




工程实践指南:降阶龙伯格观测器实现细节及PMSM无传感器FOC案例

摘要
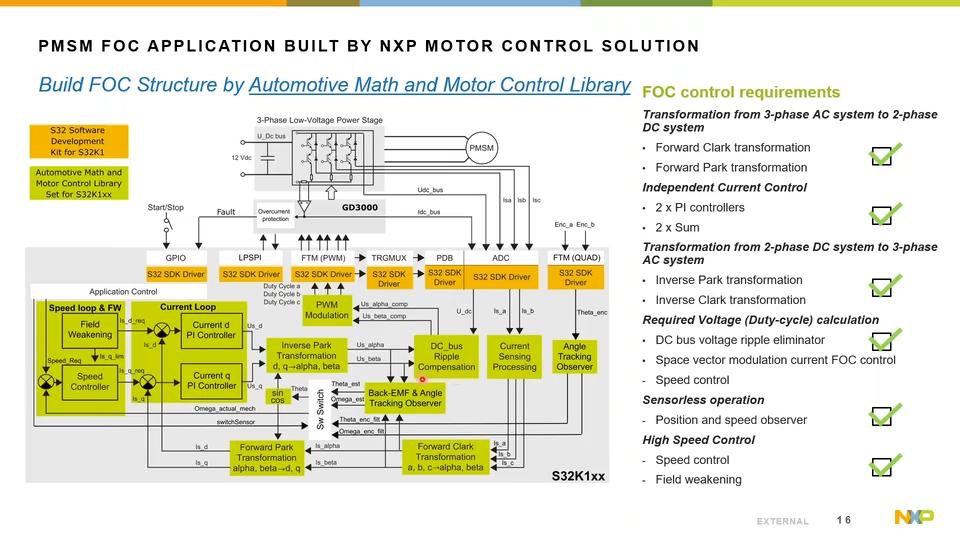
本文全面探讨了降阶龙伯格观测器的基础理论、设计实现及无传感器FOC(Field Oriented Control)技术的原理与应用。首先阐述了龙伯格观测器的工作原理和设计关键参数,并对数字化实现的误差和优化策略进行了分析。接着,文章深入讲解了无传感器FOC技术的关键要素和面临的技术难题,以及如何通过降阶方法提升算法性能。在此基础上,通过工程案例展示了PMSM(Permanent Magnet Synchronous Motor)无传感器FOC控制的实现,并对实验结果进行了详尽的评估与分析。最后,文章展望了未来的发展趋势,包括技术创新方向和无传感器技术在工业领域的应用前景,强调了持续创新对于产业升级的重要性。
关键字
降阶龙伯格观测器;无传感器FOC;矢量控制;硬件平台;软件框架;技术创新
参考资源链接:降阶龙伯格观测器驱动PMSM无传感器FOC实现详解
1. 降阶龙伯格观测器理论基础
在讨论降阶龙伯格观测器之前,理解其理论基础是至关重要的。龙伯格观测器是一种在控制系统中用来估计系统内部状态的技术,尤其在无法直接测量某些内部变量时显得尤为关键。它通过构建一个动态模型来模拟系统行为,此模型将基于输入和输出数据推断无法观察到的内部状态。观测器的一个重要特征是其能够准确地跟踪真实系统状态的变化,并在存在噪声和模型不确定性的情况下保持其性能。
2.1 龙伯格观测器的基本原理
2.1.1 观测器的工作原理
龙伯格观测器的工作基于误差修正机制。通过比较观测器输出与实际系统输出的差异,自动调整内部估计值以减小这种差异。这一过程通常涉及到一个反馈回路,使得观测器能够在动态环境中自我校正。观测器设计时,需要特别关注其稳定性和收敛性,以确保能够适应系统的各种变化。
2.1.2 观测器设计的关键参数
在设计一个龙伯格观测器时,关键参数的选择至关重要。这些参数包括增益矩阵,它们决定了系统误差的修正速度和幅度。选择合适的增益矩阵,可以确保观测器的快速响应和高准确度。在实际应用中,增益矩阵通常通过系统辨识和参数优化的方法得到。
2.2 数字实现中的挑战与优化
2.2.1 数字化过程中的误差分析
当龙伯格观测器由模拟环境转换为数字环境时,会出现量化误差和舍入误差等新的挑战。为了保证观测器的性能,必须对这些误差进行分析并采取相应的补偿措施。优化的策略可能包括采用高精度的数据表示格式或者改进算法结构以适应有限字长效应。
2.2.2 实现细节与优化策略
在实际的数字实现中,代码的效率和资源的使用也需关注。这可能包括选择适当的采样率、使用有效的数值算法来计算矩阵运算以及减少计算复杂度等。此外,针对特定应用场景的定制化优化,如利用并行处理或者硬件加速器来提升性能,也是提升龙伯格观测器性能的关键步骤。
2. 观测器的设计与实现
2.1 龙伯格观测器的基本原理
2.1.1 观测器的工作原理
龙伯格观测器(Luenberger Observer)是一种常用的反馈机制,通过构建一个动态系统,能够估计出系统内部状态,即使这些状态不可直接测量。在控制系统中,观测器能够帮助工程师监控和调整系统的性能,尤其是在面对非完整系统模型的情况下。龙伯格观测器的工作原理主要依赖于系统的输出与观测器估计值之间的差异,通过这种偏差来调整内部状态的估计值,使得估计值越来越接近真实值。
为了深入理解观测器的工作原理,必须先了解系统的动态模型,即系统矩阵和输出矩阵。在离散时间系统中,可以用下面的公式来表示:
[ x_{k+1} = A \cdot x_k + B \cdot u_k ] [ y_k = C \cdot x_k + D \cdot u_k ]
其中,( x_k )是状态向量,( u_k )是输入向量,( y_k )是输出向量,( A )、( B )、( C )和( D )是相应维数的矩阵。观测器的目的是通过输出( y_k )和已知的输入( u_k )来估计状态( x_k )。
2.1.2 观测器设计的关键参数
龙伯格观测器设计中的关键参数是观测器增益( L ),它决定了观测器动态特性的速度和稳定范围。增益( L )的选择对观测器性能有着决定性的影响。为了选择合适的( L ),需要利用极点配置技术,将观测器的极点放置在期望位置上,从而实现期望的动态响应。
通常,我们选择( L )使得观测器的极点比系统本身的极点具有更大的负实部。这样,观测器能够更快地收敛于真实状态。数学上,可以通过解代数黎卡提方程(Algebraic Riccati equation)来确定( L )。此过程通常需要仔细计算和反复试验,以确保观测器稳定且具有良好的性能。
2.2 数字实现中的挑战与优化
2.2.1 数字化过程中的误差分析
在将观测器从理论模型转为数字实现时,不可避免地会引入各种误差,包括量化误差、舍入误差和数值积分误差。量化误差是由于在数字系统中采用有限精度来表示数值而产生的误差;舍入误差通常出现在每次计算之后,数值结果会保留有限位数;而数值积分误差则发生在利用数值方法进行积分计算时。
为了尽可能减少这些误差的影响,我们需要在设计阶段就考虑到这些误差的来源,并在实现过程中采取相应的措施。例如,可以使用高精度的数值格式进行计算,增加计算的字长,或者采用误差补偿技术来抵消部分误差。
2.2.2 实现细节与优化策略
在数字实现观测器时,还需要关注实时性、计算效率和资源消耗。为了满足这些要求,就需要对实现过程进行优化。优化策略包括算法层面的优化,比如简化计算步骤、减少不必要的操作,以及利用硬件特性,比如并行计算和特殊指令集来加速计算。
下面是一段简化的龙伯格观测器的数字实现代码:
- // 假定已经定义好了矩阵A、B、C、L以及状态初始值x0
- float LuenbergerObserver(float u, float y) {
- // 更新状态估计值
- float x_estimated = A * x_estimated + B * u + L * (y - C * x_estimated);
- return x_estimated;
- }
在此代码中,我们可以看到一个直接的更新过程。但在实际应用中,对于浮点数的运算可能需要进行更细致的优化,比如,利用定点数进行计算以提高性能,或者应用SIMD指令进行并行计算提高效率。
2.3 降阶方法的理论解析
2.3.1 降阶方法的数学模型
在某些复杂的控制系统中,完全状态观测器可能会带来较高的计算成本,这时候可以采用降阶观测器来减少计算负担。降阶观测器的基本思想是,通过系统的某些属性,比如可控性和可观测性,来构造一个较小的状态空间模型。
数学上,这意味着将原始系统的状态空间模型划分为可控和不可控部分,或者是可观测和不可观测部分,然后仅对可控可观测部分进行状态估计。这可以借助到可控性矩阵和可观测性矩阵来完成。通过这些矩阵,我们可以找到一个降阶的状态空间模型,其特征与原始系统相同。
2.3.2 算法简化对性能的影响
虽然降阶观测器在计算上更加高效,但它也带来了性能上的妥协。最直接的影响是,降阶后的观测器可能无法完美地跟踪所有状态变量,尤其是那些在原始系统中非可控或非可观测的状态变量。这将导致在某些特定的条件下,观测器的性能不如同阶的观测器。
为了减少这些影响,工程师需要在降阶观测器设计时充分考虑系统的特性,确保重要的动态性能不受影响。此外,也需要利用高级算法来尽可能地恢复那些丢失的动态信息。例如,可以采用扩展卡尔曼滤波器(E

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
相关推荐
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )

专栏目录
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
戴尔笔记本BIOS语言设置:多语言界面和文档支持全面了解
【Arcmap空间参考系统】:掌握SHP文件坐标转换与地理纠正的完整策略
【VCS高可用案例篇】:深入剖析VCS高可用案例,提炼核心实施要点
【内存分配调试术】:使用malloc钩子追踪与解决内存问题
【精准测试】:确保分层数据流图准确性的完整测试方法
【T-Box能源管理】:智能化节电解决方案详解
ISO_IEC 27000-2018标准实施准备:风险评估与策略规划的综合指南
Cygwin系统监控指南:性能监控与资源管理的7大要点
Fluentd与日志驱动开发的协同效应:提升开发效率与系统监控的魔法配方


专栏目录
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )





















