容器网络配置攻略:Docker与Kubernetes中的Linux IP应用
发布时间: 2024-09-27 11:14:12 阅读量: 162 订阅数: 61 

java+sql server项目之科帮网计算机配件报价系统源代码.zip
# 1. 容器网络基础与Linux IP概念
## 1.1 容器网络的重要性
容器技术已迅速成为现代应用程序开发和部署的关键组成部分。随着容器的普及,容器网络作为基础的组件之一,其重要性也日益凸显。容器网络不仅需要支持容器间的通信,还要确保数据的快速、安全传输,以及与外部网络的便捷集成。
## 1.2 Linux IP概念简述
Linux操作系统是容器技术的基石,其IP配置和管理是实现容器网络的基础。在网络层面,IP(Internet Protocol)地址作为网络通信的关键标识,是每个网络节点进行数据包传输和接收的关键。理解Linux IP配置对于优化容器网络和进行故障排查至关重要。
## 1.3 Linux IP命令基础
在Linux环境下,可以通过一系列的IP命令来管理和配置网络接口。基本的IP命令包括`ip addr`用于查看和设置IP地址、`ip route`用于配置路由表等。掌握这些命令是深入理解容器网络架构并进行有效优化的前提条件。接下来的章节,我们将深入探讨Docker和Kubernetes的网络模型,及其在实际应用中的配置和故障处理。
# 2. Docker网络架构详解
### 2.1 Docker网络模型
#### 2.1.1 Docker默认网络模型介绍
Docker默认提供了几种网络驱动,包括bridge、host、overlay、macvlan和none。每种网络驱动都有其独特的用途和配置方式。例如:
- **Bridge**: 默认的网络驱动,用于容器间的通信。在没有指定网络的情况下,Docker会自动创建一个名为 `docker0` 的Linux网桥。
- **Host**: 容器与宿主机共享网络空间。使用这个网络模式时,容器将不具有自己的网络栈。
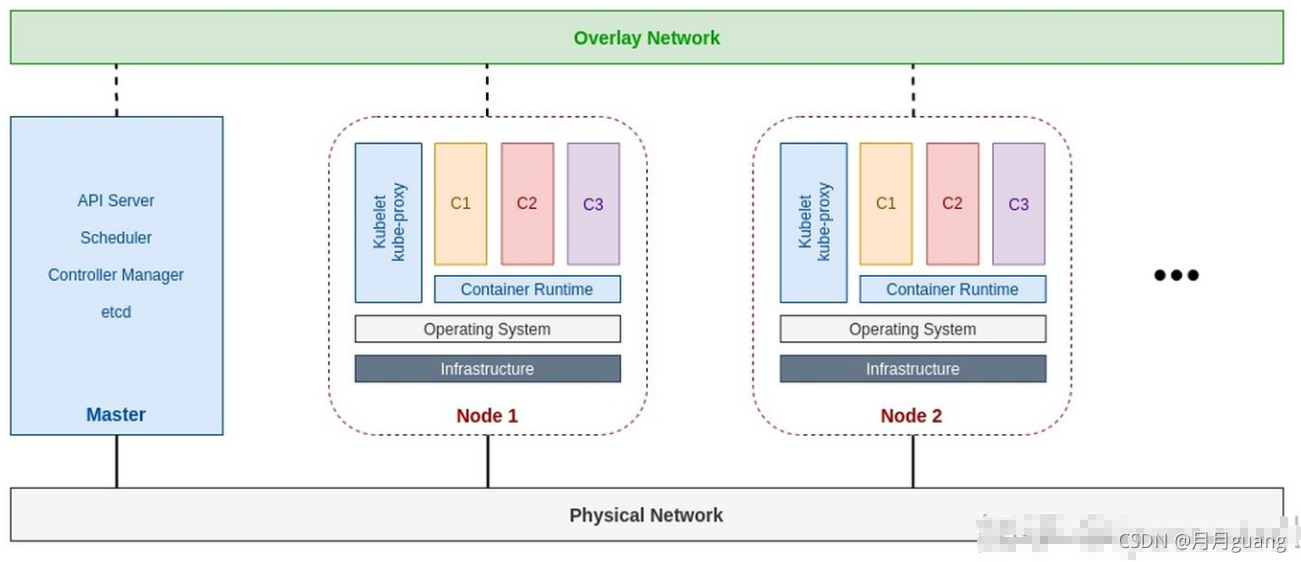
- **Overlay**: 用于跨多个Docker守护进程的容器通信,主要用在Swarm模式中。
- **Macvlan**: 允许容器具备自己的MAC地址,看起来就像物理机直接连接到网络一样。
- **None**: 容器拥有自己的网络命名空间,但是不配置网络,没有外部网络访问。
下面是一个创建自定义bridge网络的命令示例:
```bash
docker network create -d bridge my-bridge-network
```
在此命令中,`-d` 选项指定使用bridge驱动。创建的网络将有一个默认的子网和网关,Docker为容器分配IP地址,容器可以连接到这个网络。
#### 2.1.2 网络插件和驱动机制
除了内置网络驱动外,Docker还支持网络插件来扩展其网络功能。使用插件可以实现更复杂的网络拓扑和配置,如安全隔离、流量控制等。
一个典型的插件使用示例是使用Weave Net插件来创建一个跨多个宿主机的网络,保证容器之间可以跨主机通信。安装并启动插件的命令如下:
```bash
docker plugin install store/weaveworks/weave
docker network create -d weave my-weave-network
```
在这个例子中,`weave` 插件被安装,随后创建了一个名为 `my-weave-network` 的网络,使用了 weave 网络插件。这种网络提供了一个覆盖网络,使得跨宿主机的容器通信成为可能。
### 2.2 Docker网络命令和配置实践
#### 2.2.1 Docker网络管理命令
Docker提供了多种管理网络的命令,以实现对网络的创建、查看、连接和断开、删除等操作。以下是几个核心的Docker网络管理命令:
- `docker network create`: 创建一个新的网络。
- `docker network ls`: 列出所有网络。
- `docker network inspect`: 查看网络的详细信息。
- `docker network connect`: 将容器连接到网络。
- `docker network disconnect`: 将容器从网络断开连接。
- `docker network rm`: 删除一个或多个网络。
例如,查看 `my-bridge-network` 网络的详细信息的命令如下:
```bash
docker network inspect my-bridge-network
```
这个命令会输出一个JSON格式的网络配置信息,包括网络的ID、名称、类型、子网范围、网关、容器连接信息等。
#### 2.2.2 自定义网络配置与实践
在实际应用中,我们可能需要对Docker网络进行自定义配置。这可能包括设置自定义的子网、网关或者DNS等。自定义配置可以通过 `docker network create` 命令的参数来实现,例如:
```bash
docker network create -d bridge \
--subnet ***.**.*.*/16 \
--gateway ***.**.*.* \
--dns *.*.*.* \
my-custom-bridge-network
```
在这个例子中,我们创建了一个自定义的bridge网络,其中包括设置子网为 `***.**.*.*/16`、网关为 `***.**.*.*`,以及DNS服务器为 `*.*.*.*`。
### 2.3 Docker网络故障排查
#### 2.3.1 常见网络问题及排查技巧
在Docker容器环境中,网络问题可能表现为容器间的通信故障、网络延迟、连接超时等。排查这些问题的技巧包括:
- 使用 `docker network inspect` 命令来检查网络配置是否正确。
- 使用 `docker logs` 命令来查看容器的日志信息,从中获取可能的网络错误提示。
- 使用 `ping` 命令来测试容器之间的网络连通性。
- 检查防火墙和安全组规则,确保它们没有阻止容器之间的网络流量。
下面是一个使用 `ping` 测试两个容器间连通性的示例

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**Linux IP 命令专栏简介**
本专栏深入探讨 Linux IP 命令,为 Linux 系统管理员提供全面的指南。从基础的 IP 地址管理到高级的路由配置和故障排除,本专栏涵盖了广泛的主题。
通过自动化脚本,您将了解如何简化繁琐的 IP 配置任务。您还将掌握策略路由技术,以优化网络性能并提高故障排除效率。此外,本专栏还提供有关编写 IP 命令脚本的实用指南,让您能够自动化日常管理任务,节省时间并提高效率。
无论是 Linux 新手还是经验丰富的管理员,本专栏都将为您提供必要的知识和技能,以充分利用 Linux IP 命令,有效管理您的 Linux 系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
软硬件对接秘籍:如何让微机原理与接口技术无缝协作
# 摘要
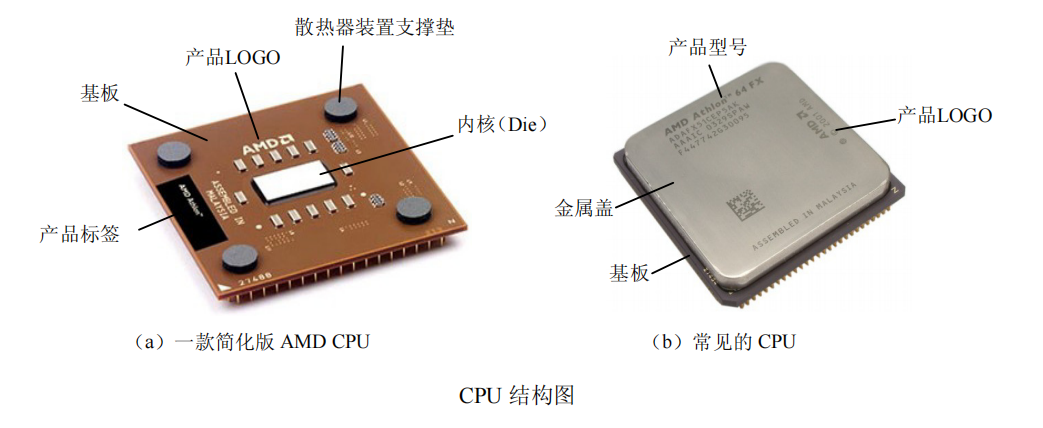
本文全面介绍了微机原理与接口技术,从微处理器工作原理、存储系统、输入输出系统设计到接口技术详解及软硬件对接的理论与实践技巧进行了深入探讨。文中不仅解释了微机硬件基础,如CPU内部结构和存储管理,还阐述了标准接口技术的应用、特殊接口技术的实现。此外,本文探讨了软硬件对接的理论基础,包括协同设计原理、中断系统、D
肌电信号处理中的MVC标准化挑战:8个问题分析与立竿见影的解决策略

# 摘要
本文系统性地探讨了肌电信号处理的理论与实践,重点分析了MVC模型在肌电信号分析中的应用,并对其标准化挑战进行了深入讨论。文中提出并分析了数据采集、数据处理流程、个体差异性及实时处理和反馈等关键问题,并针对这些挑战提供了相应的解决策略。通过硬件标准化、软件算法改进、跨平台数据融合技术、个体差异性补偿技术等实践案例,展示了解
【数字逻辑设计优化】:16位加法器的进位预估与性能提升策略
# 摘要
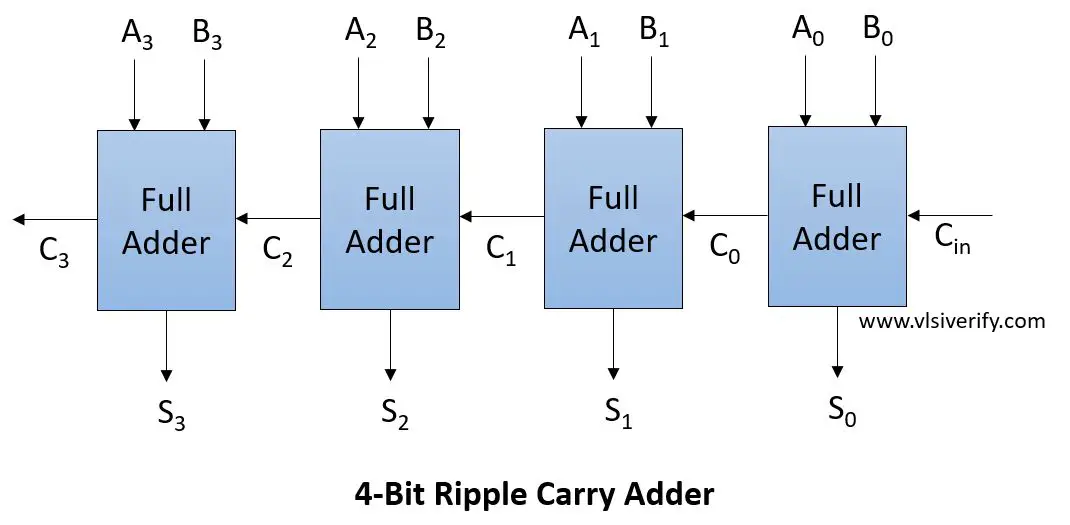
本文对数字逻辑设计中的16位加法器进行了深入研究,包括基本概念介绍、进位预估机制分析、设计优化方法探讨,以及性能提升实践的案例分析。文章首先概述了数字逻辑设计的基本概念,并简要介绍了16位加法器。随后,详细分析了进位预估机制,包括串行与并行进位的比较、先进进位技术,以及高级进位预估算法的原理与性能。第三章探讨了16位加法器的设计优化,涵盖电路优化技术、时序优化和面积优化策
【PCIe IP核心建造术】:在FPGA上打造高性能PCIe接口
# 摘要
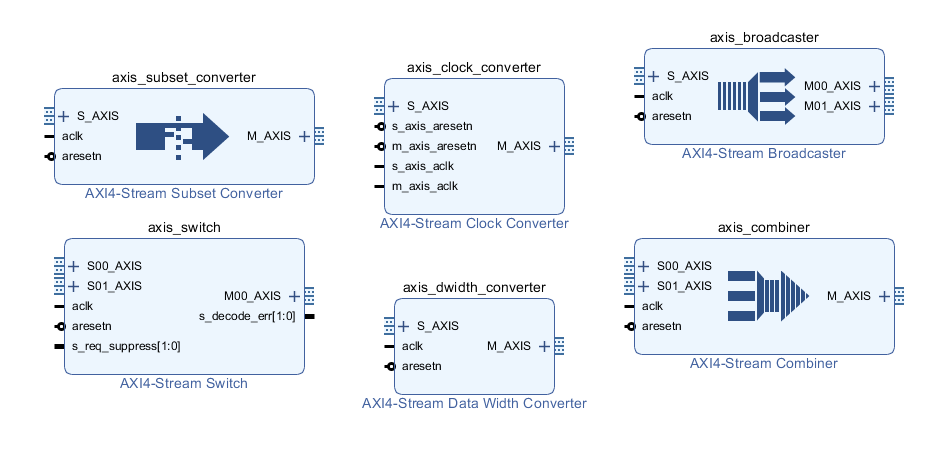
PCIe技术作为高带宽、低延迟的计算机总线技术,在现代计算机架构中扮演着关键角色。本文从PCIe技术的基本概念出发,详细介绍了FPGA平台与PCIe IP核心的集成,包括FPGA的选择、PCIe IP核心的架构与优化。随后,文章探讨了PCI
ISA88.01批量控制安全管理:打造零事故生产环境的7个步骤

# 摘要
ISA88.01批量控制安全管理是确保生产过程中安全和效率的关键。本文首先介绍了批量控制与安全管理体系的基本概念及其重要性,然后探讨了结合两者以实现零事故生产环境的策略和实
【PCIe 5.0物理层详解】:高速信号完整性问题及最佳解决方案
# 摘要
PCI Express (PCIe) 5.0作为最新的高速串行计算机扩展总线标准,提供了比前代标准更高的数据传输速率。本文系统性地介绍了PCIe 5.0物理层的基础理论、高速信号完整性问题,以及信号完整性优化技术,并通过实践应用案例展示了这些技术的实际效用。进一步探讨了该技术未来的发展趋势、物理层面临的挑战和机遇,以及未来深入研究的方向。文章旨在为设计和优化高速PCB设计工程师提供理论基础和实践经验,促进PCIe 5.0技术的应用和推广。
# 关键字
PCIe 5.0;信号完整性;物理层设计;优化技术;高速数据传输;系统集成
参考资源链接:[PCI Express Base Sp
三菱FX3U PLC与HMI交互:打造直觉操作界面的秘籍
# 摘要
本论文详细介绍了三菱FX3U PLC与HMI的基本概念、工作原理及高级功能,并深入探讨了HMI操作界面的设计原则和高级交互功能。通过对三菱FX3U PLC的编程基础与高级功能的分析,本文提供了一系列软件集成、硬件配置和系统测试的实践案例,以及相应的故障排除方法。此外,本文还分享了在不同行业应用中的案例研究,并对可能出现的常见问题提出了具体的解决策略。最后,展望了新兴技术对PLC和HMI
CMW100 WLAN故障快速诊断手册:立即解决网络难题
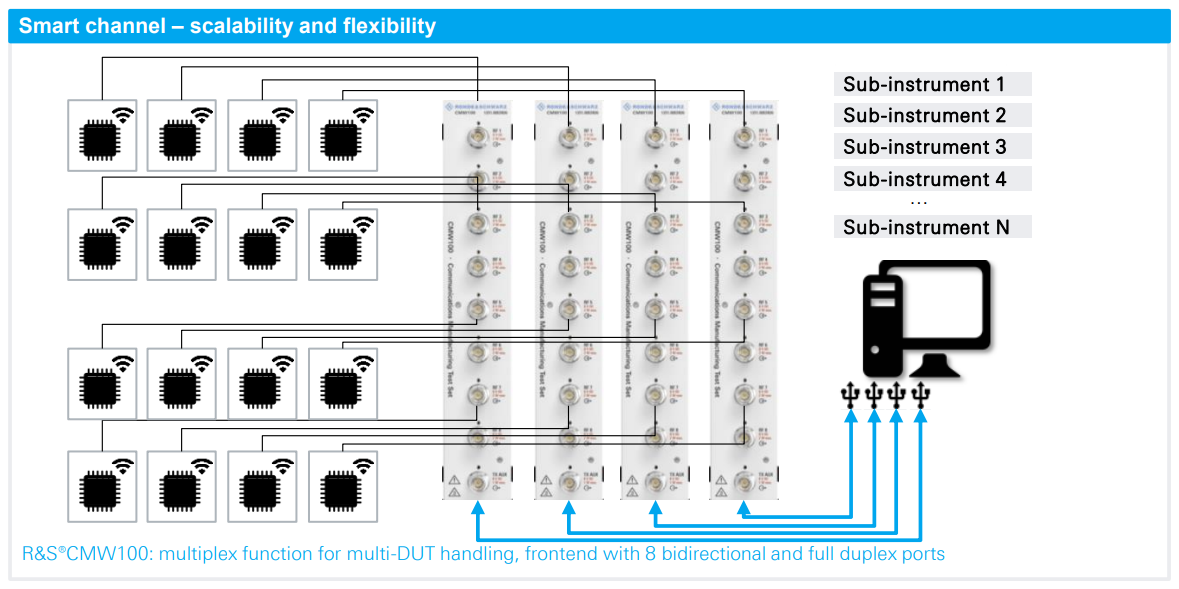
# 摘要
随着无线局域网(WLAN)技术的广泛应用,网络故障诊断成为确保网络稳定性和性能的关键环节。本文深入探讨了WLAN故障诊断的基础知识,网络故障的理论,以及使用CMW100这一先进的诊断工具进行故障排除的具体案例。通过理解不同类型的WLAN故障,如信号强度问题、接入限制和网络配置错误,并应用故障诊断的基本原则和工具,本文提供了对网络故障分析和解决过程的全面视角。文章详细介绍了CMW100的功能、特点及在实战中如何应对无线信号覆盖问题、客户端接入问题和网络安全漏
【均匀线阵方向图秘籍】:20个参数调整最佳实践指南
# 摘要
均匀线阵方向图是无线通信和雷达系统中的核心技术之一,其设计和优化对系统的性能至关重要。本文系统性地介绍了均匀线阵方向图的基础知识,理论基础,实践技巧以及优化工具与方法。通过理论与实际案例的结合,分析了线阵的基本概念、方向图特性、理论参数及其影响因素,并提出了方向图参数调整的多种实践技巧。同时,本文探讨了仿真软件和实验测量在方向图优化中的应用,并介绍了最新的优化算法工具。最后,展望了均匀线阵方向图技术的发展趋势,包括新型材料和技术的应用、智能化自适应方向图的研究,以及面临的技术挑战与潜在解决方案。
# 关键字
均匀线阵;方向图特性;参数调整;仿真软件;优化算法;技术挑战
参考资源链
【深入探索Canvas API】:避免Base64转换时透明度丢失的关键策略
# 摘要
本文探讨了Canvas API及其与Base64编码结合应用的基础知识,分析了在图像处理中透明度信息丢失的问题及其对图像质量的影响。为了减少透明度丢失,文中详细讨论了正确处理Canvas像素数据和Base64编码时保持透明度的技术策略。通过实战演练,展示了高质量图像Base64编码的实现步骤和效果展示,并提供了多种编码策略的对比
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )