高级故障排除技巧:TLE5012B系统集成挑战全攻略
发布时间: 2025-01-10 02:54:18 阅读量: 7 订阅数: 6 

TLE5012B.zip_5012B_TLE5012B CSQ_tle5012b_tle5012b测速
# 摘要
本文系统性地概述了TLE5012B系统的集成过程,包括理论准备、实践步骤、故障排除以及高级应用技巧。首先介绍了TLE5012B系统的理论基础、架构以及与外部设备的交互方式。接着,阐述了集成过程中的关键参数设置和配置文件的管理方法。实践中,本文详细说明了硬件和软件集成的步骤、注意事项和故障诊断技巧。针对可能出现的问题,本文还提供了故障排除的策略,并探讨了系统性能优化、安全性和稳定性保障的方法。最后,通过案例分析,分享了成功的集成经验和故障排除的实际应用,为相关领域的工程师提供了宝贵的参考和指导。
# 关键字
TLE5012B系统;系统集成;硬件集成;软件配置;故障排除;性能优化
参考资源链接:[Infineon TLE5012B:非接触式编码器磁性角度传感器数据手册](https://wenku.csdn.net/doc/4m5vnc6mqq?spm=1055.2635.3001.10343)
# 1. TLE5012B系统集成概述
在当今技术迅猛发展的时代,系统集成变得尤为重要。TLE5012B,作为一种先进的传感器系统,其集成对于提升产品性能与功能具有重大意义。本章将为您简要介绍TLE5012B系统集成的基本概念和重要性,为后续章节的深入探讨做铺垫。
## 系统集成的意义
系统集成是将各种技术、软件、硬件和网络资源融合在一起,以实现特定业务目标的过程。对于TLE5012B系统而言,集成不仅意味着硬件连接的物理结合,也包括软件配置、通信协议的统一和数据处理流程的优化。这可以显著提高系统的整体性能和可靠性。
## TLE5012B集成的挑战
尽管TLE5012B系统在多个行业中有着广泛的应用,但在集成过程中仍然面临诸多挑战。这些挑战包括但不限于设备兼容性、数据同步、实时性能和成本控制等。理解这些挑战并提前做出规划,是成功集成的第一步。
## TLE5012B集成的目标
成功集成TLE5012B系统的目标是确保系统能够无缝地运行,提供稳定和精确的数据,以满足特定业务的需求。此外,优化用户体验和确保系统的长期可持续性也是不可或缺的目标。
通过本章的介绍,您已经对TLE5012B系统集成有了初步的了解。接下来的章节将深入探讨理论准备、实践步骤以及故障排除等关键环节,以帮助您在实际操作中达到预期的集成效果。
# 2. TLE5012B系统集成前的理论准备
## 2.1 TLE5012B系统的基本原理和架构
### 2.1.1 系统组成和工作原理
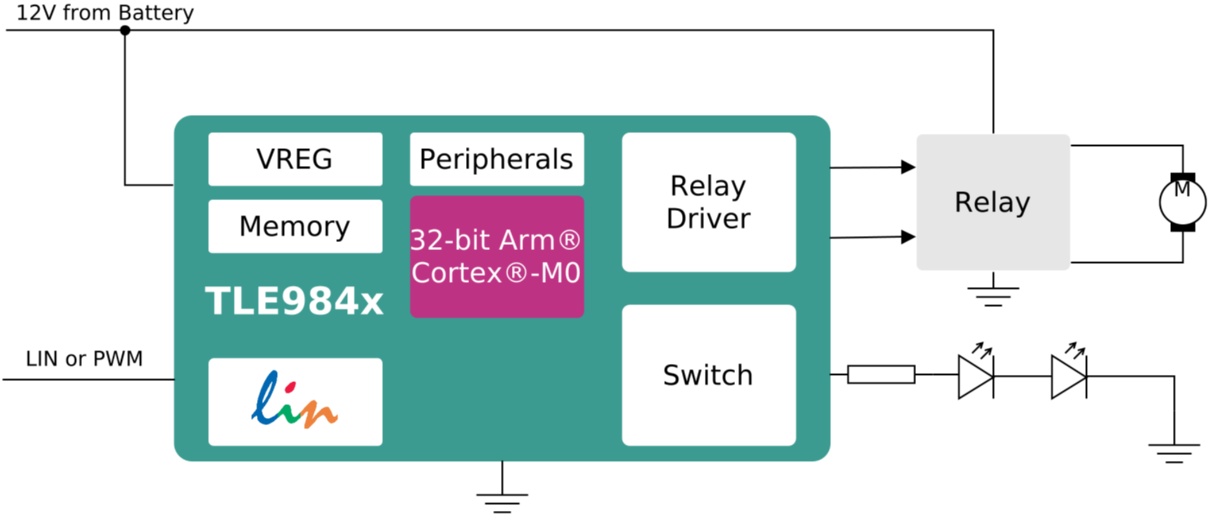
TLE5012B系统是一个高度集成的磁旋转位置传感器系统,广泛应用于汽车和工业领域。该系统主要由磁场发生器、磁敏感芯片以及数字信号处理单元组成。
磁场发生器通常为一个永磁体,被安装在旋转轴上,与被测对象同步旋转。磁敏感芯片基于磁阻效应,能够探测到由磁场发生器产生的磁场变化,并将其转换为电信号。数字信号处理单元则负责接收这些电信号,通过复杂的算法处理,最终输出位置和旋转角度等信息。
工作原理上,当被测对象旋转时,永磁体磁场随着改变方向和强度。磁敏感芯片将探测到的磁场变化转换成模拟信号,经过模拟-数字转换器(ADC)处理后,得到数字信号。信号处理单元通过算法对这些数字信号进行解码,从而获得精确的位置信息。
### 2.1.2 系统与外部设备的交互方式
TLE5012B系统与外部设备的交互主要通过以下三种方式进行:
- **模拟输出**:系统可以提供模拟电压或电流输出,例如线性模拟输出,可根据磁旋转位置产生相应的模拟电压或电流信号。
- **数字接口输出**:通过SPI或SENT等数字接口,系统可输出精确的数字位置信息,能够直接与微控制器或其他数字处理系统通信。
- **频率输出**:TLE5012B系统能够输出方波信号,其频率与旋转速度成正比,适用于不需要高精度位置信息,而是需要速度信息的场合。
为了实现更高效的数据交互,系统可能还会包括内置的诊断功能和错误检测机制,以确保数据的可靠性。当系统集成到更复杂的设备或系统中时,这些通信方式和功能特性是至关重要的。
## 2.2 TLE5012B系统集成中的关键参数和配置
### 2.2.1 参数设置的标准和意义
在集成TLE5012B系统之前,需要了解和设置多个关键参数,这些参数对于系统性能和应用场合适应性至关重要。其中包括:
- **磁旋转角度范围**:需要根据实际应用场景设置TLE5012B可检测的最大和最小角度。
- **零位偏移**:零位是指旋转轴在初始位置时的角度。这个参数需要校准,以确保角度测量的准确性。
- **灵敏度和线性度**:灵敏度决定了系统对磁场变化的响应度,而线性度则确保了整个检测范围内的输出信号和位置成线性关系。
在设置这些参数时,通常需要参考TLE5012B的数据手册,结合具体应用场景的物理条件和性能要求,通过实验和测试来完成最终参数的确定。
### 2.2.2 配置文件的创建和修改方法
对于TLE5012B系统的参数配置,可以通过软件接口或专用工具来实现。配置文件通常是一个或多个包含参数信息的文件,包含了系统的各种设置。
创建和修改配置文件通常需要遵循以下步骤:
1. **读取默认配置**:首先从TLE5012B中获取当前配置的默认值。
2. **编辑配置参数**:在专用的软件界面中,用户可以修改相关的配置参数,如角度范围、零位偏移等。
3. **验证和保存配置**:修改后的配置需要进行验证,确保无误后保存到配置文件中。
4. **配置下载**:将配置文件通过适当的接口下载到TLE5012B中,完成参数设置。
在这一过程中,软件工具通常会提供参数验证功能,以防止错误配置。此外,配置文件应定期备份,以便在需要时能够恢复到之前的设置。
```markdown
| 参数名称 | 描述 | 默认值 | 范围 |
| -------------- | -------------------------------- | ------ | ----------- |
| Angle Range | 可检测的磁旋转角度范围 | 0-360° | 0-360° |
| Zero Offset | 零位偏移,旋转轴初始位置的角度值 | 0° | -180°到180° |
| Sensitivity | 灵敏度设置 | 100% | 50%-200% |
| Linearity | 线性度校正 | 1.0 | 0.9-1.1 |
```
通过上述表格和描述,我们可以看到TLE5012B系统的配置参数的定义和取值范围,以及它们对于系统集成和应用的重要性。
在下一小节中,我们将继续深入探讨TLE5012B系统集成的具体实践步骤。
# 3. TLE5012B系统集成的实践步骤
## 3.1 硬件集成和连接指南
### 3.1.1 硬件安装流程和注意事项
集成TLE5012B系统开始之前,确保所有硬件组件都已到货,并检查包装是否有损坏迹象。在开始硬件安装之前,务必阅读并理解了硬件组件的技术手册,以便正确进行安装。
步骤 1:拆封硬件组件,并按照清单检查所有部件是否齐全。若发现部件缺失或损坏,立即联系供应商。
步骤 2:清理安装区域,确保无尘埃、水和其他杂物。在安装敏感元件前,特别要注意手部的静电放电。
步骤 3:根据提供的布局图和指南,将TLE5012B传感器固定至指定位置,使用正确的螺丝和工具。
步骤 4:连接传感器与控制单元。使用手册推荐的电缆和接头类型。连接时要确保电缆没有打折或过度弯曲。
步骤 5:当所有硬件组件连接完成,开启电源进行初始测试。确保系统的所有指示灯显示正常,无异常响声或热量产生。
注意事项:
- 避免在

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《TLE5012B.PDF》专栏深入探讨了 TLE5012B 芯片的方方面面,包括其特性、常见问题、应用、故障排除、性能优化、与竞品的比较、维护策略、编程技巧、应用案例、调试经验、信号完整性问题、环境适应性、高频应用技巧和可靠性提升。专栏文章由专家撰写,涵盖了技术深度和广度,为专业人士提供了全面且实用的 TLE5012B 指南。通过阅读本专栏,读者可以深入了解 TLE5012B 芯片,解决技术挑战,优化性能,并确保其在各种应用中的可靠性和有效性。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Ubuntu18.04启动故障诊断】:根除紫屏卡死的10大策略

# 摘要
本文旨在深入探讨VC++中颜色自定义的基础知识及其高级技术应用,并分析传统方法与未来趋势。首先介绍颜色自定义的基础,包括系统预定义颜色的使用、手动定义RGB颜色值,以及调色板管理技术。随后,文章转向高级技术,探索通过颜色方案文件、主题外观以及Direct2D进行颜色管理的方法。第四章讨论颜色自定义在实际项目中的应用,如界面美化、性能优化和适配不同显示环境。最后,文
【揭秘400G_800G光模块】:快速掌握QSFP-DD技术的10大关键点

# 摘要
QSFP-DD技术作为新一代高性能光模块技术,在数据传输速度和设备集成度方面表现出色。本文首先概述了QSFP-DD的技术特点和市场应用前景。随后,深入探讨了其物理结构和电气特性,重点分析了热管理设计和电气接口规范对性能的影响。在高速数据传输方面,文章着重讨论了400G/800G传输标准下的PAM4调制技术及多路复用技术,并探讨了传输性能优化策略。兼容性与互操作性章节分析
【算法揭秘】:掌握这些技巧,让你的Medium内容获得更多曝光
# 摘要
本文旨在探讨算法在内容分发和优化中的关键作用,以及如何通过理解和应用算法原理来提升Medium平台上的文章质量和曝光度。首先,文章介绍了算法的基本概念和重要性,强调了算法核心理念和设计策略,包括其效率和复杂度分析。随后,文章转向内容优化策略,涵盖了读者群定位、文章质量和可读性的提升以及SEO最佳实践。在内容分发章节中,本文详
工业自动化通信挑战:IBA与S7-300集成案例的10大策略

# 摘要
工业自动化中,高效可靠的通信协议是实现设备间交互的关键。IBA(Industrial Broadband Alliance)通信协议作为一项新兴技术,具备其独特的定义和特点,尤其在自动化领域的应用中显得尤为重要。本文首先介绍了IBA通信协议的核心概念、系统架构以及数据传输模型。接着,深入探讨了S7-300 PLC与IBA集成的原理,包括技术简介、集成
【深度学习实战攻略】:从入门到精通的GitHub项目案例

# 摘要
随着人工智能的快速发展,深度学习已成为推动其进步的关键技术。本文全面介绍了深度学习的实战技巧、理论基础、开发工具和框架,并通过GitHub项目案例分析,展示了深度学习在图像识别、自然语言处理和强化学习领域的应
【3525逆变器全方位故障诊断手册】:6步快速定位与维修

# 摘要
逆变器作为电力系统中将直流电转换为交流电的关键设备,其稳定运行对整个电力系统的可靠性至关重要。本文首先概述
OSLO语言全解析:掌握语法、语义与在实际编程中的应用

# 摘要
本文全面介绍了一种名为OSLO的编程语言,从基础语法到高级特性,再到并发编程以及在实际项目中的应用,系统地剖析了该语言的核心概念和功能。通过深入分析OSLO语言的基本元素、数据类型、控制流程语句、函数、模块化编程、异常处理、内存管理、类与对象的实现,本文为读者提供了理解OSLO语言结构和操作的基础。此外,文章还探讨了OSLO语言在
【TCU故障诊断手册】:快速定位与解决常见标定问题
# 摘要
随着车辆技术的快速发展,TCU(Transmission Control Unit,变速器控制单元)作为关键的电子控制单元,其故障诊断显得尤为重要。本文首先介绍了TCU的硬件组成和软件架构,进而深入探讨了故障诊断的理论框架、故障定位方法以及故障恢复与预防策略。通过分析实践案例,本文提供了详细的故障案例分析、故障诊断操作指导以及改进建议。此外,本文还探讨了TCU标定工具的
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )