【LiDAR点云分类速成】:5大技巧快速区分地面与非地面点


基于强度与颜色信息的地面LiDAR点云联合分类方法
摘要
LiDAR点云分类是利用激光雷达技术获取的大量点云数据进行分析和分类的过程。本文首先概述了点云分类的重要性,随后详细探讨了LiDAR点云数据的结构特点和预处理方法,包括点云的生成原理、常见格式、数据清洗、滤波技术及坐标转换。接着,本文着重于地面与非地面点的理论基础和分类识别技巧,深入解析了点云分类中的算法技巧,尤其是基于规则的方法和机器学习的应用。最后,文章通过实践应用展示了地面与非地面点的自动化分类工具,并讨论了分类效果的评估与优化策略。本文旨在为LiDAR点云分类提供全面的理论支持和实用指南。
关键字
LiDAR点云;点云分类;数据结构;预处理;机器学习;自动化工具
参考资源链接:LiDAR360林业教程:从点云预处理到胸径提取
1. LiDAR点云分类概述
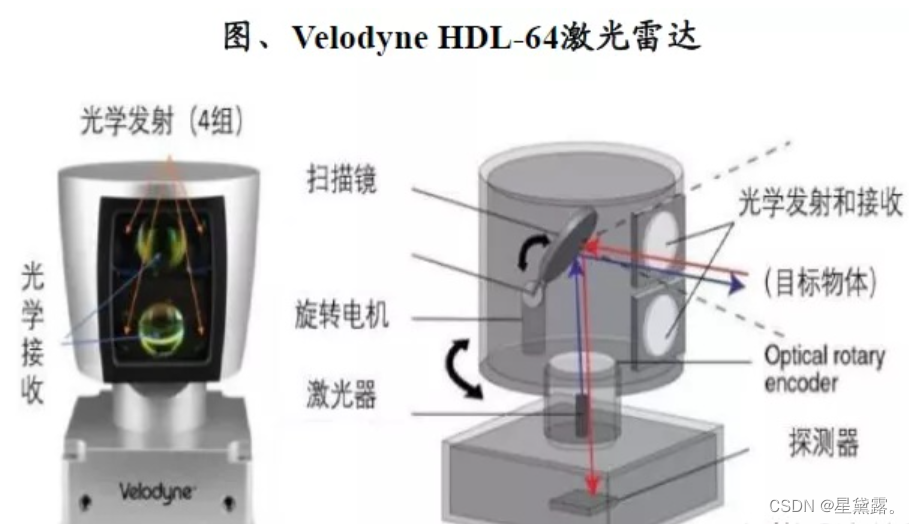
在现代地理信息系统(GIS)与遥感技术中,LiDAR(Light Detection and Ranging)是一种通过发射激光脉冲并接收其反射光来测量目标物到激光器之间的距离的技术。生成的点云数据能够以三维形式精准地表示地球表面和地物的形态,这对于城市规划、灾害监测、资源勘测等诸多领域具有重大意义。
LiDAR点云分类技术的目的是识别和区分点云数据中的不同地物类型,如地面、建筑物、植被等。这个过程在地理空间数据分析中至关重要,因为它可以将原始的点云数据转换为具有实际意义的地理信息,进而用于制图、建模和分析等后续处理。
本章节将简要介绍LiDAR点云分类的基本概念,并概述分类技术在不同应用中的重要性和实现的基本步骤,为后续章节更深入的技术分析和案例研究奠定基础。
2. 理解LiDAR点云数据结构
2.1 LiDAR点云数据的特点
2.1.1 点云数据的生成原理
激光雷达(LiDAR)通过发射激光脉冲并接收反射回来的光来测量距离,从而生成三维空间中的点云数据。这一过程是通过激光脉冲在不同时间的回波到达时间来确定的,进而算出与物体表面的距离。点云数据由成千上万个从激光扫描仪中获得的点坐标组成,这些点坐标能够精确表示物体的表面特性。
当激光脉冲击中地表或物体表面时,它会反射回来并被LiDAR的探测器捕捉。通过测量从发射到接收的时间,可以计算出光程。由于光速是已知的,所以可以将时间转换为距离。最终,这些距离信息与激光扫描仪的角度和位置结合,生成每个点的空间坐标(x, y, z)。通过连续的测量,我们可以得到一系列的点,这些点构成点云数据。
2.1.2 点云数据的常见格式
点云数据通常被保存在特定的文件格式中,用以存储点的坐标信息以及可能的附加数据,如反射率、颜色、时间戳等。这些格式对数据的存储和交换很重要,且对于数据处理和可视化工具的兼容性也很重要。
常见的点云数据格式有:
- LAS/LAZ:这是行业内广泛使用的标准化二进制格式,LAS格式文件可以存储额外的属性信息,并且支持压缩存储(LAZ)。
- PLY:点云库(Point Cloud Library)常用的格式,支持点的属性信息,并允许用户定义自己的属性。
- TXT/CSV:文本格式,简单但不高效,常用于小型数据集或数据交换。
不同的格式有各自的优势和限制,选择合适的数据格式对于后续数据处理和应用至关重要。
2.2 LiDAR点云数据的预处理
2.2.1 数据清洗和噪声去除
原始的LiDAR点云数据通常会包含噪声和异常值,这可能影响后续处理和分类效果。数据清洗是点云预处理中非常重要的一步,其主要目的是去除无用或错误的数据点,保留有用的点云信息。
去除噪声的常见方法包括:
- 统计滤波:通过计算一定邻域内的统计量(如均值、中位数等),将异常点识别为噪声。
- 空间滤波:基于空间关系,利用空间邻域的概念来识别和去除噪声点。
代码示例:
- import numpy as np
- import open3d as o3d
- # 加载点云数据
- pcd = o3d.io.read_point_cloud("path_to_point_cloud.las")
- # 应用统计滤波器去除噪声
- cl, ind = pcd.remove_statistical_outlier(nb_neighbors=20, std_ratio=2.0)
- pcd_outlier_removed = pcd.select_by_index(ind)
- o3d.io.write_point_cloud("path_to_filtered_point_cloud.pcd", pcd_outlier_removed)
在这个Python代码块中,remove_statistical_outlier 函数基于统计方法去除异常值。nb_neighbors 参数指定邻域内点的数量,std_ratio 参数指定标准差倍数阈值,用于识别异常点。
2.2.2 点云数据的滤波技术
滤波是点云预处理的另一关键步骤,其目的是平滑数据或者增强特定特征。滤波器可以去除不必要的细节,突出主要特征,或者将数据转换到特定的坐标系中。
常见的滤波技术有:
- 高斯滤波:使用高斯分布权重来平滑点云数据,减少噪声影响。
- 体素滤波:将点云转换为体素网格,然后对体素内点进行滤波处理。
2.2.3 点云数据的坐标转换
为了实现不同坐标系下的数据融合,点云数据的坐标转换是必要的。常见的坐标系包括世界坐标系、传感器坐标系等。不同坐标系之间转换通常涉及平移、旋转等操作。
代码示例:
- import numpy as np
- import open3d as o3d
- # 假设我们有一个点云和变换矩阵
- pcd = o3d.geometry.PointCloud()
- pcd.points = o3d.utility.Vector3dVector(np.random.rand(1000, 3))
- transformation = np.eye(4) # 单位矩阵,表示没有变换
- transformation[0, 3] = 1.0 # 示例:x轴平移1单位
- # 应用坐标转换
- pcd.transform(transformation)
在上述代码中,transform 函数利用变换矩阵对点云进行坐标变换。这是在点云数据处理中常见的一个操作,用来对齐或转换点云数据到另一个坐标系。
滤波与坐标转换效果对比
下表展示了滤波前后的点云数据和坐标转换前后的点云数据的对比:
| 滤波前点云 | 滤波后点云 | 坐标转换前点云 | 坐标转换后点云 |
|---|---|---|---|
通过可视化手段,我们可以直观地观察到滤波和坐标转换给点云数据带来的变化。这样不仅有助于理解数据处理流程,还有助于后续的分析工作。
通过以上几个方面的介绍和示例,我们对LiDAR点云数据的特点有了全面的了解,接下来章节将深入探讨地面与非地面点的理论基础。
3. 地面与非地面点的理论基础
3.1 地面点的几何特性
3.1.1 地面点的定义和判据
地面点是指在L

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
相关推荐
 百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Fluentd新手必备】:7步打造高效日志收集与分析系统
信息安全管理体系基础知识深度解读:ISO_IEC 27000系列标准全面剖析
【并行计算】:加速模拟不是梦:Discovery Studio并行计算实战指南
智能视觉系统中的Zynq-7000 SoC:应用与解决方案
【专家揭秘】Office自动判分系统与竞品的比较分析
【云存储解决方案】:DzzOffice小胡版onlyoffice插件与云服务无缝对接
【信息共享安全】:探索HIS区块链应用的未来路径
技术选型比较:不同自动应答文件开发框架的深度剖析
电源设计与分析:3D IC设计中的EDA工具高级技巧
鸿蒙系统版网易云音乐播放列表与歌单策略:用户习惯与算法的协同进化


专栏目录

文章持续更新中,敬请期待~
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )










