FANUC宏程序与传感器集成:实现精密控制与反馈的秘诀
发布时间: 2025-01-07 19:31:24 阅读量: 15 订阅数: 11 
# 摘要
本文全面探讨了FANUC宏程序的基础知识、编写、管理以及与传感器技术的集成应用。首先介绍了宏程序的概念和作用,随后深入分析了其结构、高级编程技巧、版本控制与维护。接着,本文转向传感器技术,讨论了它们的分类、工作原理、在自动化中的应用以及数据通讯。在案例分析部分,本文展示了如何通过宏程序实现简单的控制循环和复杂条件下的传感器集成,同时提供了故障诊断与维护策略。文章最后探讨了自适应控制、高级算法在精密控制中的应用,并预测了宏程序与传感器集成的未来趋势。本文旨在为自动化领域的研究者和工程师提供实践指南和创新思路。
# 关键字
FANUC宏程序;传感器技术;自动化控制;集成应用;故障诊断;自适应控制
参考资源链接:[发那科(FANUC)宏程序详解及应用实例](https://wenku.csdn.net/doc/6pmekwbnzg?spm=1055.2635.3001.10343)
# 1. FANUC宏程序的基础概念与作用
## 1.1 宏程序的定义和重要性
FANUC宏程序是为数控机床编程提供的一种高级语言,它允许用户创建能够自动执行特定任务的程序。这通过使用参数和算术运算来实现,为重复任务的自动化提供了便利。宏程序在提高生产效率、减少人为错误和提升产品质量方面发挥着重要作用。
## 1.2 宏程序的工作原理
宏程序通过定义变量和控制逻辑来实现其功能。这些变量可以是数字或字符串,而控制逻辑通常包括条件分支和循环结构,从而允许程序根据不同的输入和机床状态来动态调整其操作。例如,在加工多个相同的零件时,宏程序可以自动调整刀具路径以适应每个零件的具体尺寸。
## 1.3 宏程序与传统编程的对比
与传统的逐行代码编程方法相比,宏程序的优势在于其灵活性和可重用性。一个设计良好的宏程序可以在不同的产品和工艺中复用,减少了重复的编程工作,加快了生产准备时间。此外,宏程序还支持参数化编程,这使得修改程序变得更加简单,只需要调整参数值即可适应新的加工要求。
```mermaid
graph LR
A[启动宏程序] --> B{条件判断}
B -- "条件1成立" --> C[执行操作1]
B -- "条件2成立" --> D[执行操作2]
C --> E{循环判断}
D --> E
E -- "继续循环" --> B
E -- "退出循环" --> F[结束宏程序]
```
上面的流程图简单演示了宏程序中循环和条件判断的基本逻辑,展示了其核心工作原理。下一章将深入了解如何编写和管理这些强大的宏程序。
# 2. FANUC宏程序的编写与管理
FANUC宏程序是数控机床编程中的一种高级功能,它使得程序员能够创建参数化的程序,以此来适应不同尺寸或形状的加工任务。这一章节旨在深入探讨宏程序的编写过程、管理策略以及优化方法,同时分享实用的高级编程技巧。
## 2.1 宏程序的基本结构
### 2.1.1 宏变量和宏指令
宏程序的核心在于宏变量和宏指令的使用。宏变量提供了数据存储和计算的功能,而宏指令则允许程序在执行时作出逻辑选择或循环处理。
宏变量可以是整数、实数,也可以是字符串类型。它们可以根据输入或计算结果进行动态赋值。宏指令则是预定义的宏程序中执行特定操作的代码块,比如条件分支的 `IF` 、循环的 `WHILE` 或 `REPEAT` 等。
```gcode
#100 = 10 ; 定义宏变量 #100,并赋值为10
IF [#100 GT 5] ; 如果宏变量 #100 大于5,则执行后续语句
#101 = [#100 * 2] ; 宏变量 #101 被赋值为 #100 的两倍
G01 X[#101] ; 线性插补到X轴 #101 的位置
ENDIF ; 条件结束
```
上面的代码块中,变量 `#100` 和 `#101` 用于存储和计算数值,`IF` 指令用于实现条件逻辑。这种结构极大地增加了程序的灵活性和通用性。
### 2.1.2 宏程序的条件分支和循环
宏程序能够通过条件分支和循环来处理复杂的逻辑和重复的任务。条件分支允许程序根据条件执行不同的代码路径,循环则能执行代码块多次,直至满足特定条件。
```gcode
WHILE [#100 LE 20] ; 循环开始,当 #100 小于或等于20时继续循环
#100 = [#100 + 1] ; 增加 #100 的值
G01 X[#100] ; 线性插补到新的X轴位置
ENDWHILE ; 循环结束
```
此代码块演示了一个简单的 `WHILE` 循环,每次循环都将 `#100` 的值增加1,直到它大于20为止。
## 2.2 宏程序的高级编程技巧
### 2.2.1 子程序和用户宏程序的使用
在复杂的应用场景中,子程序和用户宏程序可以提高程序的可读性和模块化。子程序是一种通过程序跳转指令调用的程序段,用户宏程序则能够通过参数传递实现更复杂的控制逻辑。
```gcode
#102 = 5 ; 用户宏变量 #102 赋值
G65 P1234 X#102 ; 调用子程序号1234,并传递参数 #102
END ; 宏程序结束
#1234 ; 子程序开始
G00 X#10 ; 快速移动到X轴位置 #10
[此处编写子程序代码] ; 子程序的详细操作
END ; 子程序结束
```
在这个例子中,`G65` 指令用于调用子程序,`P1234` 表示子程序号,`X#102` 是传递给子程序的参数。子程序可以有多个步骤,每个步骤都由程序段号(如 `#1234`)标识。
### 2.2.2 错误处理和优化
错误处理对于确保程序的稳定运行至关重要。在宏程序中,可以使用条件语句检测错误,并执行错误恢复程序。
优化宏程序可以提升效率和可靠性,同时减少资源消耗。一些优化措施包括减少不必要的数据复制、使用更快的算法以及合理安排宏程序的执行顺序。
```gcode
GOTO 1000 ; 如果发现错误,跳转到错误处理程序段
1000:
[此处编写错误恢复代码]
END ; 程序结束
```
上述代码使用了 `GOTO` 指令来跳转到错误处理代码段,实现了基本的错误处理机制。
## 2.3 宏程序的版本控制和维护
### 2.3.1 版本控制的最佳实践
随着宏程序的持续开发和改进,版本控制成为管理宏程序生命周期的关键部分。版本控制可以帮助追踪变更、回滚到先前版本、并行开发和合并代码。
一般而言,宏程序的版本控制遵循以下最佳实践:
- 为每个宏程序分配唯一版本号,并记录变更日志。
- 使用专业的版本控制系统,如Git,以便跟踪每个版本的修改历史。
- 在代码库中建立分支策略,以处理开发、测试和生产版本。
### 2.3.2 维护和代码重构
宏程序在长期使用过程中,需要进行持续的维护和定期重构。代码重构不仅能够提高代码质量,还可以减少未来的维护成本。
重构的目标包括:
- 提高代码的可读性和可维护性。
- 降低宏程序的复杂度。
- 提升程序效率和性能。
```gcode
; 示例:重构前的代码片段
#100 = 10
#101 = #100 * 2
G01 X#101
; 示例:重构后的代码片段
M98 P2000 ; 调用子程序计算 #101 的值,并执行线性插补
; 子程序 2000
#101 = 20 ; 子程序内部计算 #101 的值
G01 X#101
M99 ; 子程序结束
```
重构过程中,将重复计算的代码替换为子程序调用,不仅简化了主程序,还使得维护变得更加容易。
在本章节中,我们了解了FANUC宏程序的基本结构和高级编程技巧,也探讨了版本控制和维护的最佳实践。通过采用这些策略,可以创建出既稳定又高效的宏程序,以适应不断变化的生产需求和挑战。在下一章节中,我们将深入传感器技术及其在自动化中的应用,探索如何将这些技术与FANUC宏程序相结合,以实现更加智能和精准的控制。
# 3. 传感器技术及其在自动化中的应用
传感器是自动化系统中不可或缺的组成部分,它们能够检测、处理和传输各种环境信号,如温度、压力、速度等。通过与FANUC宏程序的集成,传感器技术能够实现更加复杂和精准的控制任务,从而极大地提升整个自动化系统的性能和效率。
## 3.1 传感器的分类和工作原理
### 3.1.1 常用传感器类型
传感

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0

专栏简介
欢迎来到 FANUC 宏程序专栏,在这里,您将深入了解 FANUC 宏程序的方方面面。从循环和条件判断等基本概念到子程序和自定义功能等高级技术,我们将为您提供全面的指导。此外,您还将学习如何优化宏程序代码,将其与 CNC 编程相结合,并将其应用于智能制造和工业 4.0。通过故障诊断和排除技巧,您将能够快速解决问题并确保宏程序的可靠运行。最后,您将了解 FANUC 宏程序在多轴机床中的应用案例,从而提升加工精度和灵活性。无论您是宏程序新手还是经验丰富的用户,本专栏都将帮助您掌握 FANUC 宏程序的强大功能,并将其应用于您的 CNC 编程任务中,从而提高效率和生产力。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
三菱NZ81GP21-SX型接口板安装与配置:CC-Link IE技术基础完全攻略

# 摘要
CC-Link IE技术作为一种工业以太网解决方案,已被广泛应用于自动化控制领域。本文首先概述了CC-Link IE技术的基本概念及其重要性。随后,重点介绍了三菱NZ81GP21-SX型接口板的硬件结构及功能,并详细阐述了其安装步骤,包括物理安装和固件更新。接着,本文深入探讨了CC-Link I
【Pinpoint性能监控深度解析】:架构原理、数据存储及故障诊断全攻略
# 摘要
Pinpoint性能监控系统作为一款分布式服务追踪工具,通过其独特的架构设计与数据流处理机制,在性能监控领域展现出了卓越的性能。本文首先概述了Pinpoint的基本概念及其性能监控的应用场景。随后深入探讨了Pinpoint的架构原理,包括各组件的工作机制、数据收集与传输流程以及分布式追踪系统的内部原理。第三章分析了Pinpoint在数据存储与管理方面的技术选型、存储模型优化及数据保留策略。在第四章中,本文详细描述了Pinpoint的故障诊断技术,包括故障分类、实时故障检测及诊断实例。第五章探讨了Pinpoint的高级应用与优化策略,以及其未来发展趋势。最后一章通过多个实践案例,分享了
软件工程中的FMEA实战:从理论到实践的完整攻略
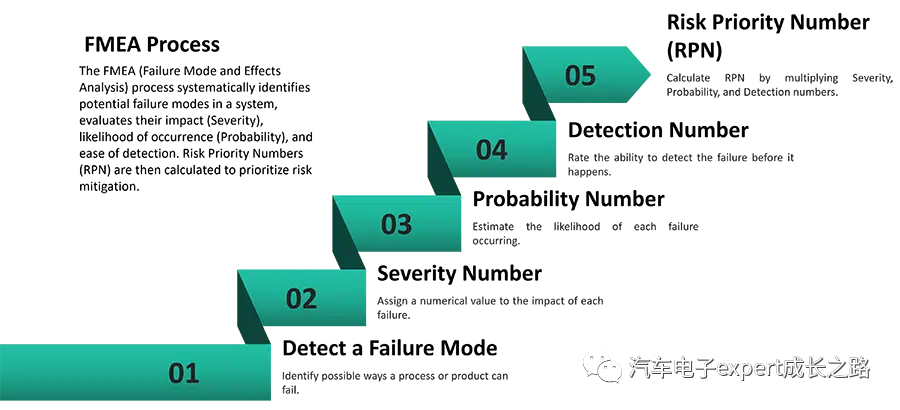
# 摘要
FMEA(故障模式与影响分析)是软件工程中用于提高产品可靠性和安全性的重要质量工具。本文详细解析了FMEA的基本概念、理论基础和方法论,并探讨了其在软件工程中的分类与应用。文章进一步阐述了FMEA实践应用的流程,包括准备工作、执行分析和报告编写等关键步骤。同时,本文还提供了FMEA在敏捷开发环境中的应用技巧,并通过案例研究分享了成功的行
CITICs_KC接口数据处理:从JSON到XML的高效转换策略
![CITICs_KC股票交易接口[1]](https://bytwork.com/sites/default/files/styles/webp_dummy/public/2021-07/%D0%A7%D1%82%D0%BE%20%D1%82%D0%B0%D0%BA%D0%BE%D0%B5%20%D0%9B%D0%B8%D0%BC%D0%B8%D1%82%D0%BD%D1%8B%D0%B9%20%D0%BE%D1%80%D0%B4%D0%B5%D1%80.jpg?itok=nu0IUp1C)
# 摘要
随着信息技术的发展,CITICs_KC接口在数据处理中的重要性日益凸显。本文首先概述了C
光学信号处理揭秘:Goodman版理论与实践,光学成像系统深入探讨

# 摘要
本文系统地介绍了光学信号处理的基础理论、Goodman理论及其深入解析,并探讨了光学成像系统的实践应用。从光学信号处理的基本概念到成像系统设计原理,再到光学信号处理技术的最新进展和未来方向,本文对光学技术领域的核心内容进行了全面的梳理和分析。特别是对Goodman理论在光学成像中的应用、数字信号处理技术、光学计算成像技术进行了深入探讨。同时,本文展望了量子光学信号处理、人工智能在光
队列的C语言实现:从基础到循环队列的进阶应用
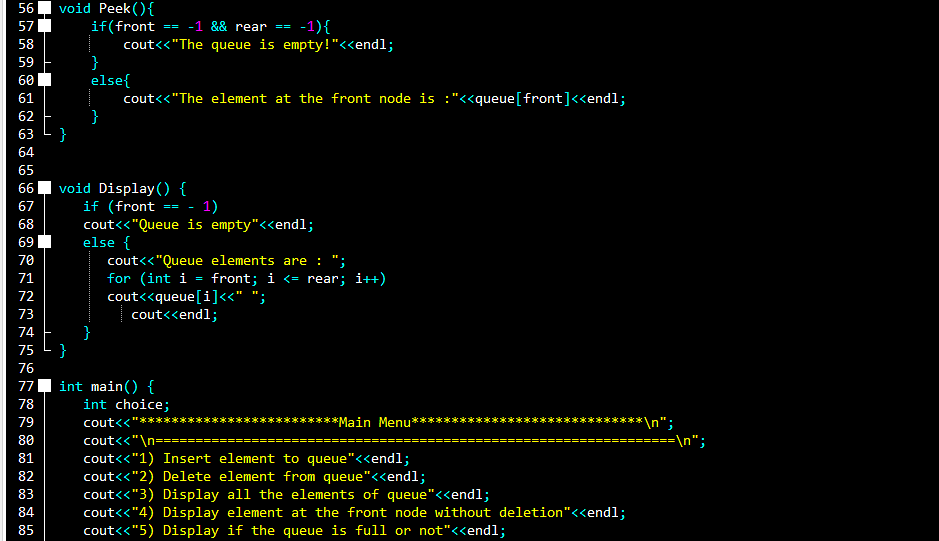
# 摘要
本论文旨在系统地介绍队列这一基础数据结构,并通过C语言具体实现线性队列和循环队列。首先,本文详细解释了队列的概念、特点及其在数据结构中的地位。随后,深入探讨了线性队列和循环队列的实现细节,包括顺序存储结构设计、入队与出队操作,以及针对常见问题的解决方案。进一步,本文探讨了队列在
【CAXA图层管理:设计组织的艺术】:图层管理的10大技巧让你的设计井井有条
# 摘要
图层管理是确保设计组织中信息清晰、高效协同的关键技术。本文首先介绍了图层管理的基本概念及其在设计组织中的重要性,随后详细探讨了图层的创建、命名、属性设置以及管理的理论基础。文章进一步深入到实践技巧,包括图层结构的组织、视觉管理和修改优化,以及CAXA环境中图层与视图的交互和自动化管理。此外,还分析了图层管理中常见的疑难问题及其解决策略,并对图层管理技术的未来发展趋势进行了展望,提出了一系列面向未来的管理策略。
# 关键字
图层管理;CAXA;属性设置;实践技巧;自动化;协同工作;未来趋势
参考资源链接:[CAXA电子图板2009教程:绘制箭头详解](https://wenku.c
NET.VB_TCPIP协议栈深度解析:从入门到精通的10大必学技巧
# 摘要
本文全面探讨了TCP/IP协议栈的基础理论、实战技巧以及高级应用,旨在为网络工程师和技术人员提供深入理解和高效应用TCP/IP协议的指南。文章首先介绍了TCP/IP协议栈的基本概念和网络通信的基础理论,包括数据包的封装与解封装、传输层协议TCP和UDP的原理,以及网络层和网络接口层的关键功能。接着,通过实战技巧章节,探讨了在特定编程环境下如VB进行
MCP41010数字电位计初始化与配置:从零到英雄
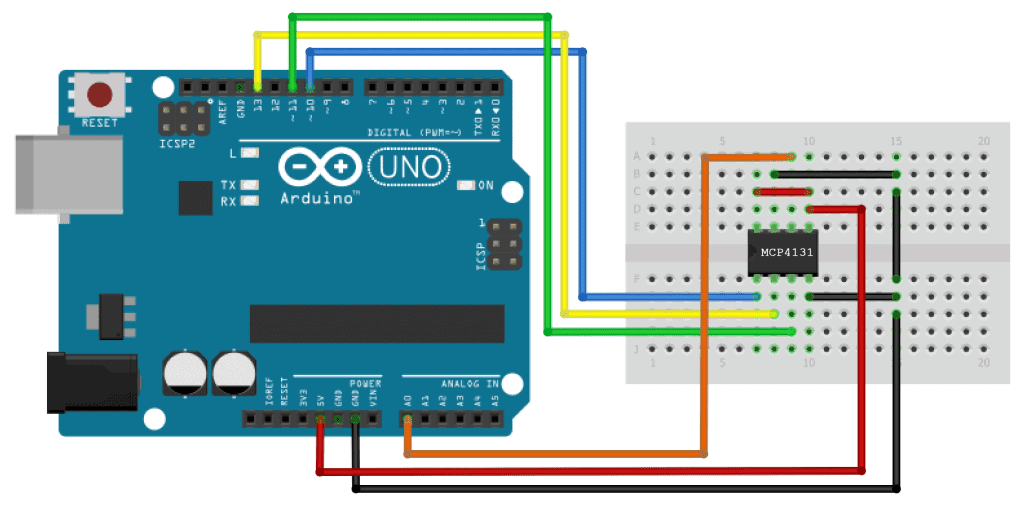
# 摘要
本文全面介绍MCP41010数字电位计的功能、初始化、配置以及高级编程技巧。通过深入探讨其工作原理、硬件接口、性能优化以及故障诊断方法,本文为读者提供了一个实用的技术指导。案例研究详细分析了MCP41010在电路调节、用户交互和系统控制中的应用,以
【Intouch界面初探】:5分钟掌握Intouch建模模块入门精髓

# 摘要
本文系统性地介绍了Intouch界面的基本操作、建模模块的核心概念、实践应用,以及高级建模技术。首先,文章概述了Intouch界面的简介与基础设置,为读者提供了界面操作的起点。随后,深入分析了建模模块的关键组成,包括数据驱动、对象管理、界面布局和图形对象操作。在实践应用部分,文章详细讨论了数据
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )