单片机步进电机控制程序的仿真与模拟:验证设计,优化性能,确保可靠
发布时间: 2024-07-11 14:43:31 阅读量: 58 订阅数: 26 

# 1. 单片机步进电机控制原理
步进电机是一种将电脉冲信号转化为角位移或线位移的执行器。其控制原理是通过单片机输出特定脉冲序列,驱动步进电机按一定步距和方向运动。
单片机步进电机控制系统主要由单片机、步进电机驱动器和步进电机组成。单片机负责产生脉冲信号,控制步进电机的运动方向和步长;步进电机驱动器负责放大单片机输出的脉冲信号,并驱动步进电机运动;步进电机将电脉冲信号转换为角位移或线位移。
脉冲信号的频率和相位决定了步进电机的转速和方向。通过改变脉冲信号的频率,可以控制步进电机的转速;通过改变脉冲信号的相位,可以控制步进电机的运动方向。
# 2. 步进电机控制程序的仿真
### 2.1 仿真环境搭建
**搭建步骤:**
1. 安装仿真软件(如 MATLAB/Simulink)
2. 创建新项目并导入步进电机模型
3. 配置仿真参数(如仿真时间、步长)
**参数说明:**
| 参数 | 说明 |
|---|---|
| Simulation Time | 仿真时间 |
| Solver | 求解器 |
| Step Size | 步长 |
### 2.2 仿真模型建立
**模型结构:**
* **输入:** 脉冲信号(控制步进电机运动)
* **模型:** 步进电机模型(模拟步进电机的物理特性)
* **输出:** 电机位置、速度、电流等数据
**代码块:**
```
% 输入脉冲信号
pulse_signal = square(2*pi*50*t, 50);
% 步进电机模型
motor_model = Simulink.Blocks.Motor.StepperMotor;
motor_model.Resistance = 1; % 电阻
motor_model.Inductance = 0.01; % 电感
motor_model.Inertia = 0.001; % 惯量
% 输出数据
position = motor_model.Output.Position;
speed = motor_model.Output.Speed;
current = motor_model.Output.Current;
```
**逻辑分析:**
* `pulse_signal`生成一个方波信号,频率为 50Hz,占空比为 50%。
* `motor_model`模拟一个步进电机,其电阻、电感和惯量分别为 1Ω、0.01H 和 0.001kg·m²。
* `position`、`speed`和`current`分别表示电机的角度位置、速度和电流。
### 2.3 仿真结果分析
**结果图示:**
[图片:仿真结果图示]
**分析:**
* 电机在脉冲信号的驱动下,以恒定的速度旋转。
* 电机的速度与脉冲频率成正比。
* 电机的电流在脉冲信号的上升沿和下降沿出现尖峰。
**mermaid流程图:**
```mermaid
sequenceDiagram
participant User
participant Simulation Software
User->Simulation Software: Create new project
Simulation Software->User: Display project creation options
User->Simulation Software: Import step motor model
Simulation Software->User: Display model import options
User->Simulation Software: Configure simulation parameters
Simulation Software->User: Display simulation parameter options
User->Simulation Software: Run simulation
Simulation Software->User: Display simulation results
```
# 3. 步进电机

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了单片机控制步进电机的程序设计,从原理到实战,一步步指导读者掌握步进电机控制技术。专栏涵盖了程序原理、算法优化、性能提升、调试测试、应用实例、选型评估、最佳实践、误区陷阱、深入分析、代码优化、仿真模拟、硬件设计、故障诊断、工业应用、医疗应用、科研创新、教学培训、标准规范等各个方面。通过深入浅出的讲解、丰富的实例和实用的技巧,本专栏旨在帮助读者全面掌握单片机步进电机控制程序设计,提升其专业水平,推动行业发展。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
LabVIEW TCP_IP编程进阶指南:从入门到高级技巧一步到位
# 摘要
本文旨在全面介绍LabVIEW环境下TCP/IP编程的知识体系,从基础概念到高级应用技巧,涵盖了LabVIEW网络通信的基础理论与实践操作。文中首先介绍了TCP/IP通信协议的深入解析,包括模型、协议栈、TCP与UDP的特点以及IP协议的数据包结构。随后,通过LabVIEW中的编程实践,本文展示了TCP/IP通信在LabVIEW平台下的实现方法,包括构建客户端和服务器以及UDP通信应用。文章还探讨了高级应用技巧,如数据传输优化、安全性与稳定性改进,以及与外部系统的集成。最后,本文通过对多个项目案例的分析,总结了LabVIEW在TCP/IP通信中的实际应用经验,强调了LabVIEW在实
移动端用户界面设计要点

# 摘要
本论文全面探讨了移动端用户界面(UI)设计的核心理论、实践技巧以及进阶话题。第一章对移动端UI设计进行概述,第二章深入介绍了设计的基本原则、用户体验设计的核心要素和设计模式。第三章专注于实践技巧,包括界面元素设计、交互动效和可用性测试,强调了优化布局和响应式设计的重要性。第四章展望了跨平台UI框架的选择和未来界面设计的趋势,如AR/VR和AI技术的集成。第五章通过案例研究分析成功设计的要素和面临的挑战及解决
【故障排查的艺术】:快速定位伺服驱动器问题的ServoStudio(Cn)方法
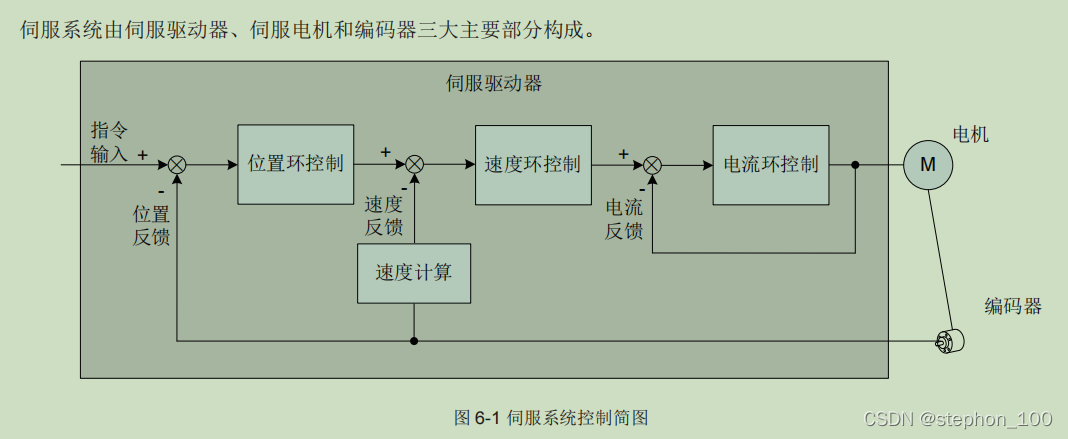
# 摘要
本文全面介绍了伺服驱动器的故障排查艺术,从基础理论到实际应用,详细阐述了伺服驱动器的工作原理、结构与功能以及信号处理机
GX28E01散热解决方案:保障长期稳定运行,让你的设备不再发热
# 摘要
本文针对GX28E01散热问题的严峻性进行了详细探讨。首先,文章从散热理论基础出发,深入介绍了热力学原理及其在散热中的应用,并分析了散热材料与散热器设计的重要性。接着,探讨了硬件和软件层面的散热优化策略,并通过案例分析展示了这些策略在实际中的应用效果。文章进一步探讨了创新的散热技术,如相变冷却技术和主动冷却系统的集成,并展望了散热技术与热管理的未来发展趋势。最后,分析了散热解决方案的经济效益,并探讨了散
无缝集成秘籍:实现UL-kawasaki机器人与PROFINET的完美连接

# 摘要
本文综合介绍了UL-kawasaki机器人与PROFINET通信技术的基础知识、理论解析、实践操作、案例分析以及进阶技巧。首先概述了PROFINET技术原理及其
PDMS设备建模准确度提升:确保设计合规性的5大步骤

# 摘要
本文探讨了PDMS设备建模与设计合规性的基础,深入分析了建模准确度的定义及其与合规性的关系,以及影响PDMS建模准确度的多个因素,包括数据输入质量、建模软件特性和设计者技能等。文章接着提出了确保PDMS建模准确度的策略,包括数据准备、验证流程和最佳建模实践。进一步,本文探讨了PDMS建模准确度的评估方法,涉及内部和外部评估
立即掌握!Aurora 64B-66B v11.2时钟优化与复位策略

# 摘要
本文全面介绍了Aurora 64B/66B的时钟系统架构及其优化策略。首先对Aurora 64B/66B进行简介,然后深入探讨了时钟优化的基础理论,包括时钟域、同步机制和时
掌握CAN协议:10个实用技巧快速提升通信效率
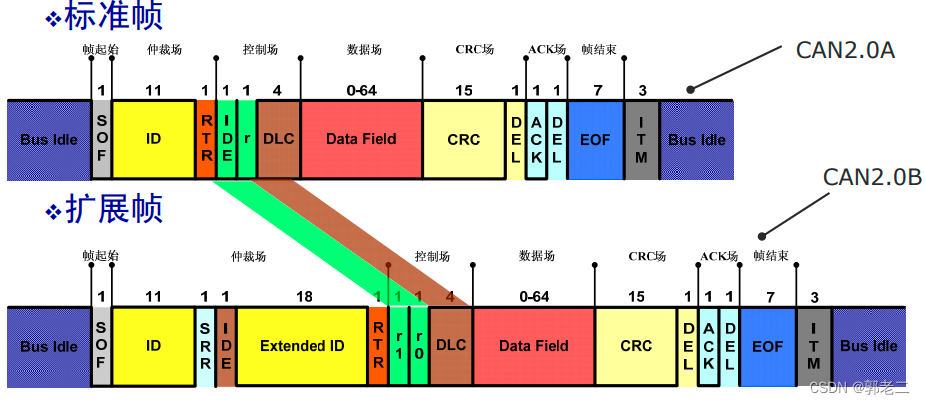
# 摘要
本论文全面介绍了CAN协议的基础原理、硬件选择与配置、软件配置与开发、故障诊断与维护以及在不同领域的应用案例。首先,概述了CAN协议的基本概念和工作原理,然后详细探讨了在选择CAN控制器和收发器、设计网络拓扑结构、连接硬件时应考虑的关键因素以及故障排除技巧。接着,论文重点讨论了软件配置,包括CAN协议栈的选择与配置、消息过滤策略和性能优化。此外,本研究还提供了故障诊断与维护的基
【金字塔构建秘籍】:专家解读GDAL中影像处理速度的极致优化

# 摘要
本文系统地介绍了GDAL影像处理的基础知识、关键概念、实践操作、高级优化技术以及性能评估与调优技巧。文章首先概述了GDAL库的功能和优势,随后深入探讨了影像处理速度优化的理论基础,包括时间复杂度、空间复杂度和多线程并行计算原理,以及GPU硬件加速的应用。在实践操作章节,文章分析了影像格式优化、缓冲区与瓦片技术的应用以及成功案例研究。高级优化技术与工具章节则讨论了分割与融合技术
电子技术期末考试:掌握这8个复习重点,轻松应对考试
# 摘要
本文全面覆盖电子技术期末考试的重要主题和概念,从模拟电子技术到数字电子技术,再到信号与系统理论基础,以及电子技术实验技能的培养。首先介绍了模拟电子技术的核心概念,包括放大电路、振荡器与调制解调技术、滤波器设计。随后,转向数字电子技术的基础知识,如逻辑门电路、计数器与寄存器设计、时序逻辑电路分析。此外,文章还探讨了信号与系统理论基础,涵盖信号分类、线性时不变系统特性、频谱分析与变换。最后,对电子技术实验技能进行了详细阐述,包括电路搭建与测试、元件选型与应用、实验报告撰写与分析。通过对这些主题的深入学习,学生可以充分准备期末考试,并为未来的电子工程项目打下坚实的基础。
# 关键字
模拟
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )