交通灯单片机程序设计:人工智能算法应用,提升交通效率和安全性
发布时间: 2024-07-08 01:26:34 阅读量: 68 订阅数: 28 

电子硬件单片机设计资料-单片机 交通灯设计论文资料.zip
# 1. 交通灯控制系统的基础
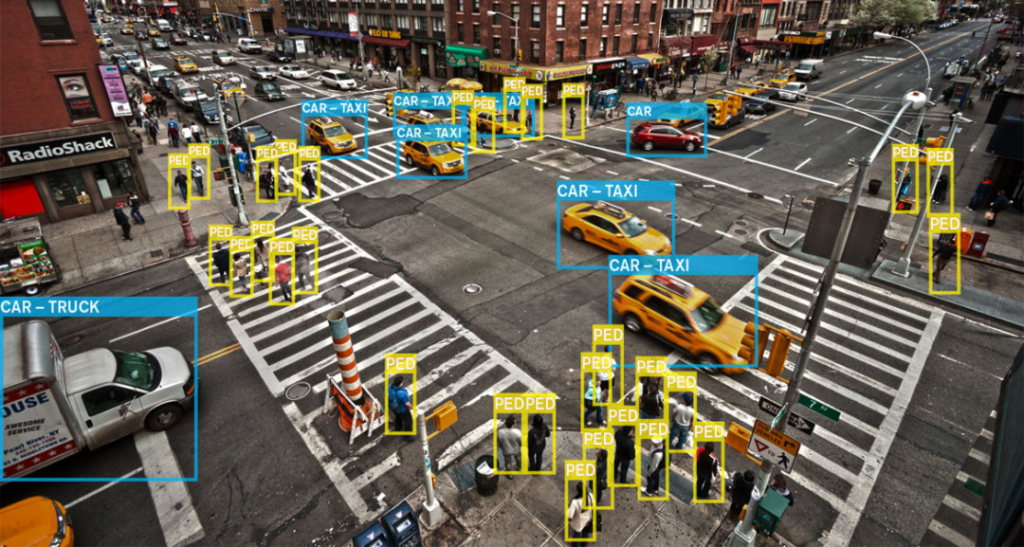
交通灯控制系统是一种智能交通系统,用于管理交通流量,提高道路通行效率和安全性。它由传感器、控制器和执行器组成,通过收集交通数据并根据预先设定的规则控制交通信号灯,来协调车辆和行人的通行。
交通灯控制系统通常采用固定时间控制或自适应控制策略。固定时间控制根据历史交通数据设定固定的信号配时,而自适应控制则根据实时交通状况动态调整信号配时。自适应控制系统可以更有效地应对交通流量的变化,减少拥堵和提高通行效率。
# 2. 人工智能算法在交通灯控制中的应用
**2.1 机器学习算法**
机器学习算法是一种人工智能技术,它使计算机能够从数据中学习,而无需明确编程。在交通灯控制中,机器学习算法可用于预测交通流量并优化信号配时。
**2.1.1 监督学习**
监督学习算法使用标记数据进行训练,其中输入数据与输出标签相关联。对于交通灯控制,标记数据可以包括交通流量数据和最佳信号配时。训练后,监督学习算法可以预测给定交通流量条件下的最佳信号配时。
**代码块:**
```python
import numpy as np
import pandas as pd
# 导入训练数据
data = pd.read_csv('traffic_data.csv')
# 分离输入数据和输出标签
X = data[['traffic_volume', 'time_of_day']]
y = data['signal_timing']
# 训练监督学习模型
from sklearn.linear_model import LinearRegression
model = LinearRegression()
model.fit(X, y)
```
**逻辑分析:**
* `data` 数据框包含训练数据,其中 `traffic_volume` 和 `time_of_day` 是输入特征,`signal_timing` 是输出标签。
* `X` 和 `y` 分别表示输入数据和输出标签。
* `LinearRegression` 类用于训练线性回归模型,该模型将交通流量和时间作为输入,预测最佳信号配时。
**2.1.2 无监督学习**
无监督学习算法使用未标记数据进行训练,其中输入数据不与输出标签相关联。对于交通灯控制,无监督学习算法可用于识别交通模式并检测异常情况。
**代码块:**
```python
from sklearn.cluster import KMeans
# 导入未标记数据
data = pd.read_csv('traffic_data_unlabeled.csv')
# 分离输入数据
X = data[['traffic_volume', 'time_of_day']]
# 训练无监督学习模型
model = KMeans(n_clusters=3)
model.fit(X)
```
**逻辑分析:**
* `data` 数据框包含未标记的训练数据,其中 `traffic_volume` 和 `time_of_day` 是输入特征。
* `X` 表示输入数据。
* `KMeans` 类用于训练 K 均值聚类模型,该模型将交通流量和时间作为输入,识别不同的交通模式。
**2.2 深度学习算法**
深度学习算法是一种机器学习技术,它使用多层神经网络从数据中学习复杂模式。在交通灯控制中,深度学习算法可用于预测交通流量并优化信号配时。
**2.2.1 卷积神经网络**
卷积神经网络 (CNN) 是一种深度学习算法,它特别适合处理具有空间或时间结构的数据。对于交通灯控制,CNN 可用于分析交通流量图像并预测未来交通流量。
**代码块:**
```python
import tensorflow as tf
# 导入交通流量图像数据
data = tf.keras.datasets.mnist.load_data()
# 分离输入数据和输出标签
X_train, X_test, y_train, y_test = data
# 构建 CNN 模型
model = tf.keras.models.Sequential([
tf.keras.layers.Conv2D(32, (3, 3), activation='relu', input_shape=(28, 28, 1)),
tf.keras.layers.MaxPooling2D((2, 2)),
tf.keras.layers.Flatten(),
tf.keras.layers.Dense(128, activation='relu'),
tf.keras.layers.Dense(10, activation='so
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
交通灯单片机程序设计专栏深入探讨了交通灯系统嵌入式程序设计的各个方面。专栏文章涵盖了从性能优化到可靠性提升、从IO口控制到状态机模型应用的广泛主题。它还提供了解决常见问题的解决方案、嵌入式系统调试技巧以及代码重用和模块化设计的最佳实践。此外,专栏还探讨了实时操作系统、人机交互界面设计、无线通信技术集成以及云平台对接等高级概念。通过案例分析和最佳实践,专栏旨在帮助开发人员设计、实现和维护高效、可靠且安全的交通灯系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
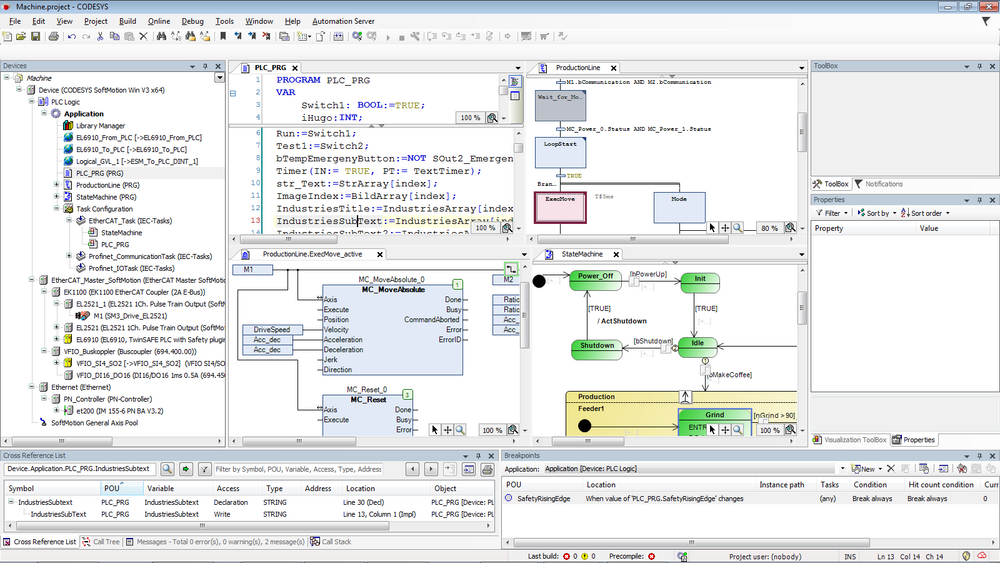
Codesys网络变量深度解析:揭秘双机通讯的优化与性能调优
# 摘要
Codesys网络变量作为工业自动化领域的重要组成部分,其高效、可靠的通信特性对于控制系统的性能至关重要。本文旨在概述Codesys网络变量的通信原理、配置与管理,并提出优化双机通信的策略以及性能调优的实践技巧。通过对网络变量的数据交换机制、配置故障诊断工具的深入分析,以及对传输效率的提高、故障预防与恢复措施的探讨,本文为 Codesys 用户提供了提
【Midas GTS NX基础教程】:0基础开启深基坑分析之旅
# 摘要
本文介绍了Midas GTS NX软件的基本功能和高级应用技巧,旨在为工程师提供一个全面的操作和分析指南。首先,概述了软件的功能和界面布局,包括启动界面、工具栏、菜单栏以及工程模型的建立和编辑。接着,深入探讨了深基坑分析的理论基础和模拟过程,包括土压力理论、开挖模拟方法以及稳定性分析。随后,通过实际案例演练,展示了如何使用Midas GTS NX进行一维、二维和三维深基坑工程的分析。最后,本文强调了软件高级应用的重要性,包括参数化设计、敏感性分析、自定义脚本、自动化工作流以及结果的可视化和报告生成,旨在帮助工程师提升工作效率和分析质量。
# 关键字
Midas GTS NX;界面布
CATIA断面图秘籍:9个技巧让你从新手到设计高手

# 摘要
CATIA作为一种先进的计算机辅助设计软件,在工程设计领域中广泛应用,尤其在处理复杂的三维模型时,其断面图功能展现出了独特的优势。本文旨在向初学者和中级用户提供CATIA断面图的入门指南和操作技巧,深入探讨了断面图工具的界面布局、创建、编辑、参数化设计等核心内容。同时,本文也涵盖了高级技巧,如断面图的优化策略、自动化定制,以及与其他设计元素的交互方法。通过实
【Excel公式全攻略】:从入门到精通,解锁20个隐藏技巧!
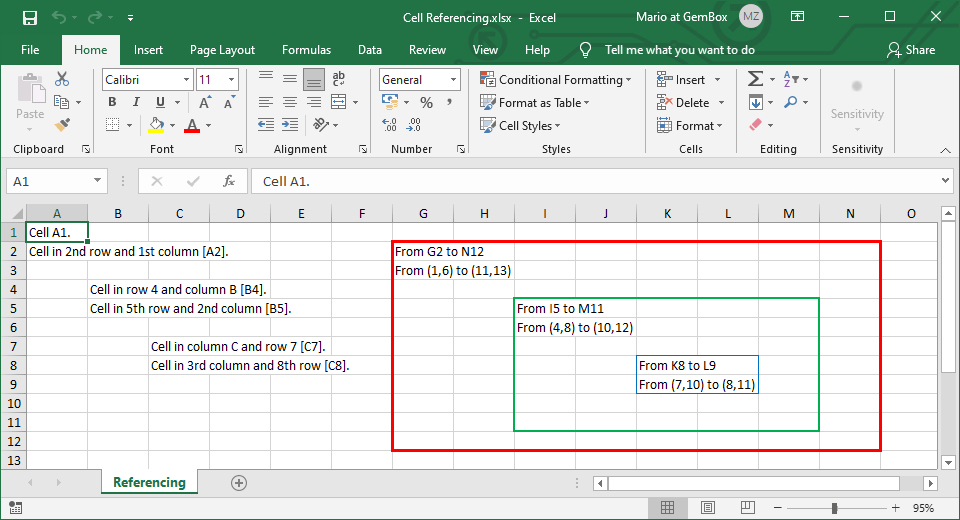
# 摘要
本文旨在全面探讨Excel公式的基础知识、核心概念、高级应用及实践技巧。文章从基础概念开始,详细解释了各类Excel函数的用法和应用场景,涵盖文本处理、日期时间处理以及查找引用等多个方面。进一步地,文章深入探讨了复杂函数在不同场景下的高级技巧,例如条件判断、数据查找匹配以及数据透视表等,并提供了公式故障排除和性能优化的策略
【电子邮件管理高效策略】:专家教你如何有效组织Outlook和Foxmail

# 摘要
随着信息技术的快速发展,电子邮件管理已成为企业和个人用户面临的重大挑战之一。本文首先强调了电子邮件管理的重要性及其所面临的挑战,随后详细介绍了Outlook和Foxmail两款流行邮件客户端的高效管理技巧。这些技巧包括账户设置、邮件组织、高级功能应用以及策略制定与执行。文章通过实践案例分析,展
【从零开始】:构建 Dependencies 在 Win10 的环境,一步到位
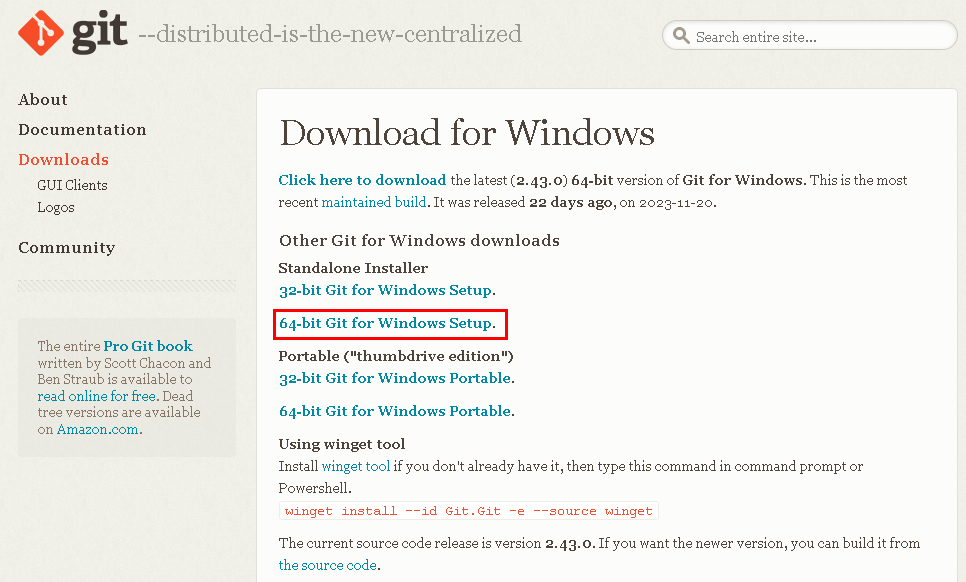
# 摘要
本文阐述了环境构建在软件开发中的重要性及目标,系统性地介绍了依赖项管理的基础知识,探讨了不同工具在Windows环境下的应用,并详细讲解了使用WinGet进行依赖项管理和环境变量设置的具体方法。文章进一步提供了实践环境搭建的步骤,包括使用WinGet安装依赖项、手动处理特定依赖项以及验证和测试环境的完整性和稳定性。此外,还涵盖了高级管理技巧,比如环境配置
深入浅出Qt信号与槽机制:掌握原理,轻松实践
# 摘要
Qt信号与槽机制是该框架核心的组件间通信方法,它支持组件对象的解耦合事件处理。本文从基础理论到高级应用,系统地介绍了信号与槽的定义、连接方式、类型安全以及高级话题如自定义信号槽、继承覆盖和多线程应用。接着,文章详细探讨了在图形用户界面(GUI)中的实际应用,以及与事件处理的结合使用。为提高性能,本文还讨论了性能优化与调试技巧
ANSYS高级热分析技巧:如何处理复杂几何结构的热效应

# 摘要
热分析在工程领域中扮演着至关重要的角色,尤其是在复杂结构和材料性能评估中。本文首先介绍了热分析基础以及ANSYS软件的基本操作入门。接下来,详细探讨了几何建模与网格划分的技巧,包括理论基础、类型选择以及网格质量对分析结果的影响,并通过实践案例进一步说明。材料属性和边界条件的设置对于精确模拟热过程至关重要,本文提供了详尽的材料数据库使用和自定义材料属性方法,同时讨论了
【ZXA10硬件与软件协同解密】:C600_C650_C680的深度性能挖掘
# 摘要
本文对ZXA10硬件与软件协同进行了深入分析,涵盖了硬件架构解析、软件平台深入分析、深度性能挖掘实战、协同开发与未来展望以及案例实战演练。文章首先介绍了ZXA10硬件组件和软件架构的基本情况,接着详细探讨了硬件与软件的交互机制和性能监控调优策略。深入研究了操作系统选型、软件架构设计以及软件与硬件的协同优化。此外,文中还分析了性能基准测试、性能故障诊断、性能优化案例以及协同开发流程和创新方向。最后,通过案例实战演练项目,展示了ZXA10在实际应用中的协同效
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )