STM32单片机编程中的常见问题:10个陷阱,揭秘失误根源
发布时间: 2024-07-05 13:33:19 阅读量: 3 订阅数: 7 

# 1. STM32单片机编程入门**
STM32单片机是一种基于ARM Cortex-M内核的微控制器,因其高性能、低功耗和丰富的外设而受到广泛应用。本章将介绍STM32单片机的基础知识,包括其架构、特性和开发环境。
**1.1 STM32单片机架构**
STM32单片机采用哈佛架构,具有独立的指令和数据存储器。其内核通常为Cortex-M0、M3或M4,提供不同的性能和功耗选择。单片机还集成了丰富的片上外设,如GPIO、定时器、ADC和UART。
**1.2 STM32单片机特性**
STM32单片机具有以下主要特性:
* 高性能:基于ARM Cortex-M内核,提供高速处理能力。
* 低功耗:采用先进的低功耗技术,可实现超低功耗运行。
* 丰富的外设:集成多种片上外设,满足各种应用需求。
* 易于开发:提供完善的开发工具和技术支持,降低开发难度。
# 2. STM32单片机编程技巧
### 2.1 STM32单片机外设配置
#### 2.1.1 时钟配置
STM32单片机具有多个时钟源,包括内部时钟(HSI)、外部时钟(HSE)和内部高速时钟(HSI)。时钟配置是单片机编程的基础,它决定了单片机的工作频率和稳定性。
```c
RCC_ClkInitTypeDef RCC_ClkInitStruct;
/* 使能 HSI 时钟 */
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HSI;
RCC_ClkInitStruct.HSIClockSource = RCC_HSI_DIV1;
RCC_ClkInitStruct.HSIPrescaler = RCC_CFGR_HPRE_DIV1;
RCC_ClkInit(&RCC_ClkInitStruct);
/* 使能 HSE 时钟 */
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HSE;
RCC_ClkInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_ClkInitStruct.HSEStartUpTimeout = RCC_HSE_STARTUP_TIMEOUT;
RCC_ClkInit(&RCC_ClkInitStruct);
/* 使能 PLL 时钟 */
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_PLL;
RCC_ClkInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_ClkInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
RCC_ClkInit(&RCC_ClkInitStruct);
/* 设置系统时钟为 PLL 时钟 */
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_SYSCLK;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInit(&RCC_ClkInitStruct);
```
代码逻辑逐行解读:
- 使能HSI时钟,并设置分频系数为1。
- 使能HSE时钟,并设置预分频系数为1。
- 使能PLL时钟,并设置PLL源为HSE,倍频系数为9。
- 设置系统时钟为PLL时钟。
#### 2.1.2 GPIO配置
GPIO(通用输入/输出)是STM32单片机中最重要的外设之一。它允许单片机与外部世界进行交互。GPIO配置包括设置引脚模式、方向和输出状态。
```c
GPIO_InitTypeDef GPIO_InitStruct;
/* 设置 GPIOA 引脚 0 为输出模式 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* 设置 GPIOA 引脚 1 为输入模式 */
GPIO_InitStruct.Pin = GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
```
代码逻辑逐行解读:
- 设置GPIOA引脚0为输出模式,推挽输出。
- 设置GPIOA引脚1为输入模式,上拉输入。
#### 2.1.3 定时器配置
定时器是STM32单片机中另一个重要的外设。它允许单片机生成精确的时间间隔和脉冲。定时器配置包括设置时钟源、分频系数和比较值。
```c
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
/* 设置 TIM2 为向上计数模式 */
TIM_TimeBaseInitStruct.CounterMode = TIM_COUNTERMODE_UP;
TIM_TimeBaseInitStruct.Prescaler = 1000;
TIM_TimeBaseInitStruct.Period = 1000;
HAL_TIM_TimeBaseInit(&htim2, &TIM_TimeBaseInitStruct);
/* 设置 TIM2 通道 1 为输出比较模式 */
TIM_OCInitStruct.OCMode = TIM_OCMODE_TIMING;
TIM_OCInitStruct.Pulse =
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏《STM32单片机编程结构》深入探讨了STM32单片机的内部架构和编程机制,旨在帮助读者全面掌握单片机的运作原理和编程技巧。专栏涵盖了10个关键模块,包括编程架构、存储器结构、中断机制、时钟系统、GPIO编程、定时器编程、ADC编程、DAC编程、SPI通信、UART通信、DMA编程、RTOS编程、外设编程、调试技巧、固件升级、应用案例、常见问题和最佳实践。通过深入浅出的讲解和丰富的实战案例,专栏旨在帮助读者轻松掌握STM32单片机编程,提升项目开发效率,探索单片机的无限可能。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Kubernetes容器编排系统基础知识与实战应用:容器化时代的利器
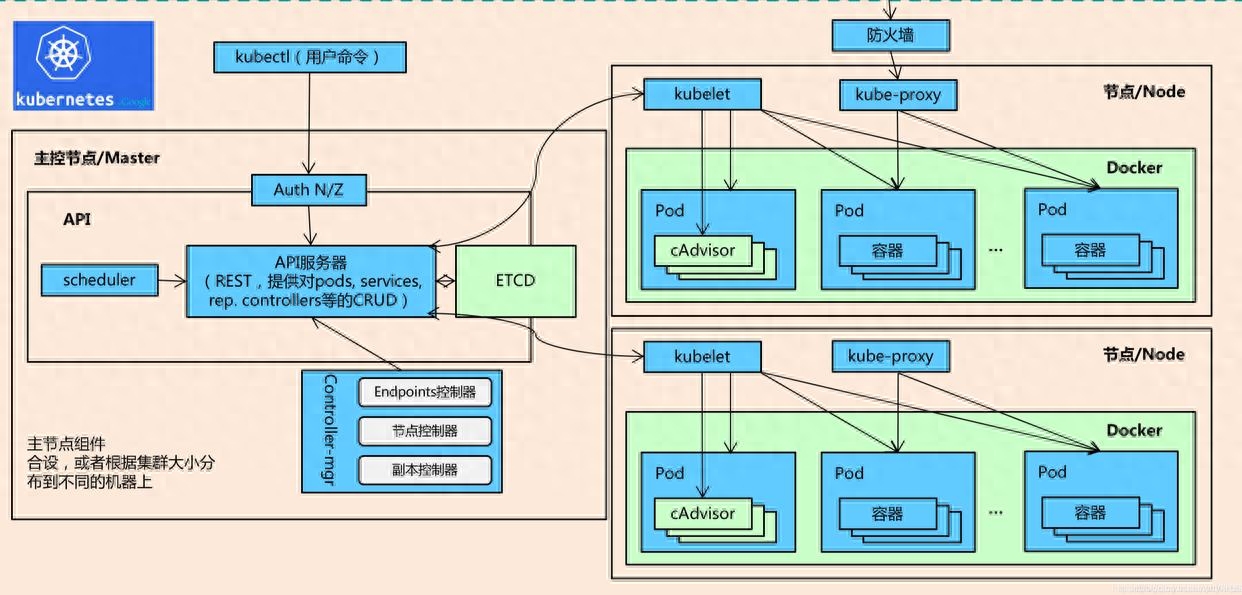
# 1. Kubernetes容器编排系统简介
Kubernetes是一个开源的容器编排系统,用于自动化部署、管理和扩展容器化应用程序。它提供了一个统一的平台,用于管理跨多个主机和云环境的容器。Kubernetes通过其强大的功能和灵活性,已成为容器编排的行业标准。
Kubernetes的核心概念包括容器、Pod、Deployment和Service。容器是轻
机器学习团队协作:版本控制、代码审查,高效协作的秘诀
# 1. 机器学习团队协作概述
机器学习团队协作对于开发和部署高质量的机器学习模型至关重要。有效的协作可确保团队成员在项目目标、任务分配和代码质量方面保持一致。
团队协作涉及多种实践,包括版本控制、代码审查、代码质量分析和协作工具的使用。通过实施这些实践,团队可以提高沟通效率、减少错误并加快开发过程。
版本控制是协作的基础,它允许团队成员在不同的时间段内跟踪和管理代码更改。代码审查是确保代码质
资深工程师技术提升:掌握数据库性能优化核心技术,成为数据库性能专家

# 1. 数据库性能优化基础**
数据库性能优化是一个持续的过程,涉及到对数据库系统进行调整和改进,以提高其性能和效率。数据库性能优化可以带来以下好处:
- 提高应用程序响应时间,改善用户体验
- 降低硬件成本,通过优化现有系统避免昂贵的硬件升级
- 提高数据库可用性,减少宕机时间和数据丢失的风险
数据库性能优化涉及到以下关键步骤:
- 监控和分析数据库性能:收集有关数据库性能指
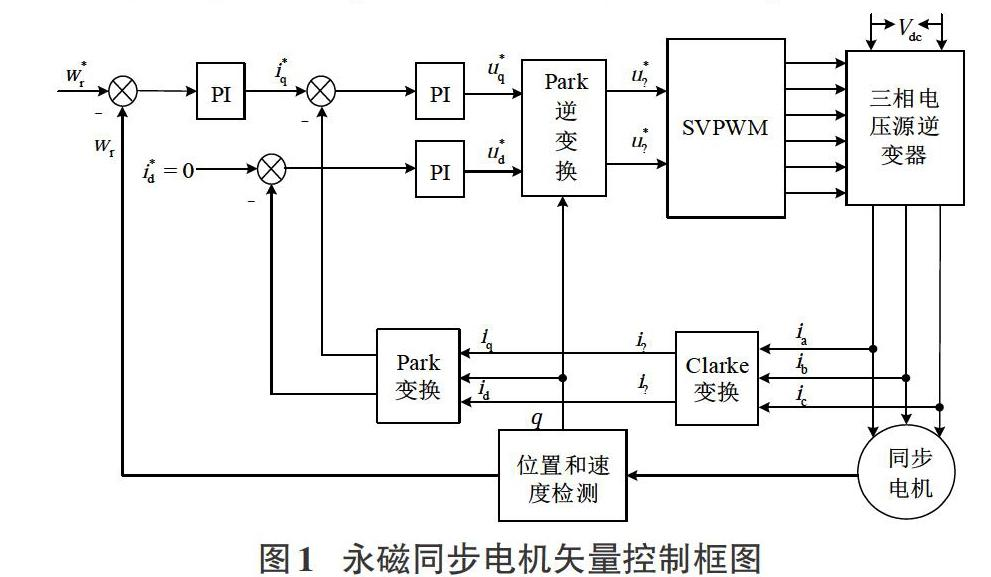
FOC控制中的表锁问题全解析:深度解读,彻底解决

# 1. FOC控制简介
FOC(Field-Oriented Control)控制是一种先进的电机控制技术,通过对电机的磁场进行定向控制,实现高精度、高效率的电机控制。FOC控制的核心思想是将交流电机等效为直流电机,通过控制电机的磁场方向和幅值来控制电机的转速和转矩。
FOC控制具有以下优点:
- 高精度:FOC控制可以实现高精度的转速和转矩控制,满足工业自动化、机器人等领域对精度的要求。
- 高效率
单片机C语言开发环境选择:IDE与编译器的利弊权衡
# 1. 单片机C语言开发环境概述**
单片机C语言开发环境是进行单片机开发的必备工具,它提供了代码编辑、编译、调试等功能,极大地提高了开发效率。开发环境主要由集成开发环境(IDE)和编译器组成,它们各有优势和劣势。
IDE集成了代码编辑器、调试器和分析工具,为开发者提供了一个全面的开发环境。而编译器则负责将源代码编译成可执行代码,具有编译效率高、可移植性强等优点。在实际开发中,根据项目复杂度和个人偏好,可以灵活选择使用IDE或编译器,或结合使用两者,以达到最佳的开发效果。
# 2. 集成开发环境(IDE)的利弊
### 2.1 IDE的优势
#### 2.1.1 集成的开发环境
MSP430单片机C语言在工业控制中的应用:电机控制、数据采集的实战指南
# 1. MSP430单片机C语言基础**
MSP430单片机是一款低功耗、高性能的16位微控制器,广泛应用于工业控制、物联网和嵌入式系统等领域。其C语言编程具有以下特点:
* **高效性:**MSP430单片机采用RISC架构,指令集精简,执行效率高。
* **低功耗:**MSP430单片机采用先进的
状态空间方法在推荐系统中的应用:打造个性化用户体验的秘诀
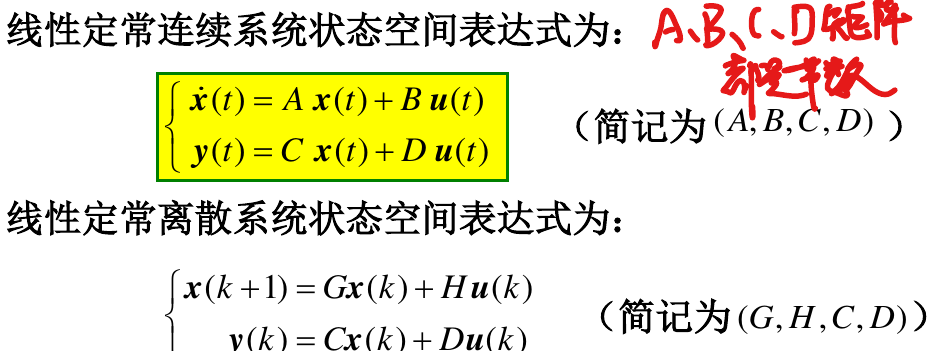
# 1. 状态空间方法的基本原理
状态空间方法是一种基于状态空间模型的机器学习技术,它将系统建模为一系列相互关联
:单片机程序设计流程图:流程图在单片机交通应用中的应用
# 1. 单片机程序设计流程图概述
流程图是一种图形化的表示方法,用于描述程序的执行流程和逻辑结构。在单片机程序设计中,流程图起着至关重要的作用,它可以帮助程序员清晰地理解和设计程序的逻辑,并方便代码的编写和调试。
流程图由一系列符号组成,每个符号代表一个特定的操
单片机程序设计中的电机控制:原理、方法与实战,让你的设备动起来
# 1. 单片机电机控制基础
单片机电机控制是利用单片机对电机进行控制的一种技术,广泛应用于工业自动化、机器人控制等领域。本章将介绍单片机电机控制的基础知识,包括电机控制原理、电机类型和单片机电机控制系统组成。
### 1.1 电机控制原理
电机控制原理是利用控制信号对电机进行控制,使其按照预期的方式运动。电机控制信号一般为电压或电流信号,通过改变控制信号的幅度、频率或相位,可以控制电机的转速、方向和扭矩。
### 1
PIC16单片机C语言异常处理机制:应对意外情况和提高系统稳定性,让单片机更可靠
# 1. PIC16单片机异常处理机制概述**
PIC16单片机异常处理机制是一种在异常事件发生时,自动执行特定操作的机制。异常事件可以是内部事件(例如复位)或外部事件(例如中断)。异常处理机制允许单片机快速有效地对异常事件做出响应,从而确保系统的稳定性和可靠性。
异常处理机制的原理是,当发生异常事件时,单片机将跳转到一个预定义的地址,称为异常向量。异常向量指向一个中断服务程序(ISR),该程序包含处理异常事件所需的代码。
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )