旋转与变换:MATLAB三维矩阵视角转换,深入理解数据奥秘
发布时间: 2024-06-10 15:05:34 阅读量: 123 订阅数: 80 

《COMSOL顺层钻孔瓦斯抽采实践案例分析与技术探讨》,COMSOL模拟技术在顺层钻孔瓦斯抽采案例中的应用研究与实践,comsol顺层钻孔瓦斯抽采案例 ,comsol;顺层钻孔;瓦斯抽采;案例,COM

# 1. MATLAB三维矩阵视角转换概述
MATLAB中三维矩阵视角转换是一种强大的工具,允许用户以交互方式探索和操作三维数据。它涉及使用矩阵变换来改变观察者相对于三维场景的视角。通过应用旋转、平移和缩放等变换,用户可以从不同的角度查看和分析数据,从而获得更深入的见解。
视角转换在各种应用中至关重要,包括三维建模、计算机视觉和数据可视化。它使研究人员和工程师能够从多个角度检查复杂的数据集,识别模式并做出明智的决策。MATLAB提供了广泛的函数和工具,简化了视角转换过程,使开发人员能够轻松创建交互式三维可视化。
# 2.1 旋转矩阵与变换矩阵
### 旋转矩阵
旋转矩阵是一种特殊的正交矩阵,用于表示三维空间中的旋转变换。它由以下公式定义:
```
R = [cos(θ) -sin(θ) 0]
[sin(θ) cos(θ) 0]
[0 0 1]
```
其中,θ 是绕 z 轴的旋转角度。
### 变换矩阵
变换矩阵是一个 4x4 矩阵,用于表示三维空间中的平移、旋转和缩放变换。它由以下公式定义:
```
T = [R t]
[0 1]
```
其中,R 是旋转矩阵,t 是平移向量。
### 旋转矩阵与变换矩阵的关系
旋转矩阵是变换矩阵的一部分,它表示变换矩阵中的旋转部分。变换矩阵还可以表示平移,而旋转矩阵不能。
### 参数说明
* **θ:**绕 z 轴的旋转角度(弧度)
* **t:**平移向量,表示沿 x、y、z 轴的平移量
### 代码逻辑分析
```python
import numpy as np
# 绕 z 轴旋转 θ 角度的旋转矩阵
def rotation_matrix(theta):
R = np.array([[np.cos(theta), -np.sin(theta), 0],
[np.sin(theta), np.cos(theta), 0],
[0, 0, 1]])
return R
# 平移变换矩阵
def translation_matrix(tx, ty, tz):
T = np.array([[1, 0, 0, tx],
[0, 1, 0, ty],
[0, 0, 1, tz],
[0, 0, 0, 1]])
return T
```
# 3. 实践应用
### 3.1 绕坐标轴旋转
#### 绕 X 轴旋转
绕 X 轴旋转的变换矩阵为:
```matlab
Rx = [1, 0, 0, 0;
0, cos(theta), -sin(theta), 0;
0, sin(theta), cos(theta), 0;
0, 0, 0, 1];
```
其中,`theta` 为旋转角度

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《MATLAB三维矩阵》专栏深入探讨了三维矩阵在数据处理和科学计算中的广泛应用。从基础概念到高级技巧,专栏涵盖了三维矩阵操作、索引、可视化、切片、旋转、图像处理、计算机视觉、科学计算、性能优化、并行计算、跨语言互操作、数据结构、算法设计、错误处理、高级技巧、深度学习、数据挖掘、工具箱集成和生物信息学应用等方面。通过深入浅出的讲解和丰富的示例,专栏旨在帮助读者掌握三维矩阵处理的精髓,提升数据处理效率,并为解决复杂问题提供强大的工具。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
解决组合分配难题:偏好单调性神经网络实战指南(专家系统协同)

# 摘要
本文旨在探讨解决组合分配难题的方法,重点关注偏好单调性理论在优化中的应用以及神经网络的实战应用。文章首先介绍了偏好单调性的定义、性质及其在组合优化中的作用,接着深入探讨了如何
WINDLX模拟器案例研究:3个真实世界的网络问题及解决方案
# 摘要
本文对WINDLX模拟器进行了全面概述,并深入探讨了网络问题的理论基础与诊断方法。通过对比OSI七层模型和TCP/IP模型,分析了网络通信中常见的问题及其分类。文中详细介绍了网络故障诊断技术,并通过案例分析方法展示了理论知识在实践中的应用。三个具体案例分别涉及跨网络性能瓶颈、虚拟网络隔离失败以及模拟器内网络服务崩溃的背景、问题诊断、解决方案实施和结果评估。最后,本文展望了W
【FREERTOS在视频处理中的力量】:角色、挑战及解决方案

# 摘要
FreeRTOS在视频处理领域的应用日益广泛,它在满足实时性能、内存和存储限制、以及并发与同步问题方面面临一系列挑战。本文探讨了FreeRTOS如何在视频处理中扮演关键角色,分析了其在高优先级任务处理和资源消耗方面的表现。文章详细讨论了任务调度优化、内存管理策略以及外设驱动与中断管理的解决方案,并通过案例分析了监控视频流处理、实时视频转码
ITIL V4 Foundation题库精讲:考试难点逐一击破(备考专家深度剖析)
# 摘要
ITIL V4 Foundation作为信息技术服务管理领域的重要认证,对从业者在理解新框架、核心理念及其在现代IT环境中的应用提出了要求。本文综合介绍了ITIL V4的考试概览、核心框架及其演进、四大支柱、服务生命周期、关键流程与功能以及考试难点,旨在帮助考生全面掌握ITIL V4的理论基础与实践应用。此外,本文提供了实战模拟
【打印机固件升级实战攻略】:从准备到应用的全过程解析

# 摘要
本文综述了打印机固件升级的全过程,从前期准备到升级步骤详解,再到升级后的优化与维护措施。文中强调了环境检查与备份的重要性,并指出获取合适固件版本和准备必要资源对于成功升级不可或缺。通过详细解析升级过程、监控升级状态并进行升级后验证,本文提供了确保固件升级顺利进行的具体指导。此外,固件升级后的优化与维护策略,包括调整配置、问题预防和持续监控,旨在保持打印机最佳性能。本文还通过案
【U9 ORPG登陆器多账号管理】:10分钟高效管理你的游戏账号

# 摘要
本文详细探讨了U9 ORPG登陆器的多账号管理功能,首先概述了其在游戏账号管理中的重要性,接着深入分析了支持多账号登录的系统架构、数据流以及安全性问题。文章进一步探讨了高效管理游戏账号的策略,包括账号的组织分类、自动化管理工具的应用和安全性隐私保护。此外,本文还详细解析了U9 ORPG登陆器的高级功能,如权限管理、自定义账号属性以及跨平台使用
【编译原理实验报告解读】:燕山大学案例分析
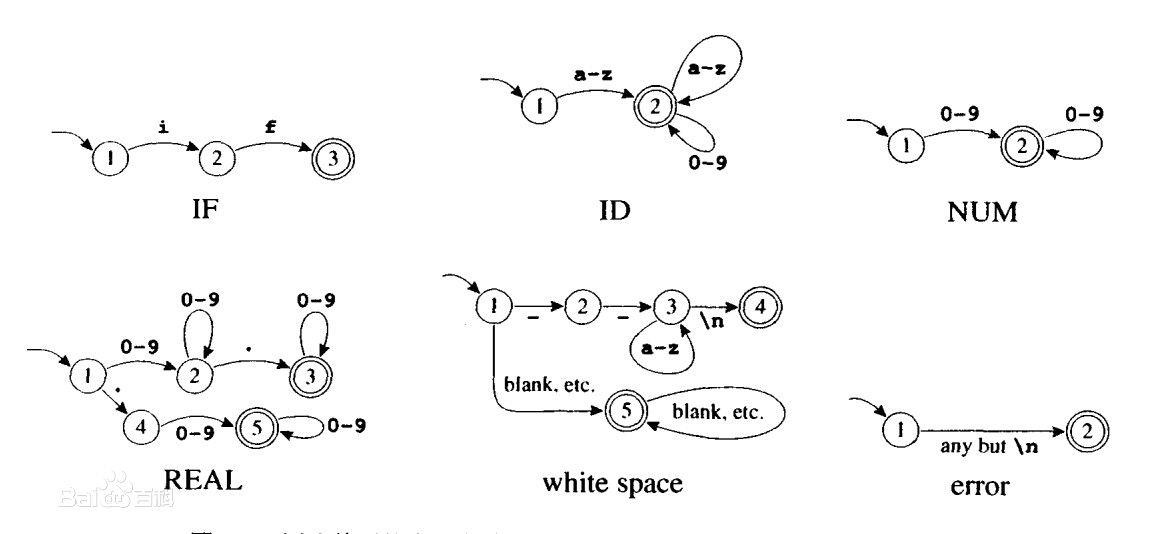
# 摘要
本文是关于编译原理的实验报告,首先介绍了编译器设计的基础理论,包括编译器的组成部分、词法分析与语法分析的基本概念、以及语法的形式化描述。随后,报告通过燕山大学的实验案例,深入分析了实验环境、工具以及案例目标和要求,详细探讨了代码分析的关键部分,如词法分析器的实现和语法分析器的作用。报告接着指出了实验中遇到的问题并提出解决策略,最后展望了编译原理实验的未来方向,包括最新研究动态和对
【中兴LTE网管升级与维护宝典】:确保系统平滑升级与维护的黄金法则

# 摘要
本文详细介绍了LTE网管系统的升级与维护过程,包括升级前的准备工作、平滑升级的实施步骤以及日常维护的策略。文章强调了对LTE网管系统架构深入理解的重要性,以及在升级前进行风险评估和备份的必要性。实施阶段,作者阐述了系统检查、性能优化、升级步骤、监控和日志记录的重要性。同时,对于日常维护,本文提出监控KPI、问题诊断、维护计划执行以及故障处理和灾难恢复措施。案例研究部分探讨了升级维护实践中的挑战与解决方案。最后,文章展望了LT
故障诊断与问题排除:合泰BS86D20A单片机的自我修复指南
# 摘要
本文系统地介绍了故障诊断与问题排除的基础知识,并深入探讨了合泰BS86D20A单片机的特性和应用。章节二着重阐述了单片机的基本概念、硬件架构及其软件环境。在故障诊断方面,文章提出了基本的故障诊断方法,并针对合泰BS86D20A单片机提出了具体的故障诊断流程和技巧。此外,文章还介绍了问题排除的高级技术,包括调试工具的应用和程序自我修复技术。最后,本文就如何维护和优化单片
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )