PMC-33M-A Modbus协议精讲:深入理解请求与响应结构
发布时间: 2024-12-21 06:37:22 阅读量: 9 订阅数: 10 

中电多功能表PMC-33M-A_Modbus通信规约_V1.1.pdf
# 摘要
Modbus协议作为一种开放、简单且广泛应用的工业通信协议,其基础概念、核心机制及应用实践对于工业自动化和控制系统具有重要意义。本文首先概述了Modbus协议的基础知识,随后深入探讨了其核心机制,包括请求与响应的数据帧结构、地址映射规则以及错误检测和异常处理方法。在此基础上,本文分析了Modbus协议在控制系统的实际应用,比较了Modbus TCP/IP与RTU的差异,并提供了调试工具和技巧。高级主题部分则介绍了Modbus的安全机制、编程实践以及协议的扩展和优化。最后,通过工业自动化领域的案例研究,本文展示了Modbus协议的实际应用效果,并对Modbus协议的未来展望与挑战进行了讨论,涵盖了与新兴通信协议的竞争与融合、标准化进程以及潜在的技术改进方向。
# 关键字
Modbus协议;通信协议;数据帧结构;地址映射;错误检测;自动化控制;工业物联网;安全机制;性能优化;标准化进程
参考资源链接:[中电PMC-33M-A三相电表Modbus V1.1通信协议详解](https://wenku.csdn.net/doc/4x4amcnuzw?spm=1055.2635.3001.10343)
# 1. Modbus协议基础概述
Modbus协议是工业通信领域广泛采用的一种开放标准协议,它源自1979年,最初由Modicon(现为施耐德电气公司的一部分)开发。这个协议主要为电子控制器之间的数据交换而设计,使用主从架构,支持多种通信模式,包括RS-232、RS-485、TCP/IP等。Modbus协议的稳定性、简便性和开放性使其成为连接多种工业设备的通用语言。简单来说,Modbus协议允许一台主设备(如PLC或工业PC)与多达247个从设备(如传感器、执行器等)进行通信,进行数据的读取和写入。
## 1.1 Modbus协议的发展历程
自从推出以来,Modbus协议经历了多个版本的更新与改进,但其核心概念保持不变。协议的原始版本是Modbus RTU,它使用二进制编码和循环冗余校验(CRC)来确保通信的可靠性和准确性。后续,又推出了基于ASCII的编码的Modbus ASCII版本。到了21世纪,随着以太网的普及,Modbus TCP版本出现,它允许设备在标准TCP/IP协议栈上通信,极大提高了网络互联的便利性。
## 1.2 Modbus协议的特点
Modbus协议之所以受到青睐,主要归功于其以下特点:
- **开放性**:作为一个开放标准,它允许不同制造商的设备进行通信。
- **简单性**:协议结构简单,易于实现,同时也易于学习和故障诊断。
- **可靠性**:通过错误检测机制,如CRC校验,保证数据在传输过程中的完整性。
- **灵活性**:支持多种传输介质和通信方式,适应不同的应用需求。
## 1.3 Modbus协议的应用场景
由于其强大的互操作性和可扩展性,Modbus协议在各种工业和商业应用中被广泛采用,包括但不限于:
- **工业自动化**:用于控制和监测生产线上的各种设备。
- **楼宇自动化**:管理智能建筑中的照明、HVAC(供暖、通风与空调)系统。
- **能源管理**:在智能电网中,监测和控制发电、输电和配电设备。
- **环境监测**:用于监测污染水平、气象条件等数据。
在下一章,我们将深入探讨Modbus协议的核心机制,包括请求与响应机制、地址映射、数据类型以及错误检测与异常处理等。这将为进一步理解Modbus在复杂系统中的应用打下坚实的基础。
# 2. Modbus协议核心机制
## 2.1 请求与响应机制
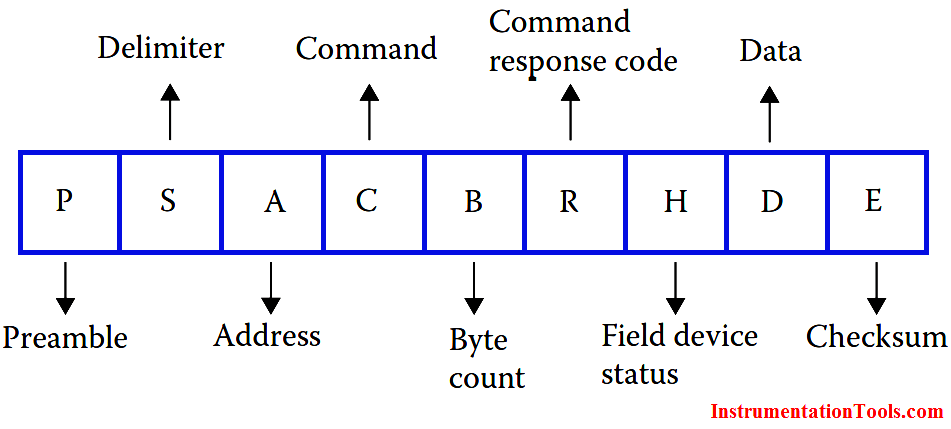
### 2.1.1 请求数据帧的组成
在Modbus协议中,客户端发起请求时,会发送一个请求数据帧至服务器。这个数据帧由多个部分组成,具体结构如下:
- 设备地址(Unit Identifier):位于数据帧的开头,指定请求的目标Modbus设备。
- 功能码(Function Code):紧随设备地址之后,指示请求的操作类型,例如读取寄存器、写入单个寄存器等。
- 数据字段(Data Field):跟随功能码,包含了具体的操作参数,如寄存器的起始地址和数量。
- 错误检测码(CRC或LRC):位于数据帧末尾,用于验证数据帧的完整性。
下面是一个请求数据帧的示例代码块及其详细解释:
```plaintext
请求数据帧示例:
01 03 00 00 00 05 C5 25
分解说明:
01 - 设备地址,表示目标设备的地址
03 - 功能码,这里是0x03,表示读取保持寄存器的操作
00 00 - 寄存器起始地址
00 05 - 寄存器数量
C5 25 - CRC校验码
```
### 2.1.2 响应数据帧的结构
与请求数据帧相对应,响应数据帧由服务器返回给客户端,其结构如下:
- 设备地址(Unit Identifier):与请求数据帧相同,表示响应的来源设备。
- 功能码(Function Code):可能会与请求中的功能码相同,或者为特定的响应码,如异常响应码。
- 数据字段(Data Field):响应操作的结果,例如寄存器的值。
- 错误检测码(CRC或LRC):与请求数据帧相同,用于数据完整性校验。
一个响应数据帧的示例代码块如下:
```plaintext
响应数据帧示例:
01 03 04 00 FF 1A 4B 80
分解说明:
01 - 设备地址,表示回应客户端请求的设备地址
03 - 功能码,此例中保持不变,为响应码
04 - 数据字段长度,表示有4个字节的数据
00 FF 1A 4B - 数据字段,寄存器实际的值
80 - CRC校验码
```
## 2.2 Modbus地址映射和数据类型
### 2.2.1 地址映射规则
Modbus协议采用统一的地址空间,其中地址0到9999用于线圈和保持寄存器,而10000到19999则用于输入线圈和输入寄存器。地址映射规则决定了Modbus命令如何操作物理或虚拟设备。
一个典型的地址映射规则如下:
```plaintext
设备地址范围 映射对象
00001-09999 保持寄存器(Holding Registers)
10001-19999 输入寄存器(Input Registers)
30001-39999 线圈(Coils)
40001-49999 离散输入(Discrete Inputs)
```
在实际应用中,例如,地址`00001`映射的保持寄存器,可能代表一个变频器的运行频率,而地址`10001`映射的输入寄存器,可能是读取温度传感器的数据。
### 2.2.2 数据类型的定义
Modbus协议支持不同类型的数据,包括二进制(线圈和离散输入)以及16位的寄存器值(保持寄存器和输入寄存器)。以下是一些主要的数据类型:
- **线圈(Coils)**:可以处于开(1)或关(0)状态的设备,常用于控制继电器、阀门等。
- **保持寄存器(Holding Registers)**:16位的寄存器,可以存储16位无符号整数,常用于存储模拟值或计数器值。
- **输入寄存器(Input Registers)**:通常用于读取,如传感器的测量值。
- **离散输入(Discrete Inputs)**:类似于线圈,但只用于读取状态,如按钮或开关的位置。
## 2.3 错误检测与异常处理
### 2.3.1 CRC校验机制
循环冗余校验(CRC)是Modbus协议中用于错误检测的核心机制。在数据帧的末尾附加一个CRC码,用以验证数据在传输过程中是否发生变化。
CRC计算过程涉及多项式运算,并对整个数据帧进行位运算,最终生成一个校验码。客户端和服务器都会进行这一计算过程,并比对结果是否一致来确定数据帧是否准确无误。
下面是一个简单的CRC校验逻辑的代码块:
```c
uint16_t calculateCRC(uint8_t *data, uint16_t numBytes) {
uint16_t crc = 0xFFFF; // 初始值
for (int i = 0; i < numBytes; ++i) {
crc ^= data[i]; // 对数据帧每个字节进行异或操作
for (int j = 0; j < 8; ++j) { // 每次处理一个位
if (crc & 0x0001) { // 如果CRC的最低位为1
crc >>= 1; // 右移一位
crc ^= 0xA001; // 异或预定义的多项式
} else {
crc >>= 1; // 否则只右移一位
}
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
专栏《中电多功能表PMC-33M-A_Modbus通信规约_V1.1.pdf》是一份全面的指南,涵盖了中电多功能表PMC-33M-A的Modbus通信协议。它提供了深入的理论知识、实用的指南和故障排除技巧。
专栏内容包括:
* Modbus通信实战指南:连接和数据交换技巧
* 错误诊断宝典:快速定位和解决通信难题
* 通信优化手册:提升传输效率的策略
* 协议精讲:深入理解请求和响应结构
* 通信故障解决速查手册:常见问题的快速应对
* 通信规范深度剖析:从细节到逻辑的全面解读
* 编程实战:多语言通信实现指南
* 通信性能提升:综合测试和优化方案
* 网络部署攻略:构建高效稳定的网络架构
* 通信故障案例研究:防止错误的策略和技巧
* 通信协议拓展:探索自定义功能码的潜力
该专栏为工程师、技术人员和系统集成商提供了宝贵的资源,帮助他们有效地使用Modbus协议与PMC-33M-A多功能表进行通信。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
供应链革新:EPC C1G2协议在管理中的实际应用案例
# 摘要
EPC C1G2协议作为一项在射频识别技术中广泛采用的标准,在供应链管理和物联网领域发挥着关键作用。本文首先介绍了EPC C1G2协议的基础知识,包括其结构、工作原理及关键技术。接着,通过分析制造业、物流和零售业中的应用案例,展示了该协议如何提升效率、优化操作和增强用户体验。文章还探讨了实施EPC C1G2协议时面临的技术挑战,并提出了一系列解决方案及优化策略。最后,本文提供了一份最佳实践指南,旨在指导读者顺利完成EPC C1G2协议的实施,并评估其效果。本文为EPC C1G2协议的深入理解和有效应用提供了全面的视角。
# 关键字
EPC C1G2协议;射频识别技术;物联网;供应链管
【数据结构与算法实战】

# 摘要
数据结构与算法是计算机科学的基础,对于软件开发和系统设计至关重要。本文详细探讨了数据结构与算法的核心概念,对常见数据结构如数组、链表、栈、队列和树等进行了深入分析,同
【Ansys参数设置实操教程】:7个案例带你精通模拟分析
# 摘要
本文系统地介绍了Ansys软件中参数设置的基础知识与高级技巧,涵盖了结构分析、热分析和流体动力学等多方面应用。通过理论与实际案例的结合,文章首先强调了Ansys参数设置的重要性,并详细阐述了各种参数类型、数据结构和设置方法。进一步地,本文展示了如何在不同类型的工程分析中应用这些参数,并通过实例分析,提供了参数设置的实战经验,包括参数化建模、耦合分析以及参数优化等方面。最后,文章展望
【离散时间信号与系统】:第三版习题解密,实用技巧大公开

# 摘要
离散时间信号与系统的分析和处理是数字信号处理领域中的核心内容。本文全面系统地介绍了离散时间信号的基本概念、离散时间系统的分类及特性、Z变换的理论与实践应用、以及离散时间信号处理的高级主题。通过对Z变换定义、性质和在信号处理中的具体应用进行深入探讨,本文不仅涵盖了系统函数的Z域表示和稳定性分析,还包括了Z变换的计算方法,如部分分式展开法、留数法及逆Z变换的数值计算方法。同时,本文还对离散时间系
立体声分离度:测试重要性与提升收音机性能的技巧

# 摘要
立体声分离度是评估音质和声场表现的重要参数,它直接关联到用户的听觉体验和音频设备的性能。本文全面探讨了立体声分离度的基础概念、测试重要性、影响因素以及硬件和软件层面的提升措施。文章不仅分析了麦克风布局、信号处理技术、音频电路设计等硬件因素,还探讨了音频编辑软件、编码传输优化以及后期处理等软件策略对分离度的正面影响。通过实战应用案例分析,本文展示了在收音机和音频产品开
【热分析高级技巧】:活化能数据解读的专家指南
# 摘要
热分析技术作为物质特性研究的重要方法,涉及到对材料在温度变化下的物理和化学行为进行监测。本论文全面概述了热分析技术的基础知识,重点阐述了活化能理论,探讨了活化能的定义、重要性以及其与化学反应速率的关系。文章详细介绍了活化能的多种计算方法,包括阿伦尼乌斯方程及其他模型,并讨论了活化能数据分析技术,如热动力学分析法和微分扫描量热法(DSC)。同时,本文还提供了活化能实验操作技巧,包括实验设计、样品准备、仪器使用
ETA6884移动电源温度管理:如何实现最佳冷却效果

# 摘要
本论文旨在探讨ETA6884移动电源的温度管理问题。首先,文章概述了温度管理在移动电源中的重要性,并介绍了相关的热力学基础理论。接着,详细分析了移动电源内部温度分布特性及其对充放电过程的影响。第三章阐述了温度管理系统的设计原则和传感器技术,以及主动与被动冷却系统的具体实施。第四章通过实验设计和测试方法评估了冷却系统的性能,并提出了改进策略。最后,
【PCM测试高级解读】:精通参数调整与测试结果分析
# 摘要
PCM测试作为衡量系统性能的重要手段,在硬件配置、软件环境搭建以及参数调整等多个方面起着关键作用。本文首先介绍PCM测试的基础概念和关键参数,包括它们的定义、作用及其相互影响。随后,文章深入分析了测试结果的数据分析、可视化处理和性能评估方法。在应用实践方面,本文探讨了PCM测试在系统优化、故障排除和性能监控中的实际应用案例。此外,文章还分享了PCM测试的高级技巧与最佳实践,并对测试技术未来
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )