揭秘8051单片机C语言陷阱:10个常见错误及解决方案,助你避免开发误区
发布时间: 2024-07-07 11:49:01 阅读量: 101 订阅数: 28 

8051单片机C语言彻底应用.pdf

# 1. 8051单片机C语言简介**
8051单片机C语言是一种专门针对8051单片机设计的编程语言。它融合了C语言的简洁性和8051单片机的硬件特性,为嵌入式系统开发提供了强大的工具。
C语言在8051单片机上的应用具有以下优势:
* **代码可移植性:**C语言是一种标准化的语言,代码可以在不同的8051单片机上移植,无需进行重大修改。
* **结构化编程:**C语言支持结构化编程,使代码易于理解、维护和调试。
* **丰富的库函数:**8051单片机C语言提供了丰富的库函数,简化了硬件操作和外围设备的访问。
# 2. 8051单片机C语言陷阱
在8051单片机C语言编程中,存在着一些常见的陷阱,如果不加以注意,可能会导致程序出现错误或异常行为。本章节将详细介绍这些陷阱,并提供相应的解决方案。
### 2.1 变量定义和初始化陷阱
**陷阱:** 未经初始化就使用变量。
**原因:** 8051单片机中的变量在未经初始化的情况下,会包含不确定的值,这可能会导致程序产生不可预测的行为。
**解决方案:** 在使用变量之前,必须对其进行初始化。可以通过在变量声明时指定初始值或使用`#pragma sfr`指令来实现。
```c
// 初始化变量为 0
unsigned char a = 0;
// 使用 #pragma sfr 初始化寄存器变量
#pragma sfr P1 = 0x90
```
### 2.2 指针使用陷阱
**陷阱:** 使用空指针或越界指针。
**原因:** 空指针指向一个不存在的内存地址,而越界指针指向超出分配内存范围的地址。这两种情况都会导致程序崩溃或产生不可预测的行为。
**解决方案:** 在使用指针之前,必须确保其指向有效的内存地址。可以使用`NULL`来表示空指针,并使用数组边界检查来防止指针越界。
```c
// 检查指针是否为 NULL
if (ptr == NULL) {
// 处理空指针的情况
}
// 检查数组索引是否越界
if (index < 0 || index >= ARRAY_SIZE) {
// 处理数组越界的情况
}
```
### 2.3 数据类型转换陷阱
**陷阱:** 未经显式转换就进行数据类型转换。
**原因:** 8051单片机中的数据类型转换规则与其他平台不同。如果不显式指定转换,可能会导致数据丢失或错误的转换结果。
**解决方案:** 在进行数据类型转换时,必须使用`(type)`强制转换符。
```c
// 将无符号字符转换为有符号整数
int value = (int)ch;
// 将有符号整数转换为无符号字符
unsigned char ch = (unsigned char)value;
```
### 2.4 数组越界陷阱
**陷阱:** 访问数组越界的元素。
**原因:** 数组越界是指访问数组中超出其范围的元素。这会导致程序崩溃或产生不可预测的行为。
**解决方案:** 在访问数组元素时,必须确保索引在数组范围内。可以使用数组边界检查或使用`sizeof`运算符来获取数组大小。
```c
// 检查数组索引是否越界
if (index < 0 || index >= ARRAY_SIZE) {
// 处理数组越界的情况
}
// 使用 sizeof 获取数组大小
int array_size = sizeof(array) / sizeof(array[0]);
```
### 2.5 函数调用陷阱
**陷阱:** 调用不存在的函数或传递错误的参数。
**原因:** 调用不存在的函数会导致程序崩溃,而传递错误的参数可能会导致程序产生不可预测的行为。
**解决方案:** 在调用函数之前,必须确保函数存在并且参数正确。可以使用函数原型或编译器警告来检查函数调用。
```c
// 检查函数是否存在
if (function_ptr != NULL) {
// 调用函数
function_ptr();
}
// 使用编译器警告检查参数类型
void function(int a, float b) __attribute__((warn_unused_result));
```
# 3.1 I/O端口操作
### 3.1.1 端口寄存器
8051单片机共有4个8位I/O端口,分别为P0、P1、P2和P3。每个端口都有一个对应的端口寄存器,用于控制该端口的输入/输出方向和数据读写。
- **P0端口寄存器 (P0)**:控制P0端口的8个引脚的输入/输出方向和数据读写。
- **P1端口寄存器 (P1)**:控制P1端口的8个引脚的输入/输出方向和数据读写。
- **P2端口寄存器 (P2)**:控制P2端口的8个引脚的输入/输出方向和数据读写。
- **P3端口寄存器 (P3)**:控制P3端口的8个引脚的输入/输出方向和数据读写。
### 3.1.2 设置端口方向
要将端口引脚配置为输入或输出,需要设置端口寄存器的相应位。
- **将端口引脚配置为输入**:将端口寄存器的对应位清零(置为0)。
- **将端口引脚配置为输出**:将端口寄存器的对应位置一(置为1)。
例如,要将P0端口的第3个引脚配置为输入,可以执行以下操作:
```c
P0 &= ~(1 << 3); // 将 P0.3 引脚配置为输入
```
### 3.1.3 读写端口数据
要读写端口数据,需要访问端口寄存器。
- **读取端口数据**:直接读取端口寄存器即可获得端口引脚上的数据。
- **写入端口数据**:将要写入的数据写入端口寄存器即可将数据输出到端口引脚上。
例如,要读取P1端口的数据,可以执行以下操作:
```c
uint8_t data = P1; // 读取 P1 端口的数据
```
### 3.1.4 端口操作示例
以下是一个使用C语言对8051单片机I/O端口进行操作的示例:
```c
#include <reg51.h>
void main() {
// 将 P0.3 引脚配置为输入
P0 &= ~(1 << 3);
// 将 P1.2 引脚配置为输出
P1 |= (1 << 2);
// 读取 P1 端口的数据
uint8_t data = P1;
// 将 data 写入 P2 端口
P2 = data;
}
```
在该示例中,P0.3引脚被配置为输入,P1.2引脚被配置为输出。然后,读取P1端口的数据并将其写入P2端口。
# 4.1 位操作
在嵌入式系统中,位操作是一种非常有用的技术,它允许程序员直接操作单个位。8051 单片机提供了丰富的位操作指令,可以高效地执行各种位操作任务。
### 位操作指令
8051 单片机支持以下位操作指令:
| 指令 | 描述 |
|---|---|
| SETB | 将指定位设置为 1 |
| CLR | 将指定位清除为 0 |
| CPL | 对指定位取反 |
| SWAP | 交换指定位的两个值 |
| MOVC | 将源寄存器中的值移动到目标寄存器中,并根据指定的位掩码进行位操作 |
### 位掩码
位掩码是一个二进制数,用于指定要操作的位。掩码中的每个位对应于要操作的寄存器中的一个位。如果掩码中的位为 1,则相应寄存器中的位将被操作;如果掩码中的位为 0,则相应寄存器中的位将保持不变。
例如,以下代码将寄存器 R0 中的第 3 位设置为 1:
```c
SETB 3, R0
```
### 应用
位操作在嵌入式系统中有很多应用,包括:
* **控制 I/O 设备:**许多 I/O 设备使用位来控制其功能。例如,可以将位设置为 1 以打开 LED,或将位清除为 0 以关闭 LED。
* **通信:**位操作可用于解析和生成通信协议。例如,可以将位设置为 1 以表示开始位,或将位清除为 0 以表示停止位。
* **数据处理:**位操作可用于执行各种数据处理任务,例如提取数据字段、设置标志位和执行逻辑运算。
### 代码示例
以下代码示例演示了如何使用位操作来控制 LED:
```c
#define LED_PORT P1
#define LED_BIT 3
void main() {
// 将 LED 端口设置为输出
P1MDOUT |= (1 << LED_BIT);
// 打开 LED
SETB LED_BIT, LED_PORT;
// 延时
delay_ms(1000);
// 关闭 LED
CLR LED_BIT, LED_PORT;
}
```
在这个示例中,`LED_PORT` 和 `LED_BIT` 宏用于指定 LED 的端口和位号。`P1MDOUT` 寄存器用于将 LED 端口设置为输出。`SETB` 指令用于将 LED 位设置为 1,打开 LED。`CLR` 指令用于将 LED 位清除为 0,关闭 LED。
# 5.1 编译错误
### 标识符错误
- **未定义标识符:**编译器无法识别标识符,可能是拼写错误或未在程序中声明。
- **重复声明标识符:**在同一作用域内重复声明了相同的标识符。
- **标识符长度过长:**标识符超过了编译器允许的最大长度。
### 语法错误
- **缺少分号:**语句末尾缺少分号。
- **括号不匹配:**括号未正确配对。
- **缺少大括号:**复合语句(如函数、循环、条件语句)缺少大括号。
### 类型错误
- **类型不匹配:**操作数的类型与运算符或函数的参数类型不匹配。
- **类型转换错误:**尝试将一种类型的值转换为另一种类型时出错。
- **数组越界:**访问数组元素时,索引超出数组边界。
### 预处理错误
- **宏未定义:**使用未定义的宏。
- **宏参数错误:**宏参数数量或类型不正确。
- **文件包含错误:**包含的文件不存在或无法打开。
### 链接错误
- **符号未定义:**链接器无法找到程序中引用的符号。
- **符号重复定义:**在多个对象文件中定义了相同的符号。
- **库文件未找到:**链接器无法找到程序所需的库文件。
### 解决编译错误
1. 仔细检查代码,查找拼写错误、语法错误和类型错误。
2. 使用编译器提供的错误信息,确定错误的具体位置和类型。
3. 根据错误类型,修改代码以解决问题。
4. 重新编译程序,确保所有错误已修复。
## 5.2 运行时错误
### 数组越界
- **访问超出数组边界:**在数组中使用无效的索引。
### 指针错误
- **空指针引用:**使用未初始化或指向无效内存位置的指针。
- **指针越界:**指针指向超出分配内存范围的地址。
### 算术错误
- **除以零:**尝试将一个数字除以零。
- **整数溢出:**整数运算结果超出整数范围。
### 堆栈溢出
- **递归调用过多:**函数不断递归调用自身,导致堆栈空间耗尽。
- **局部变量过多:**函数中声明了过多的局部变量,导致堆栈空间耗尽。
### 解决运行时错误
1. 使用调试器或日志记录来识别错误发生的具体位置。
2. 检查数组索引、指针值和算术运算,确保它们有效且不会导致错误。
3. 优化代码以减少递归调用和局部变量的使用。
4. 确保程序在运行时具有足够的堆栈空间。
## 5.3 调试技巧
### 使用调试器
- **断点:**在代码中设置断点,以在特定位置暂停程序执行。
- **单步执行:**逐行执行代码,检查变量值和程序状态。
- **查看变量:**检查变量的值,以识别错误或异常行为。
### 日志记录
- **打印日志:**在程序中添加日志语句,以记录程序执行期间的重要信息。
- **分析日志:**检查日志文件,以识别错误或异常行为的根源。
### 代码审查
- **同行评审:**让其他开发人员审查代码,以发现潜在错误或改进建议。
- **静态分析工具:**使用静态分析工具,以自动检测代码中的潜在问题。
### 单元测试
- **编写单元测试:**为程序的各个部分编写测试用例,以验证其正确性。
- **运行单元测试:**运行单元测试,以识别错误或异常行为。
# 6.1 编码规范
### 6.1.1 命名约定
* 使用有意义且描述性的变量名、函数名和宏定义。
* 变量名应以小写字母开头,后续单词首字母大写(驼峰命名法)。
* 函数名应以小写字母开头,后续单词首字母大写(帕斯卡命名法)。
* 宏定义应全部大写,单词之间用下划线分隔。
### 6.1.2 代码格式
* 遵循一致的缩进风格,推荐使用 4 个空格或一个制表符。
* 使用花括号括起所有代码块,即使只有一行代码。
* 使用空行和注释来分隔不同的代码段。
* 避免使用过长的行,推荐不超过 80 个字符。
### 6.1.3 注释
* 为所有非平凡的代码添加注释,解释其目的和功能。
* 使用清晰简洁的语言,避免冗余。
* 使用 `//` 注释单行代码,使用 `/* ... */` 注释多行代码。
### 6.1.4 数据类型
* 谨慎选择数据类型,以优化内存使用和性能。
* 优先使用 `unsigned` 类型,除非有符号值是必需的。
* 使用 `typedef` 定义自定义数据类型,以提高可读性和可维护性。
### 6.1.5 数组和指针
* 始终对数组进行边界检查,以避免越界访问。
* 使用指针时,确保它们指向有效的内存地址。
* 避免使用空指针,并使用 `NULL` 来表示无效指针。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《8051系列单片机C程序设计完全手册》专栏是一份全面的指南,为初学者和经验丰富的程序员提供8051单片机C语言编程的深入知识。该专栏涵盖了从基础到高级主题,包括:
* 从头开始的编程指南,帮助新手快速入门
* 常见的编程陷阱和解决方案,避免开发误区
* 优化技巧,提升程序性能
* 中断编程,实现实时响应
* 定时器编程,精确控制时间
通过深入浅出的讲解、丰富的示例和实用技巧,该专栏旨在帮助读者掌握8051单片机C语言编程的方方面面,打造高性能嵌入式系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
易语言与FPDF库的终极指南:打造个性化PDF报告生成器

# 摘要
易语言是一种简化的编程语言,适合中文用户快速开发软件。FPDF库是一个开源的PHP类,能够方便地生成PDF文件。本文旨在介绍易语言与FPDF库的结合使用,涵盖基础使用、实践应用以及进阶功能开发等方面。通过理论与实践相结合的方式,本论文着重讲解了如何在易语言中配置和操作FPDF库,
Windows XP本地权限提升漏洞深度剖析:secdrv.sys漏洞的成因与影响

# 摘要
secdrv.sys漏洞作为影响Windows XP系统安全的关键性问题,本文对其进行系统的概述、成因分析、影响评估以及防御与修复策略的探讨。通过深入解析secdrv.sys内核驱动在系统安全中的作用和漏洞的技术背景,本文揭示了权限提升漏洞的类型和特点以及secdrv.sys漏洞的成因和利用机制。基于对漏洞对系统安全影响的评估,本文提出了一系列系统加固和漏洞修复的策略,包括最小化权限设置
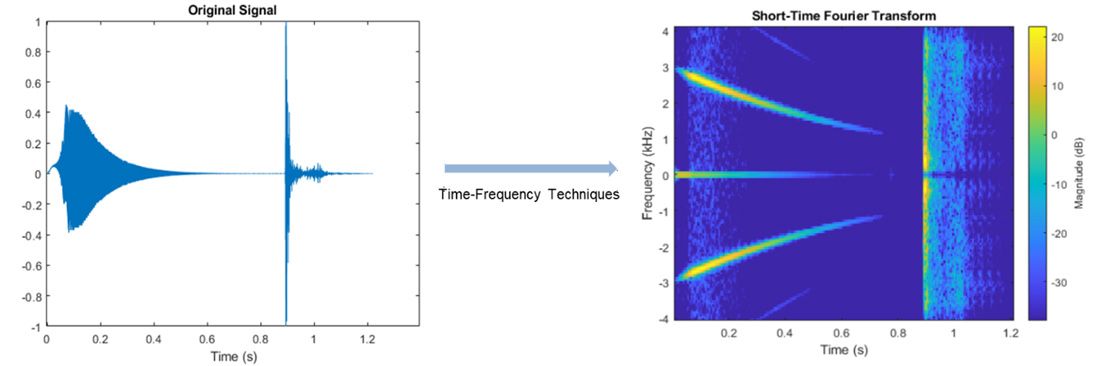
【波形变化检测大揭秘】

# 摘要
波形变化检测技术在多个领域如医疗健康、工业自动化中扮演着至关重要的角色。本文首先对波形信号的基础理论进行了概述,随后深入探讨了波形变化检测的关键技术原理,包括信号处理的滤波技术和变化点检测算法。接着,本文介绍了波形变化检测方法在实践中的应用,并通过实时监测技术和常用算法的实现进行了详细分析。在此基础上,本文还探讨了波形变化检测技术在不同领域的应用案例,并
数字信号处理工具箱:Matlab在信号分析与处理中的应用案例
# 摘要
数字信号处理是现代信息技术中的关键领域,其理论和应用在不断进步。本文首先回顾了数字信号处理的基础知识,然后详细介绍了Matlab在信号处理中的基本功能,包括信号生成、分析方法以及系统模拟。通过实际案例,本文阐述了Matlab在声音、图像和生物医学信号处理中的实战应用。进一步,文章探讨了Matlab信号处理的进阶技巧,如自定义
深入解析EtherCAT协议:Linux下的完整应用教程
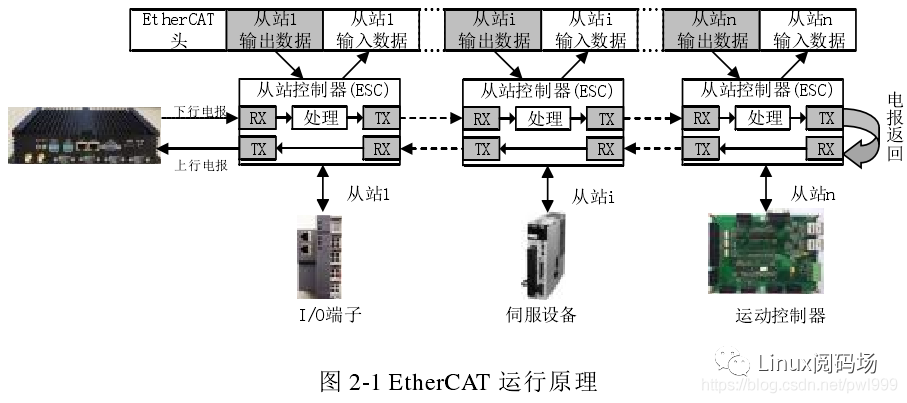
# 摘要
本文全面介绍了EtherCAT协议,包括其核心特征、网络架构、帧结构、Linux下的配置与测试以及应用开发实践。通过深入分析实时性能、从站设备通信原理、网络拓扑构建、内核模块配置、主从站配置和调试步骤,本文为EtherCAT技术在Linux环境下的实现提供了详尽的指导。文章还探讨了EtherCAT在应用开发中的实践,包
ICM-42607深度剖析:从数据采集到信号处理的专业指南
# 摘要
ICM-42607传感器是一种多功能惯性测量单元,具备高精度的数据采集能力,适用于多种应用开发环境。本文从ICM-42607的概述出发,深入探讨其数据采集原理、硬件连接配置以及软件实现方法。接着,文章详细分析了信号处理的各个阶段,包括信号的预处理、核心算法应用以及后处
【动态网络分析】:MOBIL模型在城市交通仿真中的高级应用

# 摘要
动态网络分析是一种用于分析城市交通流量和车辆行为的先进技术。本文首先介绍了动态网络分析和MOBIL模型的理论基础,阐述了其核心要素和与静态网络分析的区别。随后,深入探讨了MOBIL模型的理论框架、数学表达以及在城市交通仿真中的实现,通过案例分析验证了模型的实际应
【STM32新手必看】:3个步骤,用uVision5构建你的第一个工程
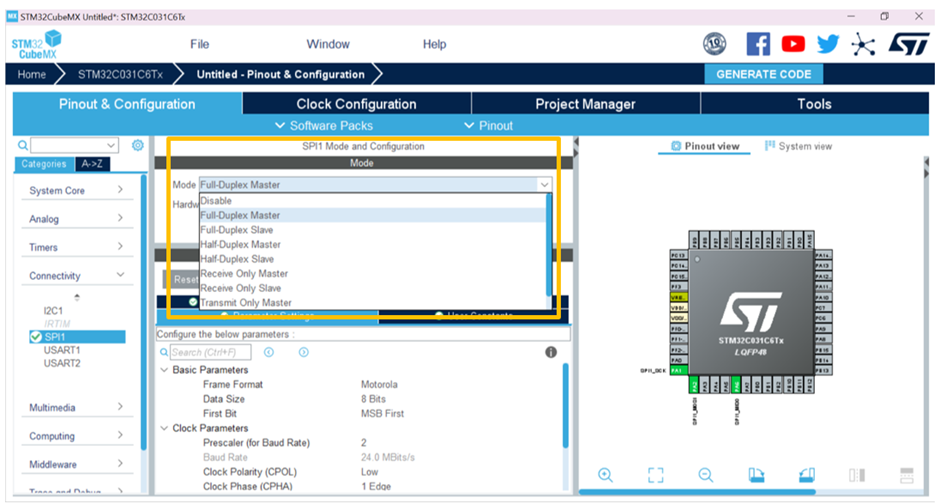
# 摘要
本文旨在为STM32开发新手提供一个全面的入门指南。首先介绍了STM32微控制器及其开发工具uVision5的基本概念和界面布局。随后,详细阐述了如何搭建开发环境,包括安装uVision5,配置开发板和仿真器,以及创建和设置工程。文章第三章讲解了基础代码结构,调试和编译过程,以及如何分析编译错误和警告。第四章重点讲解了使用uVision5调试
组态王报表生成功能深入:函数手册中的报表相关函数使用指南
# 摘要
本文系统地介绍和分析了组态王报表生成功能,首先概述了其基础概念及其在数据展示中的重要性。接着深入探讨了报表相关函数的理论基础,包括各类函数的功能、参数解析以及在数据处理、格式化和输出中的应用。文章还进一步讨论了函数在实践中的应用技巧,特别是在数据提取、处理和报表设计方面。此外,本文还涉及了报表函数的进阶技巧,如高级数据处理、自动化和优化策略,以及故障诊断和问题解决方法。最后,通过行业案
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )