OpenCV图像处理与虚拟现实:图像处理在虚拟现实中的应用,创造身临其境的虚拟世界
发布时间: 2024-08-08 22:17:53 阅读量: 40 订阅数: 33 

Qt界面中的OpenCV图像处理:显示与基本操作.pdf

# 1. OpenCV图像处理基础**
OpenCV(Open Source Computer Vision Library)是一个开源计算机视觉库,它为图像处理、视频分析和计算机视觉提供了广泛的算法和功能。在虚拟现实(VR)领域,OpenCV发挥着至关重要的作用,因为它提供了处理和分析图像数据的工具,这些数据对于创建沉浸式和交互式VR体验至关重要。
OpenCV图像处理基础涵盖了图像处理的基本概念,包括图像表示、图像增强、图像分割和目标检测。这些基础知识对于理解和应用OpenCV在VR中的高级应用至关重要。
# 2. 图像处理在虚拟现实中的应用
图像处理在虚拟现实(VR)中扮演着至关重要的角色,为用户提供逼真的身临其境体验。本章将探讨图像处理在 VR 中的广泛应用,涵盖图像增强、分割、跟踪和配准等方面。
### 2.1 图像增强与优化
图像增强和优化是 VR 中图像处理的基础,旨在提高图像质量和视觉效果。
#### 2.1.1 图像锐化和去噪
图像锐化增强图像边缘和细节,提高图像清晰度。OpenCV 提供了多种锐化滤波器,如拉普拉斯滤波器和高斯拉普拉斯滤波器。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 应用拉普拉斯锐化滤波器
sharpened_image = cv2.filter2D(image, -1, cv2.Laplacian(image, cv2.CV_64F))
# 显示锐化后的图像
cv2.imshow('Sharpened Image', sharpened_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
去噪消除图像中的噪声,改善图像质量。OpenCV 提供了各种去噪算法,如中值滤波和高斯滤波。
```python
import cv2
# 读取图像
image = cv2.imread('noisy_image.jpg')
# 应用中值滤波去噪
denoised_image = cv2.medianBlur(image, 5)
# 显示去噪后的图像
cv2.imshow('Denoised Image', denoised_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
#### 2.1.2 图像色彩空间转换
图像色彩空间转换将图像从一种色彩空间(如 RGB)转换为另一种色彩空间(如 HSV)。这对于调整图像颜色、增强特定特征或进行图像分析非常有用。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 将 RGB 图像转换为 HSV 图像
hsv_image = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# 提取饱和度通道
saturation_channel = hsv_image[:, :, 1]
# 显示饱和度通道
cv2.imshow('Saturation Channel', saturation_channel)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
### 2.2 图像分割与目标检测
图像分割将图像划分为具有相似特征的区域,而目标检测识别并定位图像中的特定对象。
#### 2.2.1 基于边缘检测的图像分割
边缘检测识别图像中的边缘和边界,为图像分割提供基础。OpenCV 提供了多种边缘检测算法,如 Canny 算法和 Sobel 算子。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 应用 Canny 边缘检测算法
edges = cv2.Canny(image, 100, 200)
# 显示边缘检测结果
cv2.imshow('Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
#### 2.2.2 基于聚类的目标检测
聚类算法将图像像素分组到相似组中,用于检测图像中的目标。OpenCV 提供了多种聚类算法,如 k-means 聚类和层次聚类。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为 LAB 颜色空间
lab_image = cv2.cvtColor(image, cv2.COLOR_BGR2LAB)
# 应用 k-means 聚类算法
clusters = cv2.kmeans(lab_image.reshape((-1, 3)), 3)
# 获取聚类中心
cluster_centers = np.array(clusters[1])
# 显示聚类结果
segmented_image = np.zeros_like(image)
segmented_image[clusters[0] == 0] = [255, 0, 0] # 红色
segmented_image[clusters[0] == 1] = [0, 255, 0] # 绿色
segmented_image[clusters[0] == 2] = [0, 0, 255] # 蓝色
cv2.imshow('Segmented Image', segmented_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
### 2.3 图像跟踪与配准
图像跟踪跟踪图像中的运动对象,而图像配准将两幅或多幅图像对齐到同一坐标系中。
#### 2.3.1 光流法

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 OpenCV 实战项目专栏,一个从小白到专家的图像处理指南。本专栏深入解析 OpenCV 图像识别算法,揭秘图像识别原理与应用。掌握图像增强、分割、特征提取和目标检测等图像处理核心技能,并了解图像处理在计算机视觉、增强现实、虚拟现实、医疗影像、安防监控、工业检测、科学研究、教育教学、艺术创作、游戏开发、社交媒体和电子商务等领域的广泛应用。通过本专栏,您将解锁图像处理核心技术,提升处理速度与效率,打造您的图像处理项目,并探索图像处理在各个领域的创新应用。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【靶机环境侦察艺术】:高效信息搜集与分析技巧

# 摘要
本文深入探讨了靶机环境侦察的艺术与重要性,强调了在信息搜集和分析过程中的理论基础和实战技巧。通过对侦察目标和方法、信息搜集的理论、分析方法与工具选择、以及高级侦察技术等方面的系统阐述,文章提供了一个全面的靶机侦察框架。同时,文章还着重介绍了网络侦察、应用层技巧、数据包分析以及渗透测试前的侦察工作。通过案例分析和实践经验分享,本文旨在为安全专业人员提供实战指导,提升他们在侦察阶段的专业
【避免数据损失的转换技巧】:在ARM平台上DWORD向WORD转换的高效方法
# 摘要
本文对ARM平台下DWORD与WORD数据类型进行了深入探讨,从基本概念到特性差异,再到高效转换方法的理论与实践操作。在基础概述的基础上,文章详细分析了两种数据类型在ARM架构中的表现以及存储差异,特别是大端和小端模式下的存储机制。为了提高数据处理效率,本文提出了一系列转换技巧,并通过不同编程语言实
高速通信协议在FPGA中的实战部署:码流接收器设计与优化
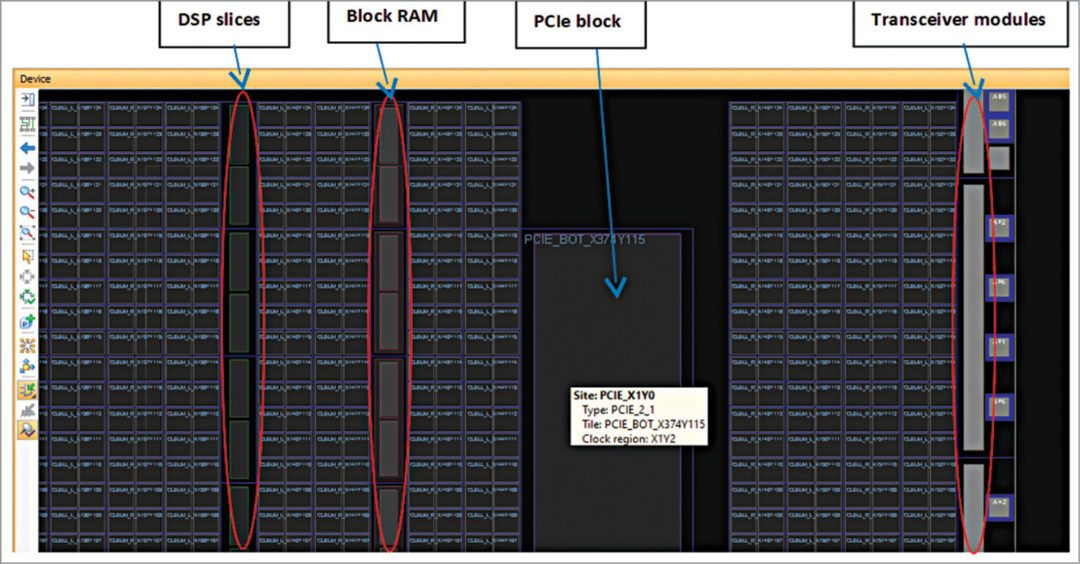
# 摘要
高速通信协议在现代通信系统中扮演着关键角色,本文详细介绍了高速通信协议的基础知识,并重点阐述了FPGA(现场可编程门阵列)中码流接收器的设计与实现。文章首先概述了码流接收器的设计要求与性能指标,然后深入讨论了硬件描述语言(HDL)的基础知识及其在FPGA设计中的应用,并探讨了FPGA资源和接口协议的选择。接着,文章通过码流接收器的硬件设计和软件实现,阐述了实践应用中的关键设计要点和性能优化方法。第
贝塞尔曲线工具与插件使用全攻略:提升设计效率的利器
# 摘要
贝塞尔曲线是图形设计和动画制作中广泛应用的数学工具,用于创建光滑的曲线和形状。本文首先概述了贝塞尔曲线工具与插件的基本概念,随后深入探讨了其理论基础,包括数学原理及在设计中的应用。文章接着介绍了常用贝塞尔曲线工具
CUDA中值滤波秘籍:从入门到性能优化的全攻略(基础概念、实战技巧与优化策略)

# 摘要
本论文旨在探讨CUDA中值滤波技术的入门知识、理论基础、实战技巧以及性能优化,并展望其未来的发展趋势和挑战。第一章介绍CUDA中值滤波的基础知识,第二章深入解析中值滤波的理论和CUDA编程基础,并阐述在CUDA平台上实现中值滤波算法的技术细节。第三章着重讨论CUDA中值滤波的实战技巧,包括图像预处理与后处理
深入解码RP1210A_API:打造高效通信接口的7大绝技
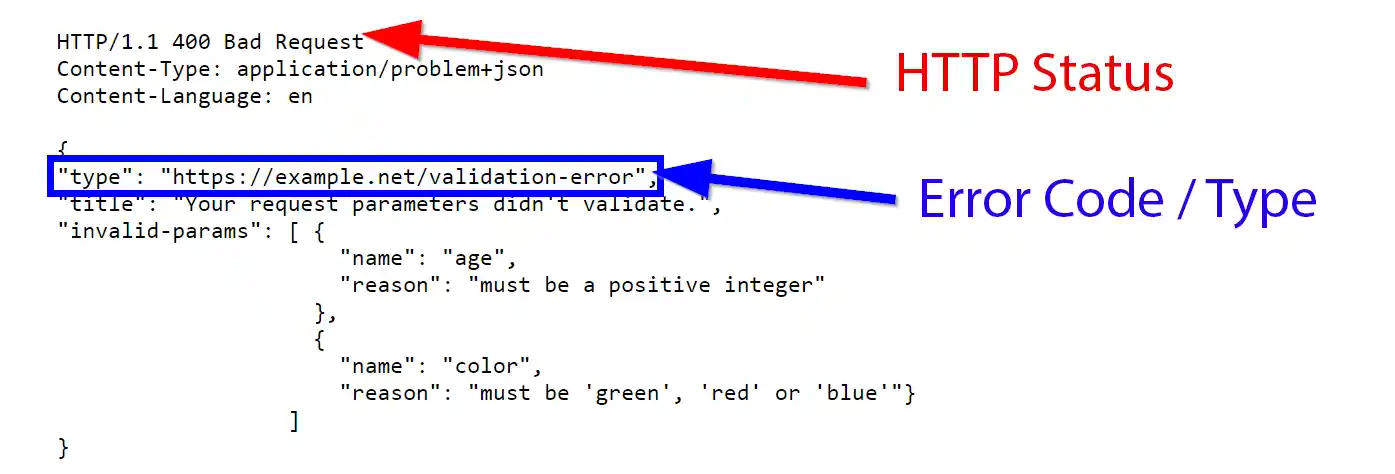
# 摘要
本文系统地介绍了RP1210A_API的架构、核心功能和通信协议。首先概述了RP1210A_API的基本概念及版本兼容性问题,接着详细阐述了其通信协议框架、数据传输机制和错误处理流程。在此基础上,文章转入RP1210A_API在开发实践中的具体应用,包括初始化、配置、数据读写、传输及多线程编程等关键点。文中还提供多个应用案例,涵盖车辆诊断工具开发、嵌入式系统集成以及跨平台通
【终端快捷指令大全】:日常操作速度提升指南
# 摘要
终端快捷指令作为提升工作效率的重要工具,其起源与概念对理解其在不同场景下的应用至关重要。本文详细探讨了终端快捷指令的使用技巧,从基础到高级应用,并提供了一系列实践案例来说明快捷指令在文件处理、系统管理以及网络配置中的便捷性。同时,本文还深入讨论了终端快捷指令的进阶技巧,包括自动化脚本的编写与执行,以及快捷指令的自定义与扩展。通过分析终端快捷指令在不同用户群体中的应用
电子建设工程预算动态管理:案例分析与实践操作指南

# 摘要
电子建设工程预算的动态管理是指在项目全周期内,通过实时监控和调整预算来优化资源分配和控制成本的过程。本文旨在综述动态管理在电子建设工程预算中的概念、理论框架、控制实践、案例分析以及软件应用。文中首先界定了动态管理的定义,阐述了其重要性,并与静态管理进行了比较。随后,本文详细探讨了预算管理的基本原则,并
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )