Matlab中四元数的基本操作方法
发布时间: 2024-03-15 18:15:43 阅读量: 1339 订阅数: 53 
# 1. 四元数概述
## 1.1 什么是四元数?
在数学中,四元数是一种由一个实部和三个虚部构成的扩数形式,通常表示为$q = a + bi + cj + dk$,其中 $a, b, c, d$ 分别表示实部和三个虚部,而 $i, j, k$ 则分别为虚部单位,满足 $i^2 = j^2 = k^2 = ijk = -1$。四元数具有丰富的代数结构,广泛应用于旋转变换、计算机图形学等领域。
## 1.2 四元数的基本性质
- **加法性质**:四元数的加法满足交换律和结合律。
- **乘法性质**:四元数的乘法满足结合律,但不满足交换律。
- **除法性质**:四元数的除法需要先计算其倒数,并且要注意除法运算可能存在零除以问题。
- **共轭性质**:四元数的共轭是指虚部取负。
- **模性质**:四元数的模是一个非负实数,代表四元数的长度。
## 1.3 四元数在计算机图形学中的应用
在计算机图形学中,四元数常用于表示和变换物体的旋转,主要用于解决欧拉角的万向锁问题、计算插值旋转等。由于四元数具有较好的数值稳定性和提供了高效的旋转插值方式,因此在实际应用中得到广泛适用。
# 2. 在Matlab中表示四元数
在Matlab中,四元数可以通过内置的quaternion对象来表示和操作。quaternion对象包含四个属性,分别代表四元数的实部和三个虚部。以下将介绍在Matlab中表示四元数的方法。
### 2.1 Matlab中四元数的数据结构
Matlab中的quaternion对象由实部和虚部构成,其中实部为一个标量(实数)而虚部为一个长度为3的向量(虚数部分)。这种数据结构简洁地表示了四元数的形式。
### 2.2 创建四元数变量
要在Matlab中创建一个四元数变量,可以使用`quaternion`函数。例如,要创建一个实部为1,虚部为[1, 2, 3]的四元数变量 `q`,可以执行以下代码:
```matlab
q = quaternion(1, 1, 2, 3);
```
### 2.3 四元数的实部和虚部
通过quaternion对象的real和imag属性可以分别获取四元数的实部和虚部。例如,对于上面创建的`q`变量,可以通过以下代码获取其实部和虚部:
```matlab
real_part = q.real;
imaginary_part = q.imag;
```
在Matlab中,通过这种简洁的数据结构和属性操作,可以方便地创建和操作四元数,为后续的四元数运算奠定基础。
接下来,我们将介绍四元数的基本运算,如加法、减法、乘法和除法。
# 3. 四元数的基本运算
在这一章节中,我们将介绍在Matlab中进行四元数的基本运算方法,包括加法、减法、乘法和除法。
#### 3.1 四元数的加法和减法
四元数的加法和减法分别对应于对应元素的加法和减法。在Matlab中,可以通过直接对两个四元数进行加法和减法运算来实现。
```matlab
% 创建两个四元数
q1 = quatnormalize([1, 2, 3, 4]); % 规范化四元数
q2 = quatnormalize([2, -1, 4, 1]);
% 四元数加法
q_add = quatadd(q1, q2);
disp('四元数加法结果:');
disp(q_add);
% 四元数减法
q_sub = quatsubtract(q1, q2);
disp('四元数减法结果:');
disp(q_sub);
```
#### 3.2 四元数的乘法
四元数的乘法是四元数运算中最重要的部分,也是实现旋转、插值等操作的基础。在Matlab中,可以使用quatmultiply函数进行四元数的乘法运算。
```matlab
% 创建两个四元数
q1 = quatnormalize([1, 2, 3, 4]); % 规范化四元数
q2 = quatnormalize([2, -1, 4, 1]);
% 四元数乘法
q_mul = quatmultiply(q1, q2);
disp('四元数乘法结果:');
disp(q_mul);
```
#### 3.3 四元数的除法
四元数的除法实际上是乘以另一个四元数的逆元,即乘以另一个四元数的共轭除以模长的平方。在Matlab中,可以使用quatdivide函数进行四元数的除法运算。
```matlab
% 创建两个四元数
q1 = quatnormalize([1, 2, 3, 4]); % 规范化四元数
q2 = quatnormalize([2, -1, 4, 1]);
% 四元数除法
q_div = quatdivide(q1, q2);
disp('四元数除法结果:');
disp(q_div);
```
通过以上代码和解释,我们可以更好地理解在Matlab中如何进行四元数的基本运算,为后续的操作打下基础。
# 4. 四元数的共轭和模
在四元数的运算中,共轭和模是两个非常重要的操作,它们分别对应着四元数的共轭运算和模运算。接下来我们将详细介绍在Matlab中如何进行四元数的共轭和模运算。
#### 4.1 四元数的共轭运算
四元数的共轭运算是指将四元数中虚部的符号取反,实部保持不变。即对于一个四元数q=a+bi+cj+dk,其共轭记作q_conj=a-bi-cj-dk。在Matlab中,可以通过conj(q)函数来实现四元数q的共轭计算。
下面是一个在Matlab中计算四元数共轭的示例代码:
```matlab
% 创建一个四元数
q = quat(1, 2, 3, 4);
% 计算四元数的共轭
q_conj = conj(q);
disp('四元数的共轭为:');
disp(q_conj);
```
#### 4.2 四元数的模运算
四元数的模是指四元数的实部平方和虚部平方之和的平方根。即对于一个四元数q=a+bi+cj+dk,其模记作|q|=sqrt(a^2 + b^2 + c^2 + d^2)。在Matlab中,可以通过norm(q)函数来计算四元数q的模。
下面是一个在Matlab中计算四元数模的示例代码:
```matlab
% 创建一个四元数
q = quat(1, 2, 3, 4);
% 计算四元数的模
q_norm = norm(q);
disp('四元数的模为:');
disp(q_norm);
```
#### 4.3 Matlab中计算四元数共轭和模的方法
在Matlab中,通过使用conj()函数来计算四元数的共轭,使用norm()函数来计算四元数的模,这两个操作是在四元数运算中经常会用到的。在实际应用中,可以灵活运用这两个函数来进行四元数的计算,以满足不同的需求。
# 5. 四元数的旋转和插值
在Matlab中,四元数可以被用来进行三维旋转操作以及插值计算,这在计算机图形学和动画领域有着广泛的应用。下面我们将介绍如何在Matlab中使用四元数进行旋转和插值计算。
#### 5.1 使用四元数进行三维旋转
在Matlab中,通过四元数进行三维旋转操作非常方便且高效。可以通过构建代表旋转的四元数,然后将其应用于需要进行旋转的向量或点上。下面是一个简单的示例代码:
```matlab
% 创建表示旋转的四元数
rotationQuaternion = quaternion(cos(pi/4), 0, sin(pi/4), 0);
% 创建表示需要旋转的向量
v = [1, 0, 0];
% 将向量转为四元数
vQuaternion = quaternion(v);
% 对向量进行旋转
rotatedVQuaternion = rotationQuaternion * vQuaternion * inv(rotationQuaternion);
% 将旋转后的四元数转为向量
rotatedV = rotatedVQuaternion.a
```
在上面的示例中,我们创建了一个表示绕y轴顺时针旋转45度的四元数`rotationQuaternion`,然后将向量`v = [1, 0, 0]`通过四元数进行旋转操作,最终得到了旋转后的向量`rotatedV`。
#### 5.2 四元数插值在Matlab中的应用
四元数插值是在动画领域中常用的技术,它可以平滑地插值出两个四元数之间的过渡状态,使得动画效果更加自然。在Matlab中,可以使用`interpQuaternion`函数来实现四元数的插值计算。下面是一个简单的示例代码:
```matlab
% 创建起始四元数
q1 = quaternion(cos(pi/4), sin(pi/6), sin(pi/8), sin(pi/10));
% 创建目标四元数
q2 = quaternion(sin(pi/8), cos(pi/10), sin(pi/4), sin(pi/6));
% 进行四元数插值计算
interpQ = interpQuaternion(q1, q2, 0.5);
% 显示插值结果
interpQ.a
```
在上面的示例中,我们创建了起始四元数`q1`和目标四元数`q2`,然后通过`interpQuaternion`函数在两者之间进行插值计算,并输出了插值得到的四元数`interpQ`。
#### 5.3 实例:利用四元数实现角度插值
我们可以结合四元数的插值来实现角度的平滑过渡。下面是一个示例代码,展示了如何利用四元数来实现角度的插值:
```matlab
% 创建起始角度
angle1 = pi/4;
% 创建目标角度
angle2 = pi/2;
% 将角度转换为四元数
q1 = quaternion(cos(angle1/2), 0, sin(angle1/2), 0);
q2 = quaternion(cos(angle2/2), 0, sin(angle2/2), 0);
% 进行四元数插值计算
interpQ = interpQuaternion(q1, q2, 0.5);
% 将插值得到的四元数转为角度
interpAngle = 2*atan2(norm(interpQ.v), interpQ.a)
```
在这个示例中,我们将起始角度和目标角度转换为四元数,然后利用四元数插值计算得到了两者之间的平滑过渡角度`interpAngle`。
通过以上示例,我们展示了在Matlab中如何利用四元数进行三维旋转和插值计算,使得动画效果更加出色和自然。
# 6. 常见问题与解决方法
四元数在计算机图形学和机器人学等领域中被广泛应用,但在实际使用中,我们可能会遇到一些常见问题,下面我们将介绍一些常见问题以及可能的解决方法。
#### 6.1 计算四元数时应注意的精度问题
在进行四元数运算时,由于浮点数精度限制,可能会导致计算结果出现误差,尤其是在连续进行多次运算时。为了避免精度问题,可以采用以下方法进行处理:
```python
# 示例代码
import numpy as np
# 定义四元数
q1 = np.quaternion(1, 1, 1, 1)
# 连续乘法运算
result = q1 * q1 * q1
# 使用normalize()函数进行归一化处理
result_normalized = result.normalized()
```
在实际使用中,可以在关键步骤对四元数进行归一化处理,以提高计算精度。
#### 6.2 如何在Matlab中优化四元数运算的性能
在处理大规模数据集或高频率运算时,优化四元数运算的性能至关重要。以下是一些建议的优化方法:
- 避免在循环中重复创建四元数变量,尽量复用已有变量。
- 使用向量化操作,减少循环运算。
- 考虑并行计算,利用Matlab中的并行计算功能(如parfor循环)提高运算效率。
#### 6.3 如何处理四元数的异常情况
在实际应用中,可能会遇到四元数除零、非法操作等异常情况。为了提高程序的稳定性,可以使用try-except语句进行异常处理,避免程序中断或计算错误。
```python
# 示例代码
try:
# 尝试进行四元数除法运算
result = q1 / q2
except ZeroDivisionError:
# 处理除零异常
print("除零异常:除数不能为零!")
except Exception as e:
# 处理其他异常
print("发生异常:", str(e))
```
通过有效的异常处理,可以使程序在遇到异常情况时能够 graceful 地处理,并给出相应的提示信息,提高用户体验。
以上是关于四元数在Matlab中常见问题的解决方法,希望对您在实际应用中有所帮助。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
这篇专栏着重介绍了如何利用Matlab中强大的数学计算能力,结合四元数来实现坐标系在三维空间中的旋转。文章涵盖了对四元数在三维空间中的表示的理解,Matlab中对四元数的基本操作方法,以及四元数与欧拉角之间的转换方法。此外,还探讨了四元数在计算机图形学中的重要性,以及在Matlab中使用Quaternion类的具体技巧。读者还可以学习如何利用四元数表示空间中的旋转和平移关系,掌握四元数的角速度表达与计算方法,以及在Matlab中优化四元数运算的技巧。通过本专栏,读者将能够全面了解四元数在三维空间旋转中的应用,以及如何在Matlab中高效地进行相关计算操作。
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
无线通信的黄金法则:CSMA_CA与CSMA_CD的比较及实战应用

# 摘要
本文系统地探讨了无线通信中两种重要的载波侦听与冲突解决机制:CSMA/CA(载波侦听多路访问/碰撞避免)和CSMA/CD(载波侦听多路访问/碰撞检测)。文中首先介绍了CSMA的基本原理及这两种协议的工作流程和优劣势,并通过对比分析,深入探讨了它们在不同网络类型中的适用性。文章进一步通
Go语言实战提升秘籍:Web开发入门到精通

# 摘要
Go语言因其简洁、高效以及强大的并发处理能力,在Web开发领域得到了广泛应用。本文从基础概念到高级技巧,全面介绍了Go语言Web开发的核心技术和实践方法。文章首先回顾了Go语言的基础知识,然后深入解析了Go语言的Web开发框架和并发模型。接下来,文章探讨了Go语言Web开发实践基础,包括RES
【监控与维护】:确保CentOS 7 NTP服务的时钟同步稳定性
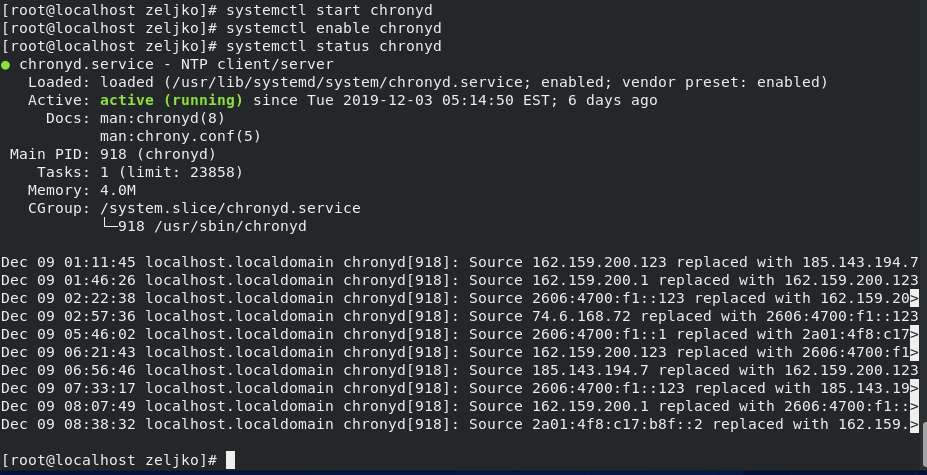
# 摘要
本文详细介绍了NTP(Network Time Protocol)服务的基本概念、作用以及在CentOS 7系统上的安装、配置和高级管理方法。文章首先概述了NTP服务的重要性及其对时间同步的作用,随后深入介绍了在CentOS 7上NTP服务的安装步骤、配置指南、启动验证,以及如何选择合适的时间服务器和进行性能优化。同时,本文还探讨了NTP服务在大规模环境中的应用,包括集
【5G网络故障诊断】:SCG辅站变更成功率优化案例全解析
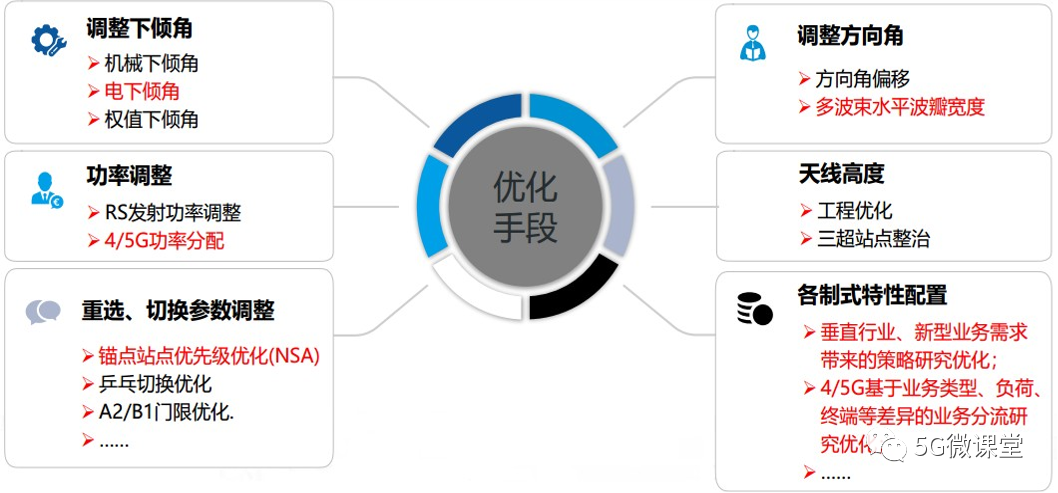
# 摘要
随着5G网络的广泛应用,SCG辅站作为重要组成部分,其变更成功率直接影响网络性能和用户体验。本文首先概述了5G网络及SCG辅站的理论基础,探讨了SCG辅站变更的技术原理、触发条件、流程以及影响成功率的因素,包括无线环境、核心网设备性能、用户设备兼容性等。随后,文章着重分析了SCG辅站变更成功率优化实践,包括数据分析评估、策略制定实施以及效果验证。此外,本文还介绍了5
PWSCF环境变量设置秘籍:系统识别PWSCF的关键配置

# 摘要
本文全面阐述了PWSCF环境变量的基础概念、设置方法、高级配置技巧以及实践应用案例。首先介绍了PWSCF环境变量的基本作用和配置的重要性。随后,详细讲解了用户级与系统级环境变量的配置方法,包括命令行和配置文件的使用,以及环境变量的验证和故障排查。接着,探讨了环境变量的高级配
掌握STM32:JTAG与SWD调试接口深度对比与选择指南
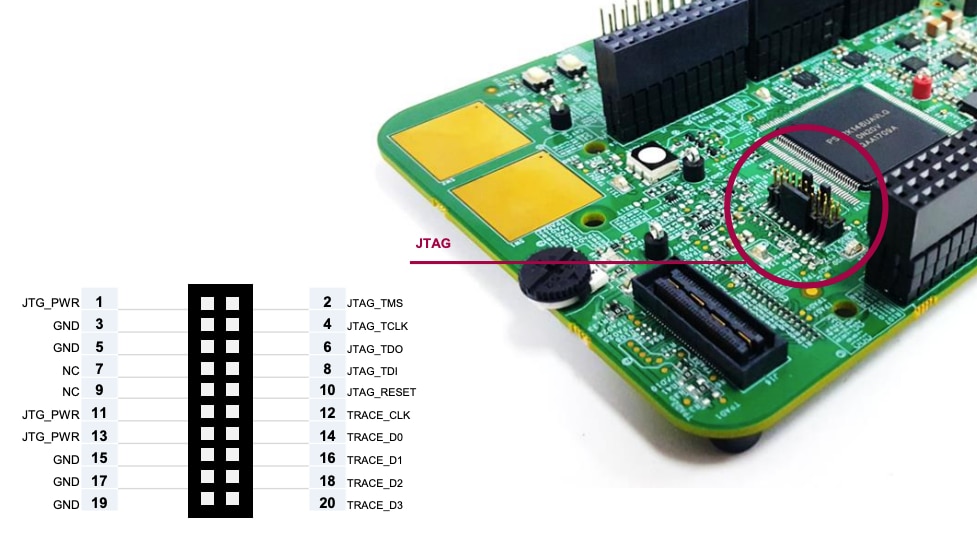
# 摘要
随着嵌入式系统的发展,调试接口作为硬件与软件沟通的重要桥梁,其重要性日益凸显。本文首先概述了调试接口的定义及其在开发过程中的关键作用。随后,分别详细分析了JTAG与SWD两种常见调试接口的工作原理、硬件实现以及软件调试流程。在此基础上,本文对比了JTAG与SWD接口在性能、硬件资源消耗和应用场景上的差异,并提出了针对STM32微控制器的调试接口选型建议。最后,本文探讨
ACARS社区交流:打造爱好者网络

# 摘要
ACARS社区作为一个专注于ACARS技术的交流平台,旨在促进相关技术的传播和应用。本文首先介绍了ACARS社区的概述与理念,阐述了其存在的意义和目标。随后,详细解析了ACARS的技术基础,包括系统架构、通信协议、消息格式、数据传输机制以及系统的安全性和认证流程。接着,本文具体说明了ACARS社区的搭
Paho MQTT消息传递机制详解:保证消息送达的关键因素
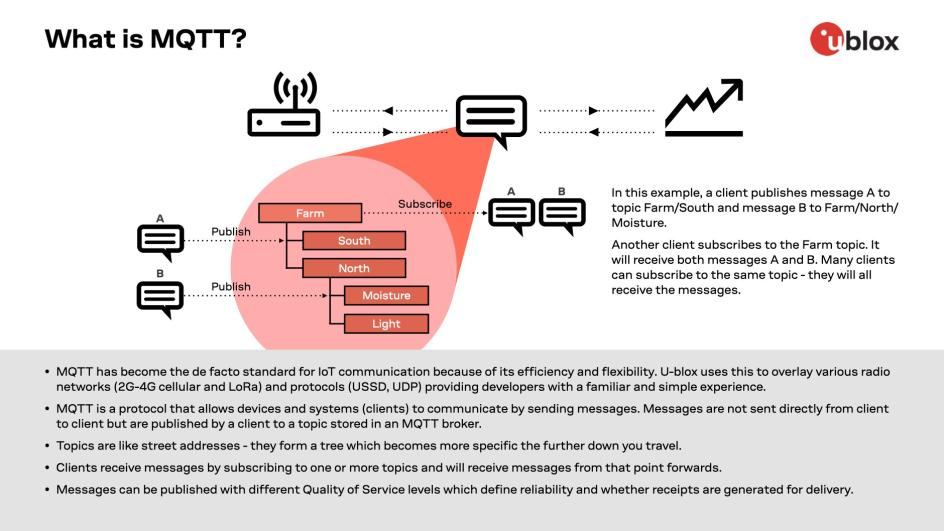
# 摘要
本文深入探讨了MQTT消息传递协议的核心概念、基础机制以及保证消息送达的关键因素。通过对MQTT的工作模式、QoS等级、连接和会话管理的解析,阐述了MQTT协议的高效消息传递能力。进一步分析了Paho MQTT客户端的性能优化、安全机制、故障排查和监控策略,并结合实践案例,如物联网应用和企业级集成,详细介绍了P
保护你的数据:揭秘微软文件共享协议的安全隐患及防护措施{安全篇

# 摘要
本文对微软文件共享协议进行了全面的探讨,从理论基础到安全漏洞,再到防御措施和实战演练,揭示了协议的工作原理、存在的安全威胁以及有效的防御技术。通过对安全漏洞实例的深入分析和对具体防御措施的讨论,本文提出了一个系统化的框架,旨在帮助IT专业人士理解和保护文件共享环境,确保网络数据的安全和完整性。最
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )