【MATLAB机器人视觉开发】:工具箱与ROS的无缝集成
发布时间: 2024-12-10 02:31:01 阅读量: 18 订阅数: 11 

MATLAB机器人工具箱.zip
# 1. MATLAB与机器人视觉基础
## 简介
机器人视觉是当今自动化和机器人技术领域中的一个关键组成部分。它赋予机器人“看到”并理解周围环境的能力,这对于执行复杂任务至关重要。MATLAB作为一种高效的数值计算和可视化工具,在机器人视觉领域中拥有广泛的应用,尤其是在算法开发、仿真和数据处理等方面。
## MATLAB的基本应用
MATLAB为机器人视觉提供了强大的编程环境。它不仅简化了数学计算和数据可视化的过程,而且还集成了多种专门的工具箱,如Image Processing Toolbox和Computer Vision Toolbox,这些工具箱对图像和视频进行处理、分析和理解提供了专门的功能。
## 机器人视觉的构成
机器人视觉系统通常包括图像采集、处理、分析和理解等环节。通过使用MATLAB及其工具箱,可以实现从图像捕获到目标检测、跟踪、场景解释以及三维重建等一系列复杂的视觉任务。下一章节将深入探讨MATLAB在这些任务中的具体应用。
# 2. MATLAB机器人视觉工具箱详解
## 2.1 工具箱中的图像处理功能
### 2.1.1 图像采集与显示
MATLAB的机器人视觉工具箱提供了一系列功能,可以方便地进行图像的采集与显示。这些功能涉及到与相机硬件的接口,如IP相机、USB相机以及其他工业标准相机接口,以及图像处理过程中基本的操作,如读取、显示、保存图像数据等。
```matlab
% 示例:图像的采集与显示
img = imread('sample_image.jpg'); % 读取图像文件
imshow(img); % 显示图像
```
在上述代码中,`imread` 函数用于读取指定路径的图像文件,而 `imshow` 函数则将读取的图像数据在MATLAB的图像窗口中显示出来。这些基础功能是后续图像处理和分析操作的前提条件。
### 2.1.2 图像增强与特征提取
图像增强通常是为了改善图像的视觉效果,提高图像质量以便于后续处理,或者提取特定的图像特征。在MATLAB中,我们可以通过调整对比度、亮度、应用滤波器等多种手段进行图像增强。
```matlab
% 示例:调整图像亮度和对比度
img_enhanced = imadjust(img, stretchlim(img), []);
% 示例:应用高斯滤波去除噪声
img_filtered = imgaussfilt(img, 2);
% 示例:边缘检测
edges = edge(img, 'Canny');
imshow(edges);
```
以上代码中,`imadjust`函数用于调整图像的亮度和对比度。`imgaussfilt`函数通过高斯滤波去除噪声。`edge` 函数则用于检测图像边缘,这里使用的是Canny算法,它是一种广泛使用的边缘检测算法。图像增强和特征提取是机器人视觉中不可或缺的步骤,直接影响到目标检测和识别的准确性。
## 2.2 工具箱中的目标跟踪与分析
### 2.2.1 目标检测方法
目标检测是机器人视觉的一个核心任务,其目的是在图像中找到感兴趣对象的位置。MATLAB提供了许多目标检测算法,包括基于传统图像处理的方法和基于深度学习的方法。
```matlab
% 示例:使用HOG特征进行目标检测
detector = vision.CascadeObjectDetector();
bbox = step(detector, img);
imshow(img);
hold on;
showShape('rectangle', bbox, 'Color', 'red');
```
在这段代码中,使用了级联对象检测器(`vision.CascadeObjectDetector`),它基于Haar特征和级联分类器进行目标检测。检测器在读取的图像 `img` 中识别出目标,并返回边界框 `bbox`。最后,使用 `showShape` 函数将识别出的目标用红色矩形框标出。
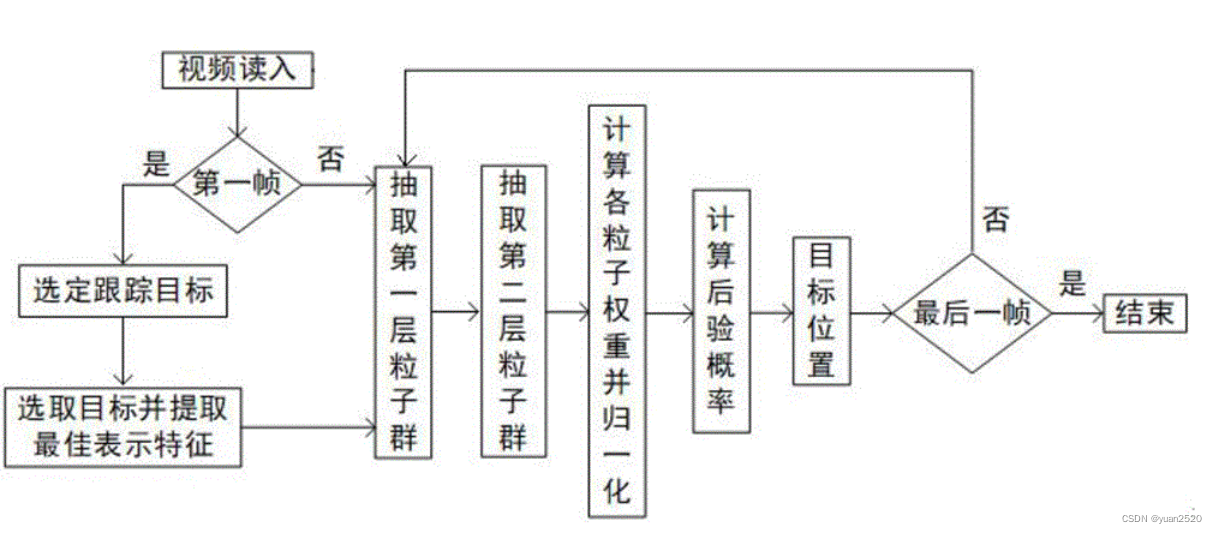
### 2.2.2 跟踪算法与评估
目标跟踪是在连续的帧中追踪一个或多个目标的位置。MATLAB提供多种跟踪算法,从基本的颜色跟踪、模板匹配到更高级的卡尔曼滤波器和深度学习跟踪器。
```matlab
% 示例:使用卡尔曼滤波器进行目标跟踪
tracker = vision.PointTracker();
initialize(tracker, pointLocation, img);
while hasFrame(inputVideo)
frame = readFrame(inputVideo);
[points, isFound] = step(tracker, frame);
if isFound
plot(points, 'ro');
tracker.OutputPoints = points;
end
drawnow;
end
```
在这段代码中,`vision.PointTracker` 用于追踪关键点。首先使用 `initialize` 函数初始化追踪器,设定初始点位置,然后在每帧视频中使用 `step` 函数更新目标位置并绘出。这里的 `plot` 函数用于绘制追踪点的位置。
## 2.3 工具箱的3D视觉与重建
### 2.3.1 立体视觉基础
立体视觉是通过两个或多个视角的图像恢复出场景的三维结构。MATLAB提供了一系列立体视觉工具箱函数来完成这个任务。
```matlab
% 示例:使用立体视觉进行深度图计算
stereoParams = estimateFundamentalMatrix(...); % 估计基础矩阵
[disparity, validity] = disparitySGM(...); % 使用半全局匹配算法计算视差图
depthMap = 1./disparity; % 计算深度图
```
在这段代码中,`estimateFundamentalMatrix` 函数用于估计立体图像对之间的基础矩阵,这是进行立体匹配的关键步骤。`disparitySGM` 函数则采用半全局匹配算法(SGM)计算视差图,即同一场景点在两个视角中的水平偏移量。最后,通过视差图计算出深度图。
### 2.3.2 点云处理与三维模型构建
点云是从现实世界场景中获取的大量点的集合,这些点位于三维空间中,用x、y、z坐标表示。处理这些点云数据,可以构建场景或物体的三维模型。
```matlab
% 示例:从深度图创建点云
ptCloud = pointCloud(depthMap);
pcd = pointCloud2(pCloud, 'Color', rgb2xyz(img));
```
在这段代码中,首先将深度图 `depthMap` 转换为点云 `ptCloud`。然后,`pointCloud2` 函数可以将图像的RGB数据转换为点云的颜色属性,这样就能够获得具有色彩信息的三维点云数据。
使用这些功能,可以完成从立体图像对中提取深度信息并重建三维场景的整个流程。这对于机器人导航、场景理解以及三维空间中的目标识别和抓取等应用至关重要。
# 3. ROS基础与MATLAB集成方法
## 3.1 ROS架构与理念
### 3.1.1 ROS核心组件
机器人操作系统(ROS)是一个用于机器人软件开发的灵活框架,它

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
MATLAB 计算机视觉工具箱是一个功能强大的工具箱,提供了一系列用于图像处理、计算机视觉和机器学习的函数和算法。该专栏深入探讨了工具箱的功能和实例,涵盖了图像增强、特征提取、模式识别、医疗影像分析、工业视觉检测、运动分析、光学字符识别、无人机视觉系统开发和机器人视觉开发等广泛的主题。通过深入浅出的讲解、丰富的代码示例和实际案例,专栏旨在帮助读者掌握工具箱的强大功能,并将其应用于各种计算机视觉项目中。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
线性规划与MATLAB的完美结合:深入解法与策略分析

参考资源链接:[最优化方法Matlab程序设计课后答案详解](https://wenku.csdn.net/doc/6472f573d12cbe7ec307a850?spm=1055.2635.3001.10343)
# 1. 线性规划基础
线性规划是运筹学中的一种重要方法,主要应用于资源优化配置、决策制定、生产规划等领域。其核心在于如何在满足一系列线性约束的条件下,寻求最优的决策变量,以最大化或最小
MATLAB信号与系统实验:从理论到实践的完整解析
参考资源链接:[MATLAB信号处理实验详解:含源代码的课后答案](https://wenku.csdn.net/doc/4wh8fchja4?spm=1055.2635.3001.10343)
# 1. MATLAB信号与系统实验概述
MATLAB信号与系统实验是电子工程、通信和相关专业教学及研究中不可或缺的一部分。本章主要介绍信号与系统实验的目的、重要性以及基本流程。信号与系统作为信息科学的基石,涵盖了从信号的采集、处理到
SINAMICS G120 CU240B-2_CU240E-2参数高级应用: 故障排除与性能调优的不传之秘

参考资源链接:[SINAMICS G120 CU240B/CU240E变频器参数手册(2016版)](https://wenku.csdn.net/doc/64658f935928463033ceb8af?spm
【BMC管理控制器深度剖析】:戴尔服务器专家指南

参考资源链接:[戴尔 服务器设置bmc](https://wenku.csdn.net/doc/647062d0543f844488e4644b?spm=1055.2635.3001.10343)
# 1. BMC管理控制器概述
BMC(Baseboard Management Controller)管理控制器是数据中心和企业级计算领域的核心组件之一。它负责监控和管理服务器的基础硬
PSCAD仿真代码优化指南:如何利用C语言接口提高性能
参考资源链接:[PSCAD 4.5中C语言接口实战:简易积分器开发教程](https://wenku.csdn.net/doc/6472bc52d12cbe7ec306319f?spm=1055.2635.3001.10343)
# 1. PSCAD仿真代码优化概述
在电力系统仿真领域,PSCAD(Power System Computer Aided Design)是一个功能强
SINAMICS S120参数设置详解:从入门到精通的5个关键步骤

参考资源链接:[西门子SINAMICS S120伺服系统调试指南](https://wenku.csdn.net/doc/64715846d12cbe7ec3ff8638?spm=1055.2635.3001.10343)
# 1. SINAMICS
WinCC 6.0 SP3 安装快速入门:一步到位的成功秘诀

参考资源链接:[WINCC6.0 SP3安装全攻略](https://wenku.csdn.net/doc/6412b73cbe7fbd1778d49933?spm=1055.2635.3001.10343)
# 1. WinCC 6.0 SP3安装前的准备工作
在进行WinCC 6.0 SP3的安装之前,确保系统满足了所有必要的先决条件是至关重要的。这一章节将为读者概述安装前需要完成的
Altium 设计优化秘籍:单个元器件间距设置提升信号完整性的方法
参考资源链接:[altium中单个元器件的安全间距设置](https://wenku.csdn.net/doc/645e35325928463033a48e73?spm=1055.2635.3001.10343)
# 1. Altium Designer简介及信号完整性基础
## Altium Designer简介
Altium Designer是电
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )