高级机器人动力学:【稳定移动】设计不倒翁移动平台的秘密
发布时间: 2024-12-19 06:02:31 阅读量: 2 订阅数: 2 

机器人动力学与控制_霍伟_国内某大学机器人动力学控制_
# 摘要
本文系统地介绍了高级机器人动力学的基础理论与应用实践,重点探讨了不倒翁移动平台的动力学设计和稳定性控制策略。首先,对动力学理论基础进行了详细的阐述,包括基本概念、稳定性理论分析以及运动控制理论。随后,文章深入分析了不倒翁移动平台的动力学设计,包括不倒翁机制原理、动力学模型以及稳定性控制策略。在设计实践部分,本文详细介绍了移动平台的结构设计、传感器与执行器集成,以及软件与算法实现。通过实验验证与案例分析,本文进一步展示了不倒翁移动平台在不同环境下的适应性与稳定性。最后,本文预测了未来技术创新与智能升级的趋势,并讨论了不倒翁移动平台面临的技术挑战与解决方案。整体而言,本文为不倒翁移动平台的设计与应用提供了全面的理论支持与实践指导。
# 关键字
高级机器人动力学;不倒翁机制;动力学模型;稳定性控制;实验验证;技术创新
参考资源链接:[机器人学导论第四版:第二章课后习题解析](https://wenku.csdn.net/doc/3151xwagka?spm=1055.2635.3001.10343)
# 1. 高级机器人动力学简介
在自动化和机器人技术迅猛发展的今天,高级机器人动力学作为机器人的核心支撑学科之一,已经成为推动机器人技术进步的重要力量。本章节将引领读者进入一个充满挑战与创造性的世界,它不仅涉及机器人的运动控制、稳定性分析,还与我们日常生活中常见的机器人设计息息相关。
动力学,作为物理学的一个分支,研究的是物体在外力作用下的运动规律及其变化。高级机器人动力学将这些理论应用于可编程、可控制的机器人实体,涉及到复杂的理论和实践结合,因此它既是机器人技术的基础,也是高级机器人的研发核心。
本章将为读者呈现动力学的基本概念、稳定性的理论基础和运动控制理论,为接下来章节中对不倒翁移动平台的设计与实现打下坚实的理论基础。通过对动力学的深入理解,我们将能够更好地设计出既稳定可靠又能适应复杂环境的机器人系统。
# 2. 动力学理论基础
### 2.1 动力学基本概念
动力学作为研究物体运动与其受力之间关系的学科,在机械工程、机器人技术以及其他工程领域中扮演着核心角色。本节将深入探讨力与运动学的基本原理,以及质点动力学与刚体动力学之间的差异和联系。
#### 2.1.1 力学与运动学的基本原理
力学是研究物体运动和静止状态下力的作用的科学。它是机器人设计和分析不可或缺的一部分。运动学不考虑力的作用,只研究物体的位置、速度、加速度等运动参数如何随时间变化。它为动力学提供基础数学模型,是研究复杂动力学行为的起点。
在进行动力学分析时,通常应用牛顿第二定律 \( F = ma \),其中 \( F \) 代表力,\( m \) 代表质量,\( a \) 表示加速度。此外,动量定理和角动量定理也是分析机器人运动的常用工具。动量定理描述了力与物体动量变化的关系,而角动量定理则涉及力矩和角动量之间的联系。
#### 2.1.2 质点动力学与刚体动力学
质点动力学假定物体的质量集中于一点,不考虑其尺寸与形状。这是一种理想化的分析方法,适用于机器人中某些部件,尤其是那些尺寸远小于移动距离的部件。质点动力学的方程式相对简单,主要基于质点的运动方程。
然而,刚体动力学提供了更为全面的分析框架,考虑了物体的尺寸、形状以及质量分布。刚体动力学不仅包含质点动力学的运动方程,还需要解决物体绕质心的转动问题。刚体动力学的运动方程通常是积分方程,需要计算和应用物体的惯性矩阵。例如,一个三维空间中的刚体的旋转可以通过罗德里格斯公式来描述,该公式涉及旋转轴和旋转角度。
### 2.2 稳定性的理论分析
稳定性是动力学系统研究中的核心问题之一,它关系到系统在受到外界干扰后能否保持或恢复到其稳定状态的能力。本节将介绍稳定性定义与分类,以及稳定性判据与分析方法。
#### 2.2.1 稳定性的定义与分类
稳定性在动力学系统中意味着系统的行为在受到小的扰动后,能够自我调整回到初始状态或维持在某一平衡状态。根据系统对于初始状态的依赖性,稳定性可以分为三种类型:
1. **静态稳定性**:系统在平衡状态受到小的静态扰动后,无需外力即可自动返回原平衡状态。
2. **动态稳定性**:系统在经历动态扰动(如振动)后,随时间推移能够恢复到原平衡状态。
3. **渐进稳定性**:系统偏离平衡位置后,随着时间的无限增加,状态量会趋向于某一稳定的平衡状态。
#### 2.2.2 稳定性判据与分析方法
稳定性分析的核心是稳定性判据,它为判断系统是否稳定提供数学准则。在动力学分析中,最常用的稳定性判据包括:
- **李雅普诺夫第一方法**(直接方法):通过构造一个标量函数(李雅普诺夫函数),来分析系统状态随时间变化的趋向性。
- **李雅普诺夫第二方法**(间接方法):通过线性化原非线性系统的运动方程,并利用线性系统稳定性理论来判断原系统的稳定性。
除此之外,频率法和根轨迹法也是评估系统稳定性的常用工具。例如,根据根轨迹法,可以通过绘制系统闭环传递函数的极点轨迹来判断系统在不同参数条件下的稳定性。
### 2.3 运动控制理论
运动控制理论是将控制理论应用于动力学系统的产物。在机器人技术中,控制系统的稳定性和精确性是衡量一个机器人性能的重要指标。本节将探讨控制系统的基本组成与功能,以及控制理论中的稳定性分析。
#### 2.3.1 控制系统的组成与功能
一个典型的控制系统由以下三个基本部分组成:
1. **传感器**:负责检测系统状态并输出相应信号。
2. **控制器**:根据传感器反馈的信息,计算并输出控制指令,调节系统行为。
3. **执行器**:接收控制器指令并直接作用于系统,产生必要的物理动作以实现控制目标。
控制系统的功能主要体现在对系统动态特性的精确控制以及对外界扰动的抑制能力。例如,机器人手臂需要精确地移动到期望位置并保持稳定,这就要求控制系统能够有效地对执行器进行调节。
#### 2.3.2 控制理论中的稳定性分析
在控制理论中,稳定性分析是确保控制系统正常运行的关键。一种常见的稳定性分析方法是基于线性系统理论的频率响应法,该方法主要通过分析系统的开环或闭环频率响应来判断稳定性。
例如,奈奎斯特稳定判据是频率响应法中的一种,它利用系统开环传递函数的频率响应绘制曲线,并根据曲线与特定点的相对位置关系来判断闭环系统的稳定性。如果开环增益裕度大于零,且相位裕度大于零,则闭环系统是稳定的。
另一个重要的稳定性分析方法是使用李雅普诺夫方法。通过构造李雅普诺夫函数并证明它随时间的减少,可以确保系统在受到扰动后能够趋向稳定状态。
以上章节内容的详细介绍,为理解动力学理论在实际应用中的重要性奠定了基础,同时也为后续章节中关于不倒翁移动平台的动力学设计与控制策略提供了理论支撑。
# 3. 不倒翁移动平台的动力学设计
### 3.1 不倒翁机制原理
不倒翁的力学特性不仅因其形状而闻名,而且在动力学设计中占有重要的地位。理解不倒翁的力学特性,是建立有效稳定性的关键。不倒翁能够在受到推动后自行恢复平衡,源于其低重心与圆形底部的结合,以及质量分布的特殊设计。这使得不倒翁能够在倾斜到一定角度后,重力所产生的力矩足以驱使其返回初始的垂直位置。
#### 3.1.1 力学与运动学的基本原理
在动力学设计中,运动学描述了物体的运动状态而不考虑力的作用,而力学则涉及力对物体运动状态的影响。不倒翁机制原理的精髓在于将这两种原理融合,使得即使在受到外部干扰的情况下,也能通过自身的运动学特性与质量分布来保持力学上的稳定。
#### 3.1.2 不倒翁的动态平衡理论
动态平衡理论在不倒翁设计中起到了基础性作用。动态平衡指的是当一个系统在其平衡位置附近受到小的扰动时,能够通过内部机制自动回复到初始状态,这是不倒翁能够在受到推力后仍能自行站直的原因。在设计移动平台时,将动态平衡理论运用到机械结构和控制系统中,可以显著提高机器人的稳定性。
### 3.2 移动平台的动力学模型
在不倒翁移动平台的设计中,动力学模型的建立是极其关键的步骤。这个模型不仅需要准确反映平台在受到各种力和力矩作用时的动态响应,还要能够适应不同的工作环境和条件。
#### 3.2.1 建立动力学模型的方法
构建动力学模型通常包括以下步骤:首先定义系统的自由度,然后根据物理特性写出系统方程,最后进行仿真模拟以验证模型的准确性。在实践中,可以通过多体动力学仿真软件,如ADAMS,进行建模和仿真验证,确保模型能够准确描述实际系统的动力学行为。
#### 3.2.2 动力学模型的仿真与验证
仿真验证阶段通常使用软件工具来模拟平台在各种条件下的行为,以此来测试和调整动力学模型的参数。这包括但不限于模拟不同的地面条件、速度、加速度、外部施加的力和力矩等。通过仿真可以有效地对动力学模型进行校准,确保模型的准确性和适用性。
### 3.3 稳定性控制策略
为了确保移动平台在各种条件下都能保持稳定,需要设计一套稳定性控制策略。这通常包括反馈控制系统的设计和稳定性控制算法的实现。
#### 3.3.1 反馈控制系统设计
反馈控制系统是稳定性控制的核心。系统会不断监测平台的实时状态,如位置、速度和加速度,并与预定的目标值相比较。当检测到偏差时,控制系统会计算出需要施加的控制作用,并将其传递给执行机构。这一过程会不断循环,以确保平台保持在预定的工作状态。
```mermaid
graph LR
A[传感器信号] --> B[状态估计]
B --> C[控制器]
C --> D[执行器]
D --> E[平台响应]
E --> A
```
#### 3.3.2 稳定性控制算法与实现
稳定性的控制算法是通过数学模型和控制理论实现的。例如,可以使用PID(比例-积分-微分)控制器来实现对平台的精确控制。算法的参数需要通过实验调整,以确保对不同类型的干扰都能有效响应。一旦参数调整完成,稳定性控制算法就会被编程并集成到控制软件中。
```python
# PID 控制器的伪代码实现
class PIDController:
def __init__(self, kp, ki, kd):
self.kp = kp
self.ki = ki
self.kd = kd
self.previous_error = 0
self.integral = 0
def update(self, setpoint, measured_value):
error = setpoint - measured_value
self.integral += error
derivative = error - self.previous_error
output = self.kp*error + self.ki*self.integral + self.kd*derivative
self.previous_error = error
return output
# 使用 PID 控制器
pid = PIDController(kp=1.0, ki=0.1, kd=0.05)
while True:
setpoint = desired_position
measured_value = current_position
control_signal = pid.update(setpoint, measured_value)
# 将控制信号应用到执行器
apply_control(control_signal)
```
以上代码展示了PID控制器的一个简化实现,通过调节比例(kp)、积分(ki)和微分(kd)参数来控制系统的稳定性。在不倒翁移动平台的设计实践中,此控制器将针对特定的动态平衡需求进行调整。
通过上述章节的分析和内容的探讨,我们可以看到,在动力学设计中,理解基础力学原理、建立准确的动力学模型以及实现有效的稳定性控制策略是设计不倒翁移动平台成功的关键。在第四章中,将更深入地探讨不倒翁移动平台的设计实践,包括结构设计、材料选择以及集成传感器和执行器的策略。
# 4. 不倒翁移动平台的设计实践
## 4.1 结构设计与材料选择
### 4.1.1 移动平台的结构布局
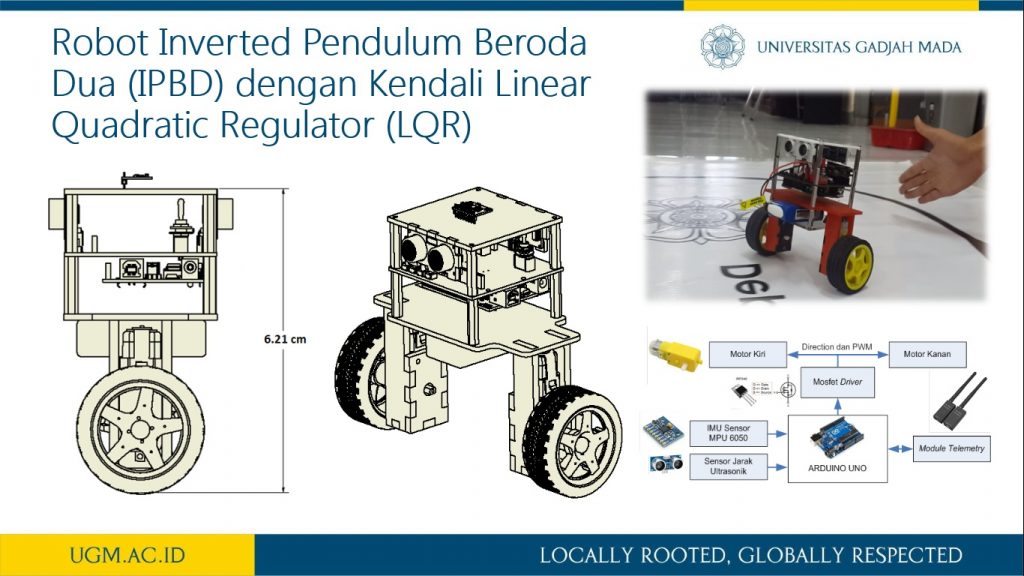
在设计不倒翁移动平台时,结构布局是至关重要的一步,它直接影响到平台的稳定性和运动性能。考虑到不倒翁的特性,平台设计首先需要保证具有一个较低的质心,以提高其在受到扰动后的自我恢复能力。通常,一个典型的不倒翁移动平台的结构由以下几个部分组成:
1. **重心定位**:重心的位置需要通过精心设计,确保无论平台如何倾斜,都能自动向平衡状态复位。
2. **驱动系统**:通常包括电机和轮子,用于实现平台的移动。
3. **支撑结构**:负责承载整体重量,同时允许平台在不同方向上倾斜一定角度。
设计时,可以采用三维建模软件(如SolidWorks)进行模拟,以验证结构布局的合理性。图4.1为一个不倒翁移动平台的三维模型示例。
### 4.1.2 关键部件的材料与工艺
选择合适的材料和制造工艺对于保证平台的结构强度和稳定性至关重要。例如,轮子和支撑结构需要使用耐磨且具有足够强度的材料,如聚碳酸酯(PC)或者ABS塑料。对于一些关键的承力部件,可以采用金属材料如铝合金或者碳钢以提高承载能力和耐久性。
在制造过程中,可以通过3D打印技术来快速制作样机并进行测试。之后,通过CNC加工进一步提升部件的精度和表面质量,确保平台在长时间运行中的稳定性。图4.2展示了一个CNC加工过程的示意图。
## 4.2 传感器与执行器的集成
### 4.2.1 传感器的选择与布局
为实现对移动平台稳定性的精确控制,必须选择合适的传感器来实时监测平台的状态。关键的传感器包括但不限于:
1. **陀螺仪**:用于测量平台的角速度,监测其旋转运动。
2. **加速度计**:测量平台的线性加速度,辅助判断平台的倾斜角度。
3. **角度传感器**:测量轮子的转向角度,对于转向控制至关重要。
图4.3表示了一个典型传感器布局的示意图,可以看到传感器被均匀地分布在平台的关键位置。
### 4.2.2 执行器的控制与反馈
执行器是实现平台动作的器件,一般采用电机来驱动轮子进行移动和转向。在执行器控制方面,需要关注以下几个关键环节:
1. **电机控制单元**:根据反馈信号对电机进行精确的速度和转向控制。
2. **电源管理**:为整个平台提供稳定且高效的电源。
3. **信号反馈**:电机和传感器的信号通过反馈机制传入控制器,实现闭环控制。
在实现过程中,可以利用PWM(脉冲宽度调制)信号控制电机的速度,确保平台动作的平滑性和精确性。图4.4展示了一个电机控制单元的示例代码。
```c
// 电机控制代码示例(伪代码)
void setMotorSpeed(int speed) {
// 通过PWM输出调整电机速度
analogWrite(motorPin, map(speed, -100, 100, 0, 255));
}
```
## 4.3 软件与算法实现
### 4.3.1 控制软件架构设计
控制软件的架构设计需要能够高效地处理传感器数据,并且能够实时地向执行器发送控制指令。一个典型的架构包括:
1. **传感器数据采集模块**:负责实时读取传感器数据,并进行初步处理。
2. **数据融合模块**:将来自不同传感器的数据进行融合处理,得出平台的即时状态。
3. **控制策略模块**:根据平台状态和预设的控制策略,计算出控制指令。
4. **执行器控制模块**:将计算出的控制指令转换为执行器的控制信号。
图4.5是一个简化的软件架构流程图。
```mermaid
graph TD
A[传感器数据采集] -->|原始数据| B[数据处理]
B -->|处理后数据| C[状态判断与控制策略]
C -->|控制指令| D[执行器控制]
D --> E[执行动作]
```
### 4.3.2 稳定性算法的软件实现与测试
实现稳定性算法是确保平台稳定运行的关键。算法的核心是通过实时监测平台的状态,计算出使平台保持平衡的控制指令。以下是一个简单的PID控制算法的实现,用于调整电机的转速以稳定平台的倾斜角度。
```c
// PID控制算法伪代码示例
float setPoint = 0; // 设定目标值,平台需要维持的角度
float Kp = 0.1; // 比例系数
float Ki = 0.05; // 积分系数
float Kd = 0.02; // 微分系数
float error; // 当前误差
float prevError; // 前一次误差
float integral; // 误差积分
float derivative; // 误差微分
float output; // PID控制器输出
void loop() {
error = setPoint - currentAngle; // 计算偏差
integral += error; // 积分项累加
derivative = error - prevError; // 计算当前误差与前一次误差之差
output = Kp*error + Ki*integral + Kd*derivative; // 计算控制器输出
motorSpeed = output; // 输出控制量到电机
prevError = error; // 更新误差值,用于下一次计算
// 其他相关控制代码
}
```
在实际应用中,还需要对算法参数进行优化,以适应不同环境和使用场景,确保平台的稳定性和可靠性。经过精心设计和反复测试,不倒翁移动平台最终能够在各种复杂环境下稳定工作,展现出卓越的稳定性能。
# 5. 实验验证与案例分析
在开发和设计出具有不倒翁机制的移动平台后,实验验证与案例分析是检验其性能的关键步骤。本章节详细探讨实验设置、测试方法以及如何进行稳定性实验结果分析,并着重在不同环境下适应性测试的研究。
## 5.1 实验设置与测试方法
### 5.1.1 实验环境的搭建
实验环境的搭建是实验验证的前提,需模拟不同的工作场景。在搭建实验环境时,首先要确保实验场地的安全性,防止设备在不稳定状态下造成伤害或者损坏。搭建环境包括平整的地面、不规则障碍物、斜坡以及可以模拟外部干扰的装置等。此外,实验场地需要有足够的空间以供平台进行各种动作,以测试其运动范围和能力。
### 5.1.2 测试指标与评价标准
评价移动平台稳定性的指标包括但不限于动态平衡程度、在特定测试周期内不倒次数、响应外部干扰的能力以及平台的运动性能等。例如,动态平衡程度可以通过平台倾斜角度的传感器读数来测量,而不倒次数则直接反映了平台的稳定性能。测试中需收集如电池使用时长、负载能力、速度等关键指标数据,以综合评价平台性能。
## 5.2 稳定性实验结果分析
### 5.2.1 实验数据的收集与处理
数据收集使用传感器及测试设备进行,包括但不限于力矩传感器、加速度计、陀螺仪、编码器等。数据处理过程中需要对原始数据进行滤波、去噪等预处理,以确保数据的准确性和可分析性。使用MATLAB、Python等数据处理软件,对收集到的数据进行统计和分析。
```python
import numpy as np
import pandas as pd
# 示例代码:数据读取与处理
# 假设已有数据存储在CSV文件中
data = pd.read_csv('experiment_data.csv')
# 对数据进行简单的预处理,例如去除无效数据
data = data.dropna()
# 计算平均值和标准差等统计数据
mean_value = data['value'].mean()
std_dev = data['value'].std()
print(f"数据平均值: {mean_value}")
print(f"数据标准差: {std_dev}")
```
### 5.2.2 稳定性实验结果的分析与讨论
在数据处理后,需要对实验结果进行详细分析。比如,分析平台在不同速度下的稳定性表现,或在遇到突加负载时的反应能力。对于不倒翁移动平台而言,倾斜角度与恢复时间是衡量稳定性的重要指标。通过统计分析方法,如方差分析(ANOVA)或t检验,对不同条件下平台的性能进行比较,可以得出其稳定性的综合评估。
## 5.3 不同环境下的适应性测试
### 5.3.1 地形适应性测试
针对不同的地形条件,如平坦地面、不规则路面、上下坡道等,测试移动平台的适应能力。平台应能在各种地形中保持稳定的移动,减少颠簸,提高运行效率。地形适应性测试结果将直接反映平台的地形适应范围及能力。
### 5.3.2 外部扰动下的稳定性测试
外部扰动测试模拟实际情况中的非预期因素,例如突然的风力、物体碰撞等。测试中要记录移动平台在这些扰动下的表现,并分析其稳定性能。对外部扰动的适应能力是判断平台实用性的关键指标。
综合所述,第五章详细介绍了实验验证和案例分析的过程,包括实验环境的搭建、测试指标的制定、实验数据的收集与处理、稳定性实验结果分析,以及不同环境下的适应性测试。这些内容不仅为不倒翁移动平台的性能提供了有力的验证,也为后续的产品改进和市场应用提供了详实的数据支撑。在下一章,我们将探讨技术的发展趋势和面临的挑战,以及不倒翁移动平台在未来可能的应用领域和市场潜力。
# 6. 未来发展趋势与挑战
在当前技术快速发展的背景下,不倒翁移动平台的未来具有广阔的发展空间,同时也面临着一系列技术挑战。本章将深入探讨不倒翁移动平台可能的技术创新与智能升级方向,应用领域的拓展潜力以及市场前景,并分析在实际应用过程中可能遇到的技术难题,并提出相应的解决方案。
## 6.1 技术创新与智能升级
随着人工智能技术的不断进步,其在稳定性控制中的应用正日益受到重视。
### 6.1.1 人工智能在稳定性控制中的应用
在不倒翁移动平台的设计中,引入人工智能算法,例如深度学习、强化学习等,可以有效地提升平台在复杂环境中的自适应能力和稳定性控制。例如,通过机器学习算法,平台可以根据历史稳定状态数据来预测和调整自身的运动策略,以应对未知的动态变化。
```python
# 示例代码:使用机器学习算法预测平衡状态
from sklearn.ensemble import RandomForestRegressor
import numpy as np
# 假设已有的平衡状态数据集,其中X是特征集,y是对应的平衡状态标签
X = np.array([...]) # 特征数据集
y = np.array([...]) # 平衡状态标签集
# 创建随机森林回归器模型
model = RandomForestRegressor(n_estimators=100, random_state=42)
# 训练模型
model.fit(X, y)
# 进行预测,预测下一个平衡状态
next_state_prediction = model.predict(next_state_features)
```
### 6.1.2 新型传感器与材料的发展趋势
传感器技术的进步能够提高移动平台对环境的感知能力,从而更好地实施稳定性控制。如使用更高精度的惯性测量单元(IMU)、视觉传感器以及雷达等,可以为平台提供更准确的环境信息。此外,新型材料如碳纤维复合材料等轻质高强度材料的应用,有助于提升平台性能,减少能量消耗。
## 6.2 应用领域拓展与市场潜力
### 6.2.1 不同行业对移动平台的需求分析
不倒翁移动平台具有广泛的应用前景,从工业巡检、救援机器人到服务机器人等,不同行业对移动平台的性能要求有所不同。例如,在救援场景中,机器人需要在复杂的户外环境中保持稳定的移动,而在工业巡检领域,精准的定位能力和长时间的续航能力则显得尤为重要。
### 6.2.2 不倒翁移动平台的市场前景预测
根据当前市场趋势和潜在需求分析,不倒翁移动平台的市场前景非常广阔。预计随着技术的成熟和成本的降低,这类平台将被更多行业和领域所采用,特别是在物流、安防以及公共服务领域。
## 6.3 面临的技术挑战与解决方案
### 6.3.1 实际应用中的技术难题
在实际应用中,不倒翁移动平台可能会遇到各种挑战,如在极端天气条件下的稳定性控制、在复杂地形中的导航问题等。这些问题需要通过技术创新来解决。
### 6.3.2 针对挑战的创新解决方案
为应对这些技术难题,可以采用以下解决方案:
1. **多传感器融合技术**:整合多种传感器信息,提高系统对环境变化的响应速度和准确度。
2. **智能算法优化**:通过训练智能算法,提升机器人在各种场景下的适应性和决策能力。
3. **模块化设计**:实现平台的模块化设计,方便在不同应用场景中快速调整和升级。
通过上述措施,不倒翁移动平台的稳定性控制能力将得到显著提升,从而能够更好地服务于各个领域的需求。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【文献综述秘籍】:揭秘电机工程学报高效引用策略
# 摘要
本文探讨了电机工程学报文献引用的重要性和实践方法,从文献引用的基本原则、在研究中的作用、到构建高效引用框架,再到案例分析与实战应用,系统地阐述了电机工程领域内引用的流程、技巧和管理工具。文章旨在指导研究人员提升文献综述质量,明确研究问题与关键词,并通过有效工具和策略进行高效文献检索、筛选和引用,以应对学术研究中的挑战和提高研究工作的效率。
# 关键字
文献引用;学术道德;
快速掌握随机信号:基础知识与工程应用的秘密武器

# 摘要
随机信号作为信息与通信、金融工程等领域的核心组成部分,其理论基础和处理技术一直是研究的热点。本文首先介绍了随机信号的基本概念和理论基础,涵盖了随机过程的数学描述、统计特性和谱分析。随后,本文深入探讨了随机信号处理的关键技术,包括
【代码质量提升秘籍】:nLint在保证代码质量中的应用

# 摘要
代码质量对于软件开发的成功至关重要,本文深入探讨了代码质量的重要性及评估标准,介绍了nLint工具的功能、优势、安装配置和定制化方法。通过分析nLint在静态与动态代码分析的应用,以及其在CI/CD流程中的整合,本文强调了其在实际开发过程中的实践应用。文中还探讨了在企业环境中如何规范化使用nLint,并分享了最佳实践。此外,本文展望了nLint
揭秘Realtek芯片性能:显示器显示效果的5大优化技巧

# 摘要
本论文全面探讨了Realtek芯片在显示器显示效果优化中的作用,从基础理论到高级技巧,包括图像信号处理、分辨率、刷新率的影响,以及驱动程序的更新与系统设置的调整。文中详细解释了色彩管理、硬件加速、HDR支持以及不同显示模式的应用,并深入分析了Realtek图像调节软件和操作系统显示效果设置的高级功能。此外,还包括了性能测试工具的介绍、测试结果的分析以及显示系统健康状态的持续监控。本文旨
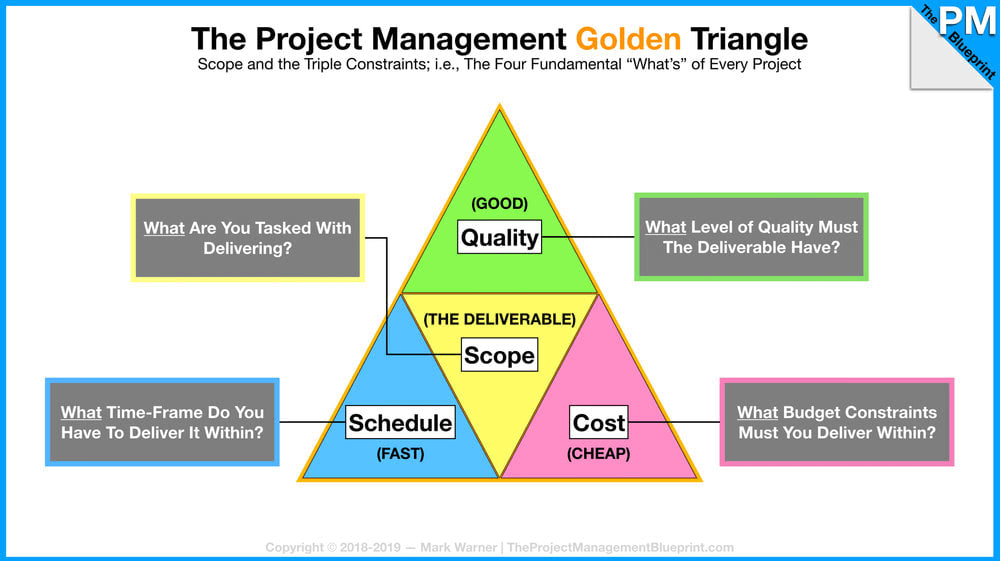
项目管理黄金法则:TR34-2012标准应用指南
# 摘要
本文旨在全面分析TR34-2012标准的应用与实施,从理论基础、核心原则到实践应用,再到行业案例与挑战应对,最后对标准的未来进行展望。文章首先概述了TR34-2012标准的重要性和理论框架,并详细解读了标准的核心原则及实施指南。通过深入探讨风险管理与质量保证的方法论和策略,文章进一步探讨了TR34-201
自动化ENVI掩膜处理流程:提升工作效率的12个策略

# 摘要
本文旨在介绍和实践自动化ENVI掩膜处理的理论基础和操作技巧。第一章概述了ENVI掩膜处理的重要性和目的,第二章探讨了自动化掩膜处理的理论基础,包括ENVI软件的介绍、自动化处理的重要性以及自动化工具和
【单位脉冲函数的10大应用】:拉普拉斯变换实战课剖析

# 摘要
本文全面探讨了单位脉冲函数的定义、特性及其与拉普拉斯变换之间的关联。首先,介绍了单位脉冲函数的基本概念和其重要性,接着深入分析了拉普拉斯变换的数学基础、标准形式、定理以及收敛域。通过对控制系统、信号处理和电路分析领域中应用案例的详细分析,本文展示了单位脉冲函数和拉普拉斯变换在理论与实践中的广泛应用。最后,论文进一步探讨了拉普拉斯变换的数值解法、在偏微分方程中的应用以及仿真与实践技巧,并提供
Tessy测试用例设计:提升测试效率的顶尖技巧

# 摘要
本文深入探讨了Tessy在测试用例设计中的应用,涵盖了理论基础、实践技巧、效率提升方法以及案例分析。首先介绍了测试用例设计的重要性、指导原则和不同类型的设计方法。其次,讨论了利用Tessy工具进行测试用例设计的过程,包括模板定制和自动化生成的流程。此外,本文还探讨了测试用例组合优化、参数化
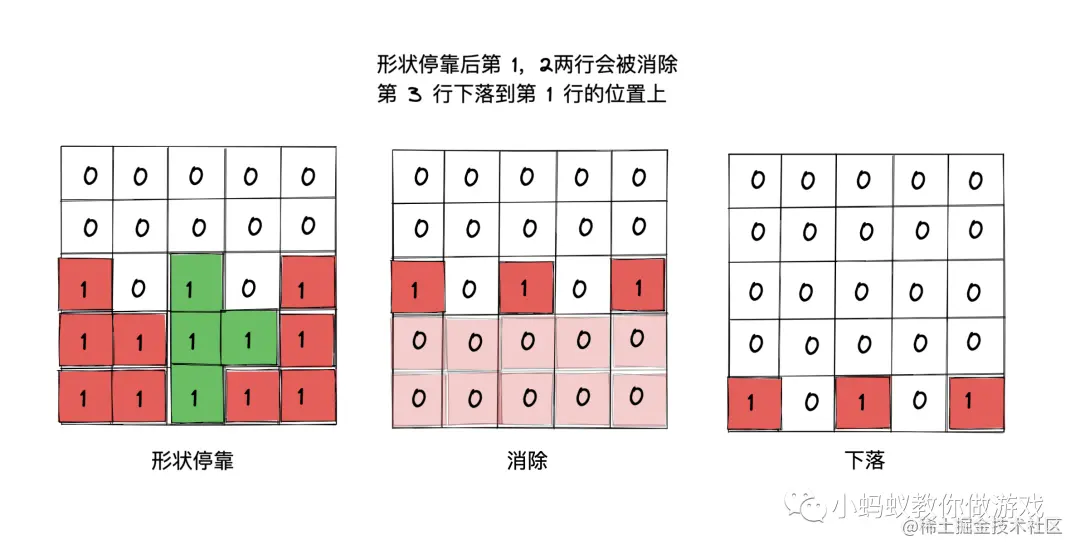
Matlab游戏开发进阶指南:俄罗斯方块逻辑优化全解析
# 摘要
本文全面探讨了使用Matlab进行游戏开发的过程,涵盖基础环境搭建、核心逻辑剖析、高级功能实现,以及性能优化和未来技术展望。首先介绍了Matlab游戏开发环境的构建,随后深入分析了俄罗斯方块游戏的核心逻辑,包括方块的结构、游戏循环设计、逻辑优化等。接着,文
GStreamer与多媒体框架集成:跨平台应用开发策略

# 摘要
本文对GStreamer多媒体框架进行了全面的介绍和分析,涵盖了多媒体基础知识、GStreamer理论、跨平台集成实践以及高级功能和优化策略。首先,本文概述了GStreamer的核心架构和插件系统,以及与其他多媒体框架的对比分析。接着,详细探讨了GStreamer在不同操作系统平台上的安装、配置和应用开发流
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )