单片机力控系统赋能智慧城市:打造智能城市,提升城市管理效率
发布时间: 2024-07-14 07:22:20 阅读量: 45 订阅数: 50 

数字孪生赋能智慧城市大脑建设方案.pptx

# 1. 单片机力控系统概述
单片机力控系统是一种基于单片机的控制系统,用于测量和控制机械设备的力。它广泛应用于工业自动化、机器人技术和智能家居等领域。
本系统由传感器、单片机、执行器和控制算法组成。传感器测量设备的力,单片机根据控制算法处理测量数据并输出控制信号,执行器根据控制信号驱动设备运动。
单片机力控系统具有体积小、成本低、易于集成等优点,使其成为力控领域的理想选择。
# 2. 单片机力控系统理论基础
### 2.1 力控原理及算法
**力控原理**
力控是指通过控制机械臂或其他执行器,使之施加或承受指定力或力矩的过程。力控系统的核心原理是利用传感器测量实际施加的力或力矩,并将其与目标力或力矩进行比较。根据比较结果,控制器计算出所需的控制信号,驱动执行器调整其输出力或力矩,从而实现对力的精确控制。
**力控算法**
常用的力控算法包括:
- **PID 控制算法:**一种经典的控制算法,通过比例、积分和微分项调节控制信号,实现对力的稳定控制。
- **自适应控制算法:**一种能够自动调整控制参数的算法,可以适应系统参数的变化,提高力控精度。
- **神经网络控制算法:**一种基于神经网络的算法,可以学习系统非线性特性,实现高精度的力控。
### 2.2 单片机系统架构与工作原理
**单片机系统架构**
单片机是一种集成了处理器、存储器和输入/输出接口等功能于一体的微型计算机。其典型架构包括:
- **中央处理器 (CPU):**执行指令和处理数据。
- **存储器:**存储程序和数据。
- **输入/输出接口:**与外部设备通信。
**单片机工作原理**
单片机的工作原理如下:
1. **取指:**CPU 从存储器中读取指令。
2. **译码:**CPU 解码指令,确定指令的操作码和操作数。
3. **执行:**CPU 执行指令,对数据进行处理。
4. **存储:**CPU 将处理结果存储到存储器中。
5. **跳转:**CPU 根据条件判断,跳转到下一条指令。
**代码块:**
```c
// 初始化单片机
void init_mcu() {
// 设置时钟频率
CLK_SetSystemClock(CLK_SYSCLK_SOURCE_PLL, 72000000);
// 初始化 GPIO
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = GPIO_PIN_All;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
```
**代码逻辑分析:**
该代码块初始化单片机,包括设置时钟频率和初始化 GPIO。
- `CLK_SetSystemClock` 函数设置系统时钟频率为 72MHz。
- `GPIO_Init` 函数初始化 GPIOA 所有引脚为输出模式,无上拉/下拉电阻。
**参数说明:**
- `CLK_SetSystemClock` 函数参数:
- `CLK_SYSCLK_SOURCE_PLL`:时钟源为 PLL。
- `72000000`:时钟频率为 72MHz。
- `GPIO_Init` 函数参数:

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《单片机力控制》专栏深入探讨了单片机力控制技术的方方面面,从入门基础到高级应用,为读者提供全面的知识和实践指南。专栏涵盖了力控原理、系统设计、算法优化、故障排除、传感器选型、调试测试、工业自动化、医疗器械、机器人、航空航天、汽车电子、可穿戴设备、智能家居、工业物联网、智慧城市和国防工业等领域的实际应用。通过深入浅出的讲解和丰富的案例分析,专栏帮助读者掌握单片机力控制技术,提升系统性能,解决常见问题,并解锁各种创新应用,推动智能制造、医疗保健、机器人技术、航空航天、汽车电子、可穿戴设备、智能家居、工业物联网、智慧城市和国防工业的发展。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
S32K SPI开发者必读:7大优化技巧与故障排除全攻略
# 摘要
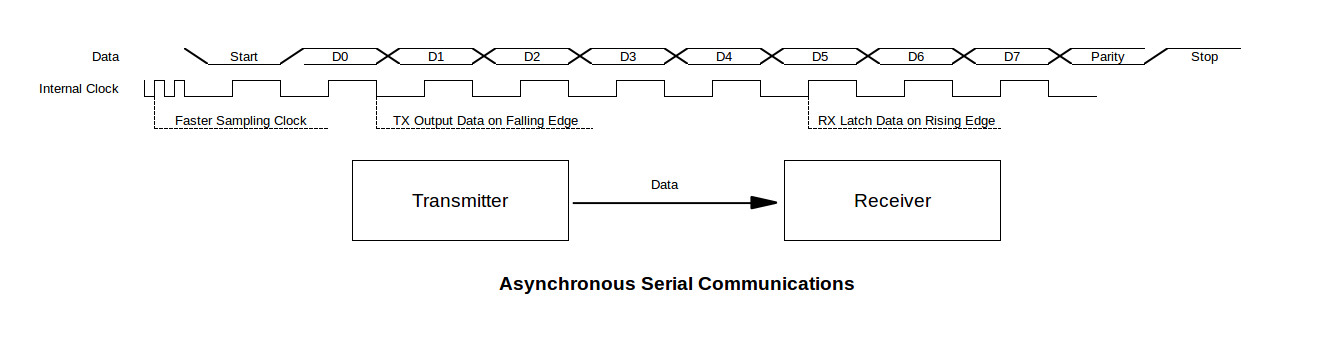
本文深入探讨了S32K微控制器的串行外设接口(SPI)技术,涵盖了从基础知识到高级应用的各个方面。首先介绍了SPI的基础架构和通信机制,包括其工作原理、硬件配置以及软件编程要点。接着,文章详细讨论了SPI的优化技巧,涵盖了代码层面和硬件性能提升的策略,并给出了故障排除及稳定性的提升方法。实战章节着重于故障排除,包括调试工具的使用和性能瓶颈的解决。应用实例和扩展部分分析了SPI在
图解数值计算:快速掌握速度提量图的5个核心构成要素
# 摘要
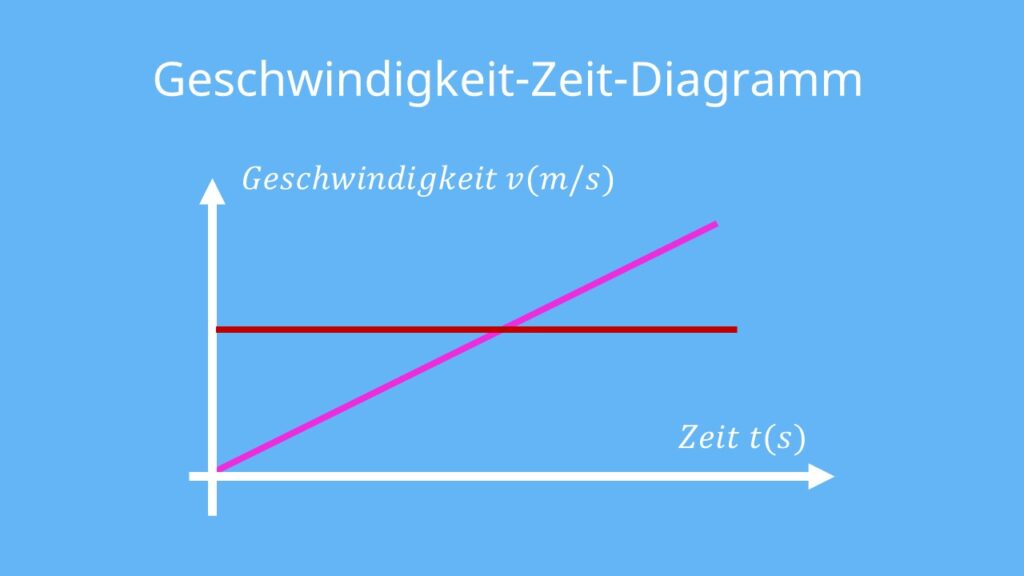
本文全面探讨了速度提量图的理论基础、核心构成要素以及在多个领域的应用实例。通过分析数值计算中的误差来源和减小方法,以及不同数值计算方法的特点,本文揭示了实现高精度和稳定性数值计算的关键。同时,文章深入讨论了时间复杂度和空间复杂度的优化技巧,并展示了数据可视化技术在速度提量图中的作用。文中还举例说明了速度提量图在
动态规划:购物问题的终极解决方案及代码实战

# 摘要
动态规划是解决优化问题的一种强大技术,尤其在购物问题中应用广泛。本文首先介绍动态规划的基本原理和概念,随后深入分析购物问题的动态规划理论,
【随机过程精讲】:工程师版习题解析与实践指南
# 摘要
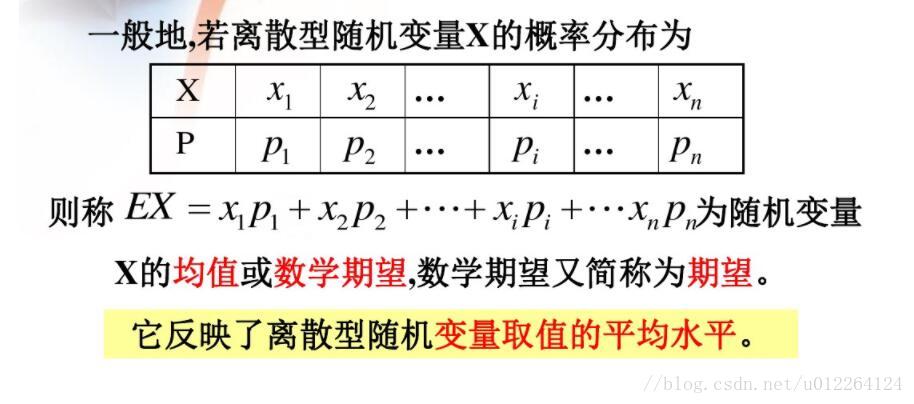
随机过程是概率论的一个重要分支,被广泛应用于各种工程和科学领域中。本文全面介绍了随机过程的基本概念、分类、概率分析、关键理论、模拟实现以及实践应用指南。从随机变量的基本统计特性讲起,深入探讨了各类随机过程的分类和特性,包括马尔可夫过程和泊松过程。文章重点分析了随机过程的概率极限定理、谱分析和最优估计方法,详细解释了如何通过计算机模拟和仿真软件来实现随机过程的模拟。最后,本文通过工程问题中随机过程的实际应用案例,以
【QSPr高级应用案例】:揭示工具在高通校准中的关键效果
# 摘要
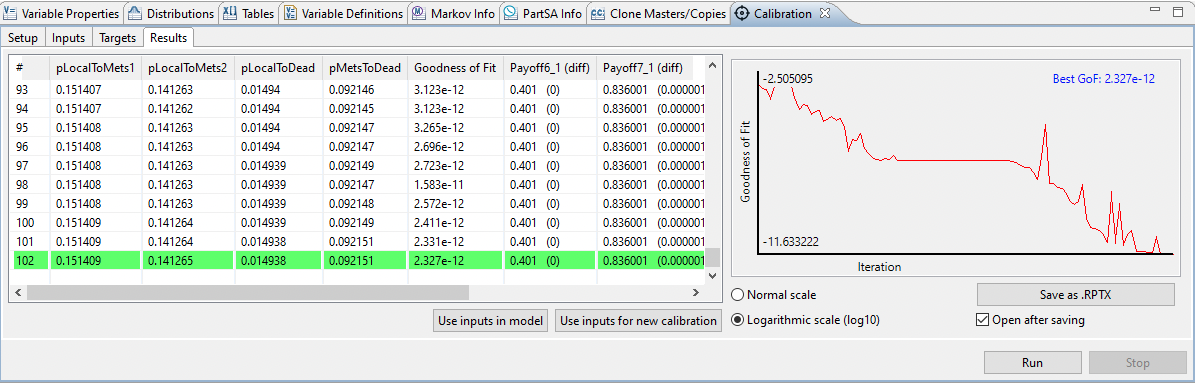
本论文旨在介绍QSPr工具及其在高通校准中的基础和应用。首先,文章概述了QSPr工具的基本功能和理论框架,探讨了高通校准的重要性及其相关标准和流程。随后,文章深入分析了QSPr工具的核心算法原理和数据处理能力,并提供了实践操作的详细步骤,包括数据准备、环境搭建、校准执行以及结果分析和优化。此外,通过具体案例分析展示了QSPr工具在不同设备校准中的定制
Tosmana配置精讲:一步步优化你的网络映射设置

# 摘要
Tosmana作为一种先进的网络映射工具,为网络管理员提供了一套完整的解决方案,以可视化的方式理解网络的结构和流量模式。本文从基础入门开始,详细阐述了网络映射的理论基础,包括网络映射的定义、作用以及Tosmana的工作原理。通过对关键网络映射技术的分析,如设备发现、流量监控,本文旨在指导读者完成Tosmana网络映射的实战演练,并深入探讨其高级应用,包括自动化、安全威胁检测和插件应用。最
【Proteus与ESP32】:新手到专家的库添加全面攻略
# 摘要
本文详细介绍Proteus仿真软件和ESP32微控制器的基础知识、配置、使用和高级实践。首先,对Proteus及ESP32进行了基础介绍,随后重点介绍了在Proteus环境下搭建仿真环境的步骤,包括软件安装、ESP32库文件的获取、安装与管理。第三章讨论了ESP32在Proteus中的配置和使用,包括模块添加、仿真
【自动控制系统设计】:经典措施与现代方法的融合之道
# 摘要
自动控制系统是工业、航空、机器人等多个领域的核心支撑技术。本文首先概述了自动控制系统的基本概念、分类及其应用,并详细探讨了经典控制理论基础,包括开环和闭环控制系统的原理及稳定性分析方法。接着,介绍了现代控制系统的实现技术,如数字控制系统的原理、控制算法的现代实现以及高级控制策略。进一步,本文通过设计实践,阐述了控制系统设计流程、仿真测试以及实际应用案例。此外,分析了自动控制系统设计的当前挑战和未
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )