OpenCV图像处理性能优化:外接最小矩形计算与轮廓分析,让你的图像处理更流畅
发布时间: 2024-08-11 14:44:33 阅读量: 41 订阅数: 21 

根据最小外接矩形放平_计算旋转角_二值图像旋转至水平_最小外接矩形你和_
# 1. OpenCV图像处理简介
OpenCV(Open Source Computer Vision Library)是一个开源计算机视觉库,广泛用于图像处理、视频分析和计算机视觉任务。它提供了一系列算法和函数,用于图像增强、特征提取、物体检测和跟踪。OpenCV的优势在于其跨平台兼容性、广泛的社区支持以及丰富的文档。
该库的图像处理功能包括图像读取和写入、图像转换、几何变换、滤波、形态学操作和图像分割。OpenCV还支持高级功能,如人脸检测、物体识别和运动分析。
# 2. 外接最小矩形计算优化
### 2.1 理论基础:外接最小矩形算法
外接最小矩形(MBR)是包围一组点的最小矩形,用于图像处理中表示对象的边界或形状。计算 MBR 的算法有多种,其中最常用的是 **旋转卡壳算法**。
旋转卡壳算法基于凸包的概念,凸包是一个包含给定点集的所有点的最小凸多边形。算法通过以下步骤计算 MBR:
1. **计算凸包:**使用 Graham 扫描算法或 Jarvis 算法计算给定点集的凸包。
2. **旋转凸包:**将凸包按顺时针或逆时针方向旋转,直到找到与 x 轴或 y 轴平行的边。
3. **计算 MBR:**旋转后的凸包的平行边形成 MBR 的两条边,而其他两条边由凸包的端点确定。
### 2.2 实践应用:算法实现和性能分析
#### 2.2.1 算法实现
以下是用 C++ 实现的旋转卡壳算法:
```cpp
#include <vector>
#include <algorithm>
using namespace std;
struct Point {
int x, y;
};
// 比较函数,按 x 坐标从小到大排序
bool compareX(const Point& p1, const Point& p2) {
return p1.x < p2.x;
}
// 比较函数,按 y 坐标从小到大排序
bool compareY(const Point& p1, const Point& p2) {
return p1.y < p2.y;
}
// 计算凸包
vector<Point> convexHull(vector<Point>& points) {
// 按 x 坐标排序
sort(points.begin(), points.end(), compareX);
// 按 y 坐标排序
sort(points.begin(), points.end(), compareY);
vector<Point> hull;
// 添加左下角点
hull.push_back(points[0]);
// 添加右上角点
hull.push_back(points[points.size() - 1]);
// 旋转凸包
int n = points.size();
for (int i = 1; i < n - 1; i++) {
while (hull.size() >= 2 &&
(hull[hull.size() - 2].x - hull[hull.size() - 1].x) *
(points[i].y - hull[hull.size() - 1].y) -
(hull[hull.size() - 2].y - hull[hull.size() - 1].y) *
(points[i].x - hull[hull.size() - 1].x) > 0) {
hull.pop_back();
}
hull.push_back(points[i]);
}
return hull;
}
// 计算外接最小矩形
Rect boundingRect(vector<Point>& points) {
// 计算凸包
vector<Point> hull = convexHull(points);
// 旋转凸包
int n = hull.size();
for (int i = 0; i < n; i++) {
int j = (i + 1) % n;
if (hull[j].x ==
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以 OpenCV 轮廓外接最小矩形为主题,深入探讨图像形状分析的核心技术。从理论基础到实战应用,专栏涵盖了外接最小矩形计算的原理、算法实现、应用场景和优化技巧。通过一系列循序渐进的教程,读者将掌握轮廓分析的精髓,提升图像处理水平,解锁图像识别和分析的新境界。专栏内容全面且实用,适用于图像处理工程师、计算机视觉研究人员以及对图像分析感兴趣的开发者。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【51单片机数字时钟案例分析】:深入理解中断管理与时间更新机制
# 摘要
本文详细探讨了基于51单片机的数字时钟设计与实现。首先介绍了数字时钟的基本概念、功能以及51单片机的技术背景和应用领域。接着,深入分析了中断管理机制,包括中断系统原理、51单片机中断系统详解以及中断管理在实际应用中的实践。本文还探讨了时间更新机制的实现,阐述了基础概念、在51单片机下的具体策略以及优化实践。在数字时钟编程与调试章节中,讨论了软件设计、关键功能实现以及调试
【版本升级无忧】:宝元LNC软件平滑升级关键步骤大公开!

# 摘要
宝元LNC软件的平滑升级是确保服务连续性与高效性的关键过程,涉及对升级需求的全面分析、环境与依赖的严格检查,以及升级风险的仔细评估。本文对宝元LNC软件的升级实践进行了系统性概述,并深入探讨了软件升级的理论基础,包括升级策略
【异步处理在微信小程序支付回调中的应用】:C#技术深度剖析
# 摘要
本文首先概述了异步处理与微信小程序支付回调的基本概念,随后深入探讨了C#中异步编程的基础知识,包括其概念、关键技术以及错误处理方法。文章接着详细分析了微信小程序支付回调的机制,阐述了其安全性和数据交互细节,并讨论了异步处理在提升支付系统性能方面的必要性。重点介绍了如何在C#中实现微信支付的异步回调,包括服务构建、性能优化、异常处理和日志记录的最佳实践。最后,通过案例研究,本文分析了构建异步支付回调系统的架构设计、优化策略和未来挑战,为开
内存泄漏不再怕:手把手教你从新手到专家的内存管理技巧
# 摘要
内存泄漏是影响程序性能和稳定性的关键因素,本文旨在深入探讨内存泄漏的原理及影响,并提供检测、诊断和防御策略。首先介绍内存泄漏的基本概念、类型及其对程序性能和稳定性的影响。随后,文章详细探讨了检测内存泄漏的工具和方法,并通过案例展示了诊断过程。在防御策略方面,本文强调编写内存安全的代码,使用智能指针和内存池等技术,以及探讨了优化内存管理策略,包括内存分配和释放的优化以及内存压缩技术的应用。本文不
反激开关电源的挑战与解决方案:RCD吸收电路的重要性
# 摘要
本文系统探讨了反激开关电源的工作原理及RCD吸收电路的重要作用和优势。通过分析RCD吸收电路的理论基础、设计要点和性能测试,深入理解其在电压尖峰抑制、效率优化以及电磁兼容性提升方面的作用。文中还对RCD吸收电路的优化策略和创新设计进行了详细讨论,并通过案例研究展示其在不同应用中的有效性和成效。最后,文章展望了RCD吸收电路在新材料应用
【Android设备标识指南】:掌握IMEI码的正确获取与隐私合规性

# 摘要
IMEI码作为Android设备的唯一标识符,不仅保证了设备的唯一性,还与设备的安全性和隐私保护密切相关。本文首先对IMEI码的概念及其重要性进行了概述,然后详细介绍了获取IMEI码的理论基础和技术原理,包括在不同Android版本下的实践指南和高级处理技巧。文中还讨论了IMEI码的隐私合规性考量和滥用防范策略,并通过案例分析展示了IMEI码在实际应用中的场景。最后,本文探讨了隐私保护技术的发展趋势以及对开发者在合规性
E5071C射频故障诊断大剖析:案例分析与排查流程(故障不再难)

# 摘要
本文对E5071C射频故障诊断进行了全面的概述和深入的分析。首先介绍了射频技术的基础理论和故
【APK网络优化】:减少数据消耗,提升网络效率的专业建议

# 摘要
随着移动应用的普及,APK网络优化已成为提升用户体验的关键。本文综述了APK网络优化的基本概念,探讨了影响网络数据消耗的理论基础,包括数据传输机制、网络请求效率和数据压缩技术。通过实践技巧的讨论,如减少和合并网络请求、服务器端数据优化以及图片资源管理,进一步深入到高级优化策略,如数据同步、差异更新、延迟加载和智能路由选择。最后,通过案例分析展示了优化策略的实际效果,并对5G技
DirectExcel数据校验与清洗:最佳实践快速入门
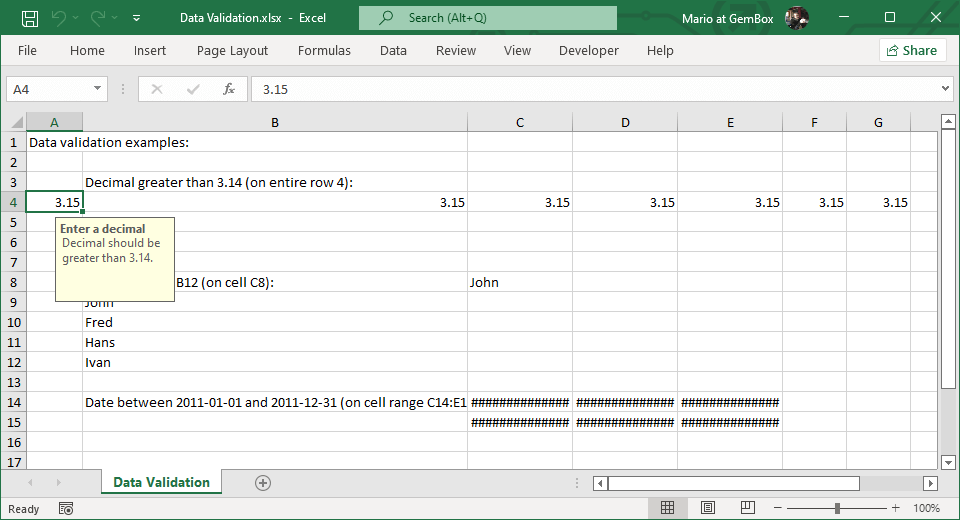
# 摘要
本文旨在介绍DirectExcel在数据校验与清洗中的应用,以及如何高效地进行数据质量管理。文章首先概述了数据校验与清洗的重要性,并分析了其在数据处理中的作用。随后,文章详细阐述了数据校验和清洗的理论基础、核心概念和方法,包括校验规则设计原则、数据校验技术与工具的选择与应用。在实践操作章节中,本文展示了DirectExcel的界面布局、功能模块以及如何创建
【模糊控制规则优化算法】:提升实时性能的关键技术
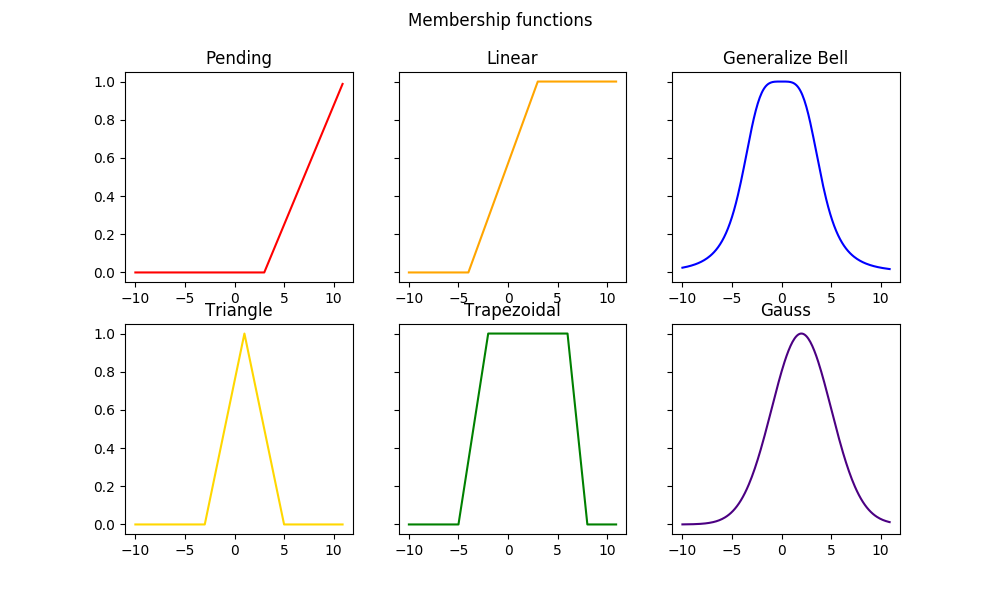
# 摘要
模糊控制规则优化算法是提升控制系统性能的重要研究方向,涵盖了理论基础、性能指标、优化方法、实时性能分析及提升策略和挑战与展望。本文首先对模糊控制及其理论基础进行了概述,随后详细介绍了基于不同算法对模糊控制规则进行优化的技术,包括自动优化方法和实时性能的改进策略。进一步,文章分析了优化对实时性能的影响,并探索了算法面临的挑战与未
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )