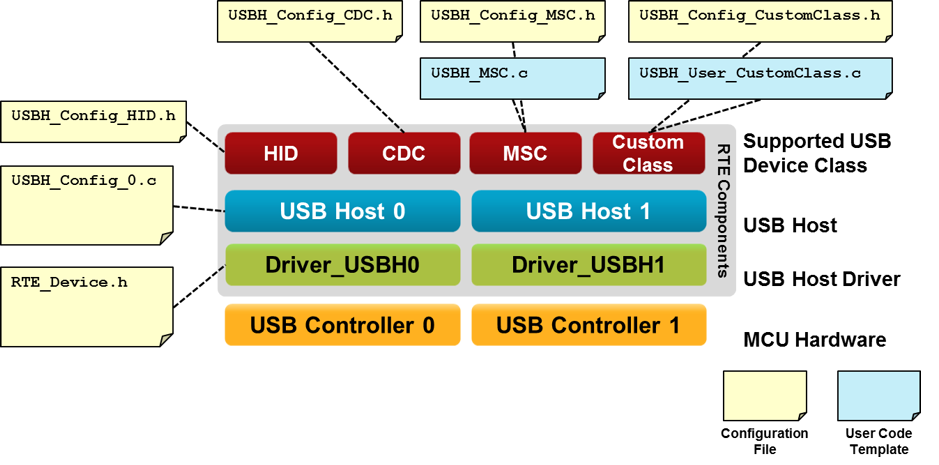
深入解析USB协议:VC++开发者必备的8个关键点
# 摘要
本文系统地介绍了USB协议的基础知识、硬件基础、数据传输机制、在VC++中的实现以及高级特性与编程技巧。首先概述USB协议的基础,然后详细探讨了USB硬件的物理接口、连接规范、电源管理和数据传输的机制。文章接着阐述了在VC++环境下USB驱动程序的开发和与USB设备通信的编程接口。此外,还涉及了USB设备的热插拔与枚举过程、性能优化,以及USB协议高级特性和编程技巧。最后,本文提供了USB设备的调试工具和方法,以
【科东纵密性能调优手册】:监控系统到极致优化的秘笈

# 摘要
性能调优是提高软件系统效率和响应速度的关键环节。本文首先介绍了性能调优的目的与意义,概述了其基本原则。随后,深入探讨了系统性能评估的方法论,包括基准测试、响应时间与吞吐量分析,以及性能监控工具的使用和系统资源的监控。在硬件优化策略方面,详细分析了CPU、内存和存储的优化方法。软件与服务优化章节涵盖了数据库、应用程序和网络性能调
【FPGA引脚规划】:ug475_7Series_Pkg_Pinout.pdf中的引脚分配最佳实践

# 摘要
本文全面探讨了FPGA引脚规划的关键理论与实践方法,旨在为工程师提供高效且可靠的引脚配置策略。首先介绍了FPGA引脚的基本物理特性及其对设计的影响,接着分析了设计时需考虑的关键因素,如信号完整性、热管理和功率分布。文章还详细解读了ug475_7S
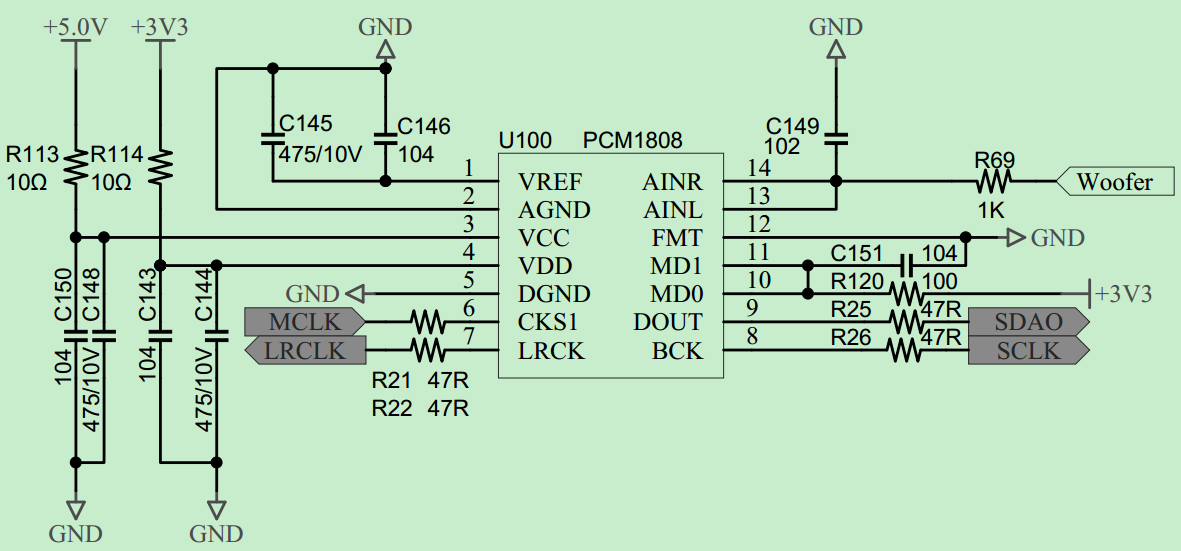
BY8301-16P语音模块全面剖析:从硬件设计到应用场景的深度解读
# 摘要
本文详细介绍了BY8301-16P语音模块的技术细节、硬件设计、软件架构及其应用场景。首先概述了该模块的基本功能和特点,然后深入解析其硬件设计,包括主控芯片、音频处理单元、硬件接口和电路设计的优化。接着,本文探讨了软件架构、编程接口以及高级编程技术,为开发者提供了编程环境搭建和
【Ansys命令流深度剖析】:从脚本到高级应用的无缝进阶
# 摘要
本文深入探讨了Ansys命令流的基础知识、结构和语法、实践应用、高级技巧以及案例分析与拓展应用。首先,介绍了Ansys命令流的基本构成,包括命令、参数、操作符和分隔符的使用。接着,分析了命令流的参数化、数组操作、嵌套命令流和循环控制,强调了它们在提高命令流灵活性和效率方面的作用。第三章探讨了命令流在材料属性定义、网格划分和结果后处理中的应用,展示了其在提高仿真精度和效率上的实际价值。第四章介绍了命令流的高级技巧,包括宏定义、用户自定义函数、错误处理与调试以及并行处理与性能优化。最后,第五章通过案例分析和扩展应用,展示了命令流在复杂结构模拟和多物理场耦合中的强大功能,并展望了其未来趋势
【Ubuntu USB转串口驱动安装】:新手到专家的10个实用技巧

# 摘要
本文详细介绍了在Ubuntu系统下安装和使用USB转串口驱动的方法。从基础介绍到高级应用,本文系统地探讨了USB转串口设备的种类、Ubuntu系统的兼容性检查、驱动的安装步骤及其验证、故障排查、性能优化、以及在嵌入式开发和远程管理中的实际应用场景。通过本指南,用户可以掌握USB转串口驱动的安装与管理,确保与各种USB转串口设备的顺畅连接和高效使用。同时,本文还提
RH850_U2A CAN Gateway高级应用速成:多协议转换与兼容性轻松掌握

# 摘要
本文全面概述了RH850_U2A CAN Gateway的技术特点,重点分析了其多协议转换功能的基础原理及其在实际操作中的应用。通过详细介绍协议转换机制、数据封装与解析技术,文章展示了如何在不同通信协议间高效转换数据包。同时,本文还探讨了RH850_U2A CAN Gateway在实际操作过程中的设备初始化、协议转换功能实现以及兼容性测试等关键环节。此外,文章还介
【FPGA温度监测:Xilinx XADC实际应用案例】

# 摘要
本文探讨了FPGA在温度监测中的应用,特别是Xilinx XADC(Xilinx Analog-to-Digital Converter)的核心
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )