PyTorch模型集成速成课:10个实用技巧助你秒变深度学习大师
发布时间: 2024-12-12 10:53:44 阅读量: 12 订阅数: 12 

PyTorch深度学习入门手册:PyTorch深度学习常用函数库解析及其应用指南
# 1. PyTorch模型集成概述
在深度学习和人工智能领域,模型集成(Model Ensembling)是一种常见而强大的技术,旨在通过组合多个模型的预测来提升整体性能。PyTorch作为一个广泛使用的深度学习框架,为实现模型集成提供了灵活的支持。集成模型不仅可以提高预测的准确性,还能增强模型在面对新数据时的鲁棒性。本章将简要介绍模型集成的概念,并概述其在PyTorch中的应用前景。
## 1.1 模型集成的重要性
模型集成的核心思想是利用多个学习器的预测结果来提升最终的预测性能。这种思想的根源在于“多个脑袋比一个脑袋好用”的智慧,可以简单地理解为“众人拾柴火焰高”。在实践中,单个模型可能由于过拟合、欠拟合或是对特定数据模式的识别能力不足而表现不佳。相比之下,集成模型能够通过组合不同的模型或同一个模型的不同实例,减少这些缺陷带来的影响,从而获得更加稳定和准确的预测结果。
## 1.2 PyTorch模型集成的可行性
PyTorch以其动态计算图、易用性和灵活性而受到众多开发者的青睐。这些特点使得在PyTorch中构建和训练集成模型成为可能,并且相对容易。PyTorch不仅支持了包括卷积神经网络(CNNs)、循环神经网络(RNNs)等在内的各种神经网络架构,还允许开发者利用其丰富的API来实现复杂的模型集成策略。此外,通过集成学习,PyTorch用户能够进一步提升模型在各类任务中的性能,如图像识别、语音识别、自然语言处理等,从而在工业界和学术界都占据了一席之地。
# 2. 模型集成的理论基础
模型集成是机器学习领域的一项核心技术,它的目标是通过组合多个学习器的预测来获得比单一学习器更好的预测性能。集成学习不仅可以提高模型的准确率,还可以通过多样化的模型减少过拟合,增强模型在未知数据上的泛化能力。
## 2.1 模型集成的定义和原理
### 2.1.1 集成学习的理论框架
集成学习的理论框架基于“群体智慧”,即多个模型的预测结果汇总起来,可以有效地提高预测的准确性和鲁棒性。这一理论框架背后的核心思想是:如果多个模型各自掌握了一些独立于其他模型的信息,则这些模型结合起来可能会比任何一个单独的模型都要强。在实际应用中,有多种方法可以实现这种模型的结合,包括但不限于投票法、平均法、堆叠法等。
### 2.1.2 模型集成的类型和应用
模型集成可以大致分为两大类:同质集成和异质集成。同质集成指的是集成中的所有学习器都是同一类型,比如都是决策树;异质集成则包含不同类型的模型,如决策树、神经网络和SVM等。根据集成方法的不同,模型集成在不同的应用场景下有着广泛的应用,包括但不限于分类、回归、聚类等。
## 2.2 模型集成的关键技术
### 2.2.1 Bagging与Boosting方法
Bagging(Bootstrap Aggregating)和Boosting是两种主要的集成学习方法。Bagging侧重于减少模型方差,通过对训练数据进行有放回抽样来生成多个独立的子集,并在每个子集上训练一个基学习器,最后通过投票或平均法来合并它们的预测结果。而Boosting则侧重于减少模型偏差,它顺序地训练一系列基学习器,每个学习器都试图纠正前一个学习器的错误。
### 2.2.2 栈式泛化(Stacking)技术
Stacking(Stacked Generalization)技术是一种集成学习方法,它通过训练多个不同的基学习器,然后用这些学习器的预测结果作为输入来训练一个次级学习器。这样,次级学习器的任务是学会整合不同基学习器的预测,以获得比任何一个基学习器都要好的性能。
## 2.3 模型集成的性能评估
### 2.3.1 交叉验证和重采样技术
评估模型集成的性能需要有效地估计模型在未知数据上的表现。交叉验证是一种常用的评估技术,特别是当数据量较少时,通过将数据分成K个部分,轮流将其中一部分作为测试集,其余作为训练集,来综合评估模型的性能。重采样技术包括了自助采样(Bootstrapping)等方法,可以帮助我们得到更加鲁棒的模型评估结果。
### 2.3.2 评价指标与比较方法
在比较不同模型集成的性能时,我们通常会使用一些评价指标,如准确率、召回率、F1分数、ROC曲线和AUC值等。此外,还有如偏差-方差分解等更深层次的分析方法,可以帮助我们理解集成方法相对于单一模型的优势所在。
以上内容为本章节的简要概述,接下来将针对每个理论方法和技术点展开详细介绍和分析。
# 3. PyTorch中的模型集成实践
## 3.1 使用PyTorch实现基本集成模型
### 3.1.1 利用PyTorch构建Bagging集成
在本章中,我们将深入探讨如何使用PyTorch框架来实现模型集成。模型集成技术可以通过结合多个模型来提高预测的准确性和鲁棒性。首先,我们将介绍基础的模型集成技术——Bagging(Bootstrap Aggregating)。
Bagging是一种集成方法,它通过并行地训练多个模型,并且在每个模型的训练过程中使用不同的训练子集,来降低方差,从而增强模型的泛化能力。在PyTorch中,我们可以用`torch.utils.data`模块中的`DataLoader`来实现数据的采样。
以下是利用PyTorch构建Bagging集成的一个基本示例:
```python
import torch
from torch import nn
from torch.utils.data import DataLoader, Subset
from torchvision import datasets, transforms
# 定义数据集和数据加载器
transform = transforms.Compose([transforms.ToTensor(),
transforms.Normalize((0.5,), (0.5,))])
trainset = datasets.MNIST('~/.pytorch/MNIST_data/', download=True, train=True, transform=transform)
indices = list(range(len(trainset)))
bags = []
for i in range(5): # 创建5个不同的bagging模型
np.random.shuffle(indices)
train_sampler = SubsetRandomSampler(indices[:int(0.8 * len(trainset))])
train_loader = DataLoader(trainset, batch_size=64, sampler=train_loader)
# 构建模型结构
model = nn.Sequential(
nn.Linear(784, 128),
nn.ReLU(),
nn.Linear(128, 64),
nn.ReLU(),
nn.Linear(64, 10),
)
# 定义损失函数和优化器
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters())
# 训练模型
num_epochs = 5
for epoch in range(num_epochs):
running_loss = 0.0
for images, labels in train_loader:
# 前向传播
outputs = model(images.view(images.shape[0], -1))
loss = criterion(outputs, labels)
running_loss += loss.item()
# 反向传播和优化
optimizer.zero_grad()
loss.backward()
optimizer.step()
print(f'Epoch {epoch+1}/{num_epochs}.. '
f'Training loss: {running_loss/len(train_loader):.3f}')
bags.append(model)
```
在此代码块中,我们首先创建了一个包含5个独立模型的列表`bags`,这5个模型将会作为Bagging集成中的基学习器。使用`SubsetRandomSampler`在每个基学习器训练过程中随机选择80%的数据,这样每个模型都只使用整个数据集的一部分进行训练。
代码中对模型的训练采用了简单的前馈神经网络结构,但Bagging的原理同样适用于更复杂的模型结构。每一个基学习器独立完成前向传播和反向传播,最终我们得到一个由多个模型组成的集成。
### 3.1.2 利用PyTorch实现Boosting集成
Boosting是一种不同的集成技术,它通过顺序地训练模型来专注于前一个模型预测错误的样本。Boosting方法中的每一个基学习器都有机会调整其自身权重,以便在下一个模型中得到更多的关注。
一种流行的Boosting方法是AdaBoost(Adaptive Boosting),它将重点关注训练过程中经常被错误分类的样例。在PyTorch中,我们可以手动实现AdaBoost集成,或者使用现成的库如`scikit-learn`。
下面的示例展示了如何实现一个简化版的AdaBoost集成:
```python
import numpy as np
from sklearn.tree import DecisionTreeClassifier
class SimpleAdaBoost:
def __init__(self, n_models=5):
self.n_models = n_models
self.models = []
self.alphas = []
def fit(self, X, y):
# 初始化权重
w = np.array([1.0/len(y)] * len(y))
for _ in range(self.n_models):
model = DecisionTreeClassifier(max_depth=1)
model.fit(X, y, sample_weight=w)
# 预测概率
preds = model.predict_proba(X)[:, 1]
preds = np.clip(preds, 1e-15, 1 - 1e-15)
err = np.sum(w * (y != (preds > 0.5).astype(int)))
# 计算alpha
alpha = 0.5 * np.log((1 - err) / (err + 1e-15))
self.alphas.append(alpha)
# 更新权重
w *= np.exp(-alpha * y * preds)
w /= np.sum(w)
self.models.append(model)
def predict(self, X):
y_pred = np.zeros(len(X))
for alpha, model in zip(self.alphas, self.models):
preds = model.predict_proba(X)[:, 1]
y_pred += alpha * preds
return np.sign(y_pred)
```
在此类`SimpleAdaBoost`中,我们创建了一个决策树作为基学习器,使用了`sklearn.tree.DecisionTreeClassifier`。实际项目中,可以使用更复杂的模型如深度学习网络。该类通过训练迭代地调整数据权重,增强了模型对前一个模型预测错误样本的关注。预测时,每个模型的预测结果被加权平均,权重是由AdaBoost算法计算得到的。
通过以上两个小节的示例,我们能够理解如何在PyTorch中实现两种基本的模型集成技术:Bagging和Boosting。这些方法在机器学习实践中是非常有效的工具,尤其是在处理具有高方差或偏差的问题时。接下来,我们将讨论一些更高级的模型集成技术应用。
# 4. PyTorch模型集成进阶技巧
随着深度学习技术的不断演进,模型集成不再局限于简单的堆叠模型,而是向着更加精细化、智能化的方向发展。在这一章节中,我们将探讨模型集成中的进阶技巧,包括正则化和剪枝策略、处理不平衡数据集的方法、以及自动化和智能化的集成学习框架。
## 4.1 集成学习的正则化和剪枝
### 4.1.1 集成模型的正则化策略
正则化技术是避免过拟合的有效手段之一,它通过添加约束或惩罚项来控制模型复杂度。在集成学习中,正则化不仅仅作用于单个模型,还可以通过结合多个模型的预测结果来实现。例如,集成模型可以对不同模型的输出进行平均或加权,以此来平滑最终的预测结果,并降低泛化误差。
在PyTorch中,实现集成模型的正则化通常需要对不同模型的预测输出施加一定的约束。例如,可以对每个子模型的输出应用L1或L2正则化,或者在模型集成过程中引入熵正则化来增加集成的鲁棒性。
### 4.1.2 剪枝技巧及其对集成性能的影响
剪枝是另一种用于提高模型泛化能力的技术,它通过移除冗余或不重要的特征或模型来简化模型结构。在集成学习中,剪枝不仅可以减少模型的复杂度,还可以减少计算资源的需求。
在使用PyTorch进行模型剪枝时,可以通过设置阈值来消除那些权重较小的神经元或连接。在集成学习的上下文中,可以对每个子模型进行独立剪枝,然后选择剪枝后效果最佳的模型作为集成的一部分。使用交叉验证技术可以评估剪枝对模型泛化性能的影响。
## 4.2 处理不平衡数据集的集成方法
### 4.2.1 针对不平衡数据的集成策略
不平衡数据集是指分类问题中各类别的样本数量不均匀。这种情况下,简单的模型集成可能会导致分类性能下降,因为集成可能会偏向于多数类。为了解决这个问题,需要采用特定的集成策略来提高对少数类的识别能力。
在PyTorch中,可以通过调整数据加载器来为每个类别生成不同数量的样本,或者使用重采样技术来平衡数据集。此外,可以结合集成模型的不同子集,使用不同的子集为不同的类别赋予不同的权重,以此来提升整体的分类性能。
### 4.2.2 评价指标和模型选择
在不平衡数据集上,传统的评价指标(如准确率)可能不再适用,因此需要引入其他更适合的指标,如F1分数、ROC-AUC或精确率-召回率曲线。在进行模型选择时,这些指标能够更准确地反映出模型对少数类的识别能力。
在PyTorch中,可以通过创建自定义的损失函数或评估函数来考虑这些指标。在模型集成中,可以根据这些指标来权衡不同子模型的贡献,选择最佳的集成策略。
## 4.3 模型集成的自动化和智能化
### 4.3.1 自动化集成学习框架
随着机器学习领域的快速发展,自动化集成学习框架应运而生。这些框架能够在不需要人为干预的情况下,自动地进行模型选择、超参数调整和模型集成。在PyTorch中,可以利用AutoML工具如`optuna`、`ray.tune`等进行自动化的模型搜索和集成。
在自动化集成学习中,流程被高度抽象化,例如,可以定义一个集成学习的搜索空间,框架将自动遍历该空间,寻找最优的集成策略。这个过程中,模型的性能会通过一系列的评价指标来进行评估,最终得到一个性能最优的集成模型。
### 4.3.2 智能化超参数搜索技术
在模型集成中,超参数的选择对最终模型的性能有着重大影响。智能化的超参数搜索技术可以利用历史信息和模型预测来指导搜索过程,提高搜索效率和模型性能。
在PyTorch中,可以采用贝叶斯优化方法来进行超参数搜索。贝叶斯优化通过建立一个代理模型来近似目标函数,并根据代理模型的预测来确定下一次搜索的位置,这种方法在处理高维参数空间时尤其有效。
为了更好地展示这些技术的应用,让我们通过一些具体的代码示例来加深理解。下面的代码块展示了如何使用`optuna`框架来进行自动化的超参数搜索。
```python
import torch
import optuna
from optuna.integration import PyTorchLightningPruningCallback
def objective(trial):
# 定义模型结构和超参数
model = ...
lr = trial.suggest_loguniform('lr', 1e-5, 1e-1)
batch_size = trial.suggest_categorical('batch_size', [32, 64, 128])
# 其他超参数...
# 初始化数据加载器、优化器和损失函数
train_loader = ...
optimizer = torch.optim.Adam(model.parameters(), lr=lr)
criterion = torch.nn.CrossEntropyLoss()
for epoch in range(100):
# 训练过程
model.train()
for batch_idx, (data, target) in enumerate(train_loader):
optimizer.zero_grad()
output = model(data)
loss = criterion(output, target)
loss.backward()
optimizer.step()
# 验证过程
model.eval()
val_loss = ...
accuracy = ...
# 注册中间结果
trial.report(val_loss, epoch)
if trial.should_prune():
raise optuna.exceptions.TrialPruned()
return val_loss
study = optuna.create_study(direction='minimize')
study.optimize(objective, n_trials=100)
print('Best trial:')
trial = study.best_trial
print('Value: ', trial.value)
print('Params: ')
for key, value in trial.params.items():
print(f' {key}: {value}')
```
以上代码段展示了`optuna`在自动化超参数搜索中的应用,其中`PyTorchLightningPruningCallback`用于早期停止不具前景的训练过程,从而节省计算资源。通过这样的搜索过程,可以有效地找到最佳的模型结构和参数配置。
接下来,我们将深入了解如何将这些进阶技巧应用于PyTorch模型集成,并通过具体的案例分析来展示它们在深度学习中的实际效果。
# 5. PyTorch模型集成的深度应用场景
PyTorch框架不仅仅限于研究和实验性的使用,其强大的灵活性和易用性使之能够深入到各个深度学习的应用场景中。在这一章节中,我们将探索模型集成如何在自然语言处理(NLP)、计算机视觉以及强化学习等深度学习领域中发挥作用。
## 5.1 模型集成在NLP中的应用
NLP作为深度学习的一个主要应用领域,模型集成能够提供更为稳定和精确的预测性能,尤其在文本分类和机器翻译这类任务中,集成学习已经被证明是非常有效的策略。
### 5.1.1 集成学习在文本分类中的使用
文本分类是NLP中的一个基本任务,它广泛应用于垃圾邮件检测、情感分析、主题识别等场景。模型集成在这一领域可以极大地提高分类的准确性和鲁棒性。
**代码实现:**
```python
from sklearn.ensemble import RandomForestClassifier, VotingClassifier
from sklearn.svm import SVC
from sklearn.datasets import fetch_20newsgroups
from sklearn.feature_extraction.text import TfidfVectorizer
from sklearn.pipeline import make_pipeline
# 加载数据集
data = fetch_20newsgroups()
X_train, X_test, y_train, y_test = data['data'], data['target'], data['target_names']
# 构建多个分类器
clf1 = RandomForestClassifier(n_estimators=100)
clf2 = SVC(kernel='linear', probability=True)
clf3 = make_pipeline(TfidfVectorizer(), LogisticRegression(solver='lbfgs'))
# 集成模型
eclf = VotingClassifier(estimators=[('rf', clf1), ('gnb', clf2), ('lr', clf3)], voting='soft')
eclf.fit(X_train, y_train)
# 评估模型
print(eclf.score(X_test, y_test))
```
在上述代码中,我们构建了一个集成分类器`VotingClassifier`,它将随机森林、线性SVM和支持向量机的预测结果通过投票机制结合起来。使用`soft`投票可以得到分类器的预测概率,这对于不确定的样本判断尤为重要。
### 5.1.2 集成学习在机器翻译任务中的实践
机器翻译是一个复杂的过程,通常需要考虑语句的上下文、语法结构以及语言的多样性。集成学习可以通过整合不同的翻译模型来提高翻译质量,尤其是在解决长句子或者难以表达的语言结构时。
**代码实现:**
```python
from transformers import MarianMTModel, MarianTokenizer
# 初始化翻译器
tokenizer_en = MarianTokenizer.from_pretrained('Helsinki-NLP/opus-mt-en-fr')
model_enfr = MarianMTModel.from_pretrained('Helsinki-NLP/opus-mt-en-fr')
# 准备输入文本
en_text = "How do you say this sentence in French?"
input_ids = tokenizer_en.prepare_seq2seq_batch([en_text])
# 生成翻译
translated = model_enfr.generate(**input_ids)
# 解码翻译结果
fr_text = [tokenizer_en.decode(g, skip_special_tokens=True) for g in translated]
print(fr_text)
```
在这个例子中,我们使用了Helsinki-NLP的`opus-mt-en-fr`模型,这是一个基于集成学习训练的模型,它能够处理英法翻译任务。通过使用多个翻译器进行集成,我们可以得到更为流畅和准确的翻译结果。
## 5.2 模型集成在计算机视觉中的应用
计算机视觉领域,如图像识别和视频分析,对于准确度有着极高的要求。模型集成技术可以显著提升这些任务的性能,尤其是在处理复杂场景和高维数据时。
### 5.2.1 集成学习在图像识别中的应用
图像识别任务中,模型需要从数据中学习到区分不同类别的能力。集成学习通常可以提升模型的泛化能力,减少过拟合的风险。
**代码实现:**
```python
import torch
import torchvision.models as models
import torchvision.transforms as transforms
from torchvision.datasets import ImageNet
from torch.utils.data import DataLoader
from torch.nn import DataParallel
# 加载预训练模型
resnet50 = models.resnet50(pretrained=True)
resnet101 = models.resnet101(pretrained=True)
resnet152 = models.resnet152(pretrained=True)
# 定义数据预处理
transform = transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]),
])
# 构建集成模型
ensemble_model = torch.nn.ModuleList([DataParallel(model) for model in [resnet50, resnet101, resnet152]])
ensemble_model = torch.nn.DataParallel(ensemble_model)
# 加载数据集
dataset = ImageNet(root='data/', split='val', transform=transform)
dataloader = DataLoader(dataset, batch_size=64, shuffle=True)
# 模型评估逻辑
# ... (此处省略评估逻辑代码)
```
在上面的代码片段中,我们构建了一个由多个预训练ResNet模型组成的集成模型。通过结合不同深度的ResNet模型,能够提升识别复杂图像的性能。
### 5.2.2 集成学习在视频分析中的应用
视频分析任务涉及序列数据,需要模型具有理解和预测动态场景的能力。模型集成通过组合多个模型的预测来提升识别和分类的准确度。
**代码实现:**
```python
# 伪代码,需用适当的库如 PySlowFast 实现视频分析模型集成
import pyslowfast
# 加载预训练的视频模型
slowfast_model = pyslowfast.models.video_model.Net()
slowfast_model.load_state_dict(torch.load('slowfast预训练模型权重文件'))
i3d_model = pyslowfast.models.video_model.Net()
i3d_model.load_state_dict(torch.load('i3d预训练模型权重文件'))
# 构建集成模型
ensemble_video_model = pyslowfast.models.video_model.EnsembleModel([slowfast_model, i3d_model])
# 视频数据预处理
video_data_transform = pyslowfast.utils.transformers视频数据预处理
# 视频数据加载
video_dataset = pyslowfast.datasets.VideoDataSet('视频数据集路径', transform=video_data_transform)
# 集成模型评估逻辑
# ... (此处省略评估逻辑代码)
```
在该示例中,我们使用了PySlowFast库来处理视频数据。集成模型`EnsembleModel`结合了两个不同的视频分析模型:SlowFast和I3D。这种组合能够提升视频识别的稳定性和准确性。
## 5.3 模型集成在强化学习中的应用
强化学习通常处理的是决策过程,模型需要根据环境反馈调整策略以获得最大的累积奖励。在强化学习中使用集成学习可以提高策略的鲁棒性和适应性。
### 5.3.1 集成学习在游戏AI中的应用
在游戏AI中,模型需要能够学习复杂的游戏规则,并作出最优决策。集成学习可以提升AI在不确定和复杂环境下的表现。
**代码实现:**
```python
from ray.rllib.agents.dqn import DQNTrainer
from ray.rllib.agents.registry import get_trainer_class
# 定义训练器
trainer_class = get_trainer_class("DQN")
config = {
# 配置信息
}
# 实例化训练器
trainer = trainer_class(env="GameEnvironment", config=config)
# 训练模型
for i in range(num_iterations):
result = trainer.train()
print(f"Iteration {i}: {result['episode_reward_mean']}")
# 构建集成策略
ensemble_policies = [trainer.get_policy() for _ in range(num_policies)]
# 集成策略评估逻辑
# ... (此处省略评估逻辑代码)
```
在上述代码中,使用了Ray的RLLib库来训练一个强化学习模型。通过集成多个DQN策略,可以提升游戏AI在应对未知挑战时的灵活性和表现。
### 5.3.2 集成学习在机器人控制中的应用
在机器人控制任务中,集成学习可以帮助机器人更准确地理解和执行复杂的操作命令,从而提高执行任务的效率和准确性。
**代码实现:**
```python
from stable_baselines3 import PPO
# 初始化多个PPO模型
ppo_model1 = PPO('MlpPolicy', 'RobotControl-v0', verbose=0)
ppo_model2 = PPO('MlpPolicy', 'RobotControl-v0', verbose=0)
# ...(此处可以继续初始化更多的模型)
# 构建集成模型
ensemble_model = lambda obs: (ppo_model1.predict(obs)[0] + ppo_model2.predict(obs)[0]) / 2
# 机器人控制环境
env = gym.make('RobotControl-v0')
# 集成模型评估逻辑
# ... (此处省略评估逻辑代码)
```
在这个例子中,我们使用了`stable_baselines3`库中的PPO算法训练了两个模型,并创建了一个集成模型来平均两个策略的预测结果。通过集成多个模型,机器人在执行任务时能够更稳健地应对各种状态变化。
通过本章节的介绍,我们可以看到模型集成不仅在理论上有着深刻的内涵,而且在实际应用中展现出了巨大的潜力。无论是NLP、计算机视觉还是强化学习领域,模型集成技术都有着不可替代的作用,并且随着研究的深入和技术的进步,其应用前景将越来越广阔。
# 6. 总结与未来展望
## 6.1 模型集成在深度学习领域的现状总结
在过去的几年中,深度学习技术在许多领域取得了重大进展,尤其是图像识别、自然语言处理(NLP)、语音识别和预测分析等。在这些应用中,模型集成的方法已经被证明是非常有效的技术,它通过结合多种模型的预测来改善性能,降低方差,提高对新数据的泛化能力。然而,尽管模型集成在很多应用中取得了成功,它也面临着一些挑战。
### 6.1.1 当前挑战与发展趋势
随着模型集成技术在深度学习中的广泛应用,一些问题逐渐显现。例如,如何处理和集成大量不同的模型、如何选择最优的集成策略、如何管理巨大的计算资源消耗以及如何在有限的数据上取得最佳集成效果等问题。目前的挑战还包括模型集成对于黑盒模型的解释性不足和集成中各个模型之间的互补性不强。
在发展趋势方面,集成学习正朝着更自动化、智能化的方向发展。研究者们正在开发能够自动优化集成过程的算法,减少人工干预。此外,集成学习也逐步扩展到深度学习以外的领域,如半监督学习和多任务学习。
### 6.1.2 研究与实践中的创新点
在模型集成的研究与实践中,创新点体现在集成结构设计、模型选择和集成方法上。例如,最近的研究工作集中在如何有效地选择和剪枝模型,以减少计算资源的消耗,同时保持或提高集成的效果。另一个创新点是集成学习的深度化,即使用深度神经网络作为集成的单个模型,而不是传统的机器学习算法。
此外,集成学习在深度学习中的应用也催生了新的跨领域方法,如集成学习和强化学习的结合,这为解决复杂的决策问题提供了新的视角。
## 6.2 未来研究方向与技术展望
### 6.2.1 模型集成技术的前沿研究
未来的模型集成技术研究可能会关注以下几个方向:
- **模型集成的解释性**:研究者们正致力于提升集成模型的透明度,以便更好地理解模型集成的决策过程。
- **动态集成策略**:在面对非静态数据分布时,动态更新集成的策略将更加重要,以适应数据的变化。
- **集成学习的可扩展性**:随着模型和数据规模的扩大,如何高效地进行模型集成成为了一个研究焦点。
### 6.2.2 深度学习框架的集成学习支持
深度学习框架如PyTorch和TensorFlow在集成学习方面的支持也在不断进步。未来的深度学习框架可能会包括:
- **内置集成学习模块**:框架可能会内置集成学习模块,简化集成学习的实现和部署流程。
- **自动集成优化工具**:框架会提供更多的工具来辅助研究人员和工程师自动地执行模型选择、模型评估、超参数优化等任务。
- **集成模型的可视化与监控**:对集成学习模型的性能进行实时可视化与监控,帮助研究人员更好地理解模型在不同环境下的表现。
模型集成在深度学习领域中的应用前景广阔,随着研究的不断深入和技术的不断进步,我们可以预见到集成学习将为解决更加复杂的问题提供更为强大的工具。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到PyTorch模型集成专栏!在这里,我们将深入探讨模型集成技术,帮助你提升深度学习模型的性能。从实用技巧到高级技术,我们涵盖了模型集成各个方面,包括:
* 模型集成的具体方法
* Bagging和Boosting的实战指南
* 模型集成的性能调优和调试技巧
* 过拟合和欠拟合的解决方案
* 模型集成的可视化技术
* 自定义模型集成的扩展方法
通过本专栏,你将掌握模型集成的原理和实践,并能够将其应用到自己的项目中,以提高模型的准确性、鲁棒性和泛化能力。
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【电力驱动系统安全风险评估】:IEC 61800-5-1标准下的风险分析技巧

参考资源链接:[最新版IEC 61800-5-1标准:电力驱动系统安全要求](https://wenku.csdn.net/doc/7dpwnubzwr?spm=1055.2635.3001.10343)
# 1. IEC 61800-5-1标准概述
IEC 6
【硬件更新与维护攻略】:TIA博途V16维护经验分享
参考资源链接:[TIA博途V16仿真问题全解:启动故障与解决策略](https://wenku.csdn.net/doc/4x9dw4jntf?spm=1055.2635.3001.10343)
# 1. TIA博途V16基础介绍
## 1.1 TIA博途V16概览
TIA博途(Totally Integrated Automation Portal)是西门子公司
Altium 设计者的挑战:15分钟内解决元器件间距过小问题
参考资源链接:[altium中单个元器件的安全间距设置](https://wenku.csdn.net/doc/645e35325928463033a48e73?spm=1055.2635.3001.10343)
# 1. Altium Designer中的元器件布局挑战
在当今的电子设计自
MATLAB信号处理全攻略:一步到位掌握入门到高级技巧(限时免费教程)

参考资源链接:[MATLAB信号处理实验详解:含源代码的课后答案](https://wenku.csdn.net/doc/4wh8fchja4?spm=1055.2635.3001.10343)
# 1. MATLA
【BMC管理控制器深度剖析】:戴尔服务器专家指南

参考资源链接:[戴尔 服务器设置bmc](https://wenku.csdn.net/doc/647062d0543f844488e4644b?spm=1055.2635.3001.10343)
# 1. BMC管理控制器概述
BMC(Baseboard Management Controller)管理控制器是数据中心和企业级计算领域的核心组件之一。它负责监控和管理服务器的基础硬
PSCAD C语言接口实战秘籍:从零到精通的7天速成计划
参考资源链接:[PSCAD 4.5中C语言接口实战:简易积分器开发教程](https://wenku.csdn.net/doc/6472bc52d12cbe7ec306319f?spm=1055.2635.3001.10343)
# 1. PSCAD软件概述与C语言接口简介
在现代电力系统仿真领域,PSCAD(Power Systems Computer Aide
RK3588射频设计与布局:提升无线通信性能的关键技巧
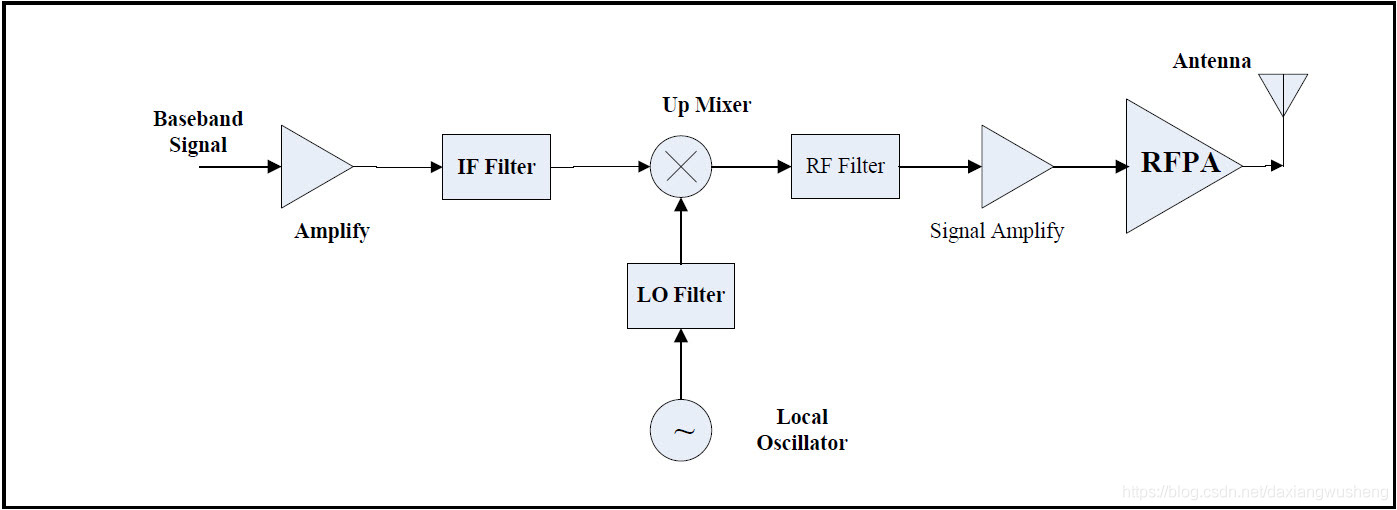
参考资源链接:[RK3588硬件设计全套资料,原理图与PCB文件下载](https://wenku.csdn.net/doc/89nop3h5n
微信视频通话质量提升必杀技:虚拟摄像头高级设置全解
参考资源链接:[使用VTube Studio与OBS Studio在微信进行虚拟视频通话的探索](https://wenku.csdn.net/doc/85s1wr0wvy?spm=1055.2635.3001.10343)
# 1. 虚拟摄像头技术概述
在信息技术高速发展的今天,虚拟摄像头技术以其独特的魅力,成为了一个引人注目的
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )