Zynq图形界面开发教程:UG1144-PetaLinux工具的GUI支持全面解析
发布时间: 2024-12-25 00:15:10 阅读量: 7 订阅数: 4 
# 摘要
本论文详细介绍了Zynq与PetaLinux的集成与应用,从环境搭建到图形用户界面(GUI)设计的基础知识和实践开发。首先,阐述了PetaLinux的基本安装和配置流程,包括系统配置文件的解读、硬件抽象层(HAL)以及引导加载程序(Bootloader)的配置。其次,本论文探讨了Zynq平台GUI设计的核心原则、工具选择、以及编程基础。在深入实践部分,论文描述了基于PetaLinux的GUI开发流程,重点讲述了性能优化策略,以及如何实现高级图形界面特性,如触摸屏支持和多媒体集成。最后,通过对高级GUI应用的案例研究,验证了前述技术的应用效果,并分享了性能评估和开发经验。本文为在Zynq平台上进行高效、高性能GUI开发提供了全面的指导和参考。
# 关键字
Zynq; PetaLinux; GUI设计; 系统配置; 性能优化; 触摸屏驱动; 多媒体集成
参考资源链接:[PetaLinux工具指南:Zynq UG1144 PDF详解与升级教程](https://wenku.csdn.net/doc/64618755543f844488933e95?spm=1055.2635.3001.10343)
# 1. Zynq与PetaLinux简介
在现代电子系统设计中,Zynq是Xilinx公司推出的具有创新性的可编程片上系统(SoC),它将ARM处理器核心与FPGA逻辑紧密集成,在一个单一芯片上提供了处理器系统(PS)和可编程逻辑(PL)的无缝融合。这使得开发者能够利用处理器的灵活性和FPGA的并行处理能力来构建高度定制的系统。
PetaLinux是Xilinx提供的一个基于Linux的嵌入式开发平台,它能够简化Zynq系统的软件开发和部署过程。通过PetaLinux,开发者可以轻松地将Zynq上的软件环境搭建起来,为多种应用场景提供支持,包括但不限于图形用户界面(GUI)开发、网络服务、工业自动化等。
本章将对Zynq和PetaLinux的基本概念和优势进行介绍,为后续章节中详细介绍PetaLinux环境搭建、Zynq GUI设计和开发实践打下坚实的基础。
# 2. PetaLinux环境搭建与配置
## 2.1 PetaLinux安装流程
### 2.1.1 下载与安装PetaLinux工具
为了开发基于Xilinx Zynq平台的嵌入式Linux应用,开发者首先需要搭建PetaLinux开发环境。PetaLinux是Xilinx提供的一个完整的Linux开发套件,它为Zynq SoC提供了一个可定制的Linux操作系统。
安装PetaLinux的第一步是从Xilinx官网下载PetaLinux工具安装包。请注意,下载时需要一个有效的Xilinx账号。下载完成后,按照以下步骤进行安装:
1. 解压缩下载的安装包。
2. 运行安装脚本,通常名为`petalinux-v202X.X-final-installer.run`(其中`202X.X`是对应的年份和版本号)。
3. 在终端中执行安装命令,例如:
```bash
./petalinux-v202X.X-final-installer.run
```
4. 按照安装向导的提示完成安装。
安装过程中,系统可能会提示你同意许可协议,输入安装路径等信息。务必确保选择了正确的安装路径,以便后续能容易地访问到PetaLinux的安装目录。
安装完成之后,通过运行以下命令来验证PetaLinux的安装是否成功,并检查版本号:
```bash
petalinux-config -v
```
### 2.1.2 创建新的PetaLinux项目
创建一个新的PetaLinux项目是将Linux操作系统集成到Zynq平台上的第一步。以下是创建新项目的步骤:
1. 打开终端,并进入到你希望存放项目的工作目录。
2. 运行以下命令来创建新项目:
```bash
petalinux-create --type project --template zynq --name <project_name>
```
其中`<project_name>`是你的项目名称。
3. 进入项目目录:
```bash
cd <project_name>
```
4. 运行项目配置命令,为接下来的编译过程设置环境:
```bash
petalinux-config
```
5. 在配置菜单中,可以设置硬件描述(通过HDF),以及根据需求配置不同的系统参数,如网络、存储、内核参数等。
6. 完成配置后,使用以下命令开始编译过程:
```bash
petalinux-build
```
上述步骤将会根据你的配置生成一套适用于Zynq的Linux系统镜像。编译成功后,你可以在`images/linux/`目录下找到生成的镜像文件。
## 2.2 PetaLinux环境基础配置
### 2.2.1 系统配置文件解读
PetaLinux项目创建后,你需要熟悉和编辑项目中的几个关键配置文件,它们位于项目根目录下的`project-spec`文件夹内。这些文件包含了对于构建和运行PetaLinux系统至关重要的信息。
- `config.xml`:包含了PetaLinux项目的配置信息,诸如项目名称、版本、硬件平台选择等。
- `hdf.xml`:描述了Zynq SoC的硬件平台细节。这个文件是由Xilinx Vivado工具生成的硬件描述文件(.hdf)转换而来的。
- `rootfs_config`:配置了根文件系统(root filesystem)的详细信息,比如根文件系统的类型、大小以及软件包的选择。
在进行系统配置时,建议详细阅读每个文件中的注释,并根据项目需求进行适当修改。
### 2.2.2 硬件抽象层(HAL)配置
硬件抽象层(HAL)配置是确保Linux内核能够正确与Zynq硬件通信的关键。在PetaLinux中,这一配置主要涉及到内核配置以及设备树的设置。
- **内核配置**:通过运行`petalinux-config -c kernel`命令可以启动Linux内核的配置界面。在这里你可以启用或禁用各种内核选项,包括硬件驱动、文件系统等。
- **设备树(Device Tree)**:设备树文件(.dts或.dtb)提供了硬件的抽象描述,使Linux内核能够了解硬件的结构和资源。设备树文件位于`project-spec/meta-user/recipes-bsp/device-tree/files/`目录下。文件名通常是`system-user.dtsi`。
理解并正确配置设备树是成功运行Linux系统的关键。例如,为外设如GPIO、UART、I2C等分配正确的物理和虚拟地址,配置中断等。
### 2.2.3 引导加载程序(Bootloader)配置
引导加载程序是系统上电后第一个运行的代码,负责初始化硬件设备并将操作系统加载到内存中。在PetaLinux中,最常使用的是Xilinx的U-Boot。
要配置U-Boot,你需要编辑`project-spec/meta-user/recipes-bsp/u-boot/u-boot-xlnx_git.bbappend`文件。这个文件允许你定制U-Boot的编译选项,并可以添加或修改U-Boot环境变量。
- **环境变量**:U-Boot环境变量定义了一系列操作,如启动参数、设备初始化脚本等。这些可以在U-Boot启动过程中被加载和执行。
要修改U-Boot的启动流程或增加特定的启动行为,可以修改`uEnv.txt`文件,该文件包含了一系列的U-Boot命令。这个文件一般位于Zynq板上的一个可访问的分区,比如SD卡。
## 2.3 PetaLinux网络与存储配置
### 2.3.1 网络接口配置
网络接口的配置包括初始化网络接口以及设置网络连接的方式,如通过DHCP自动获取IP地址或配置静态IP地址。
在PetaLinux项目中,网络配置信息保存在`/etc/network/interfaces`文件中。编辑这个文件,你可以配置网络接口,如下例所示:
```shell
# The loopback network interface
auto lo
iface lo inet loopback
# The primary network interface
auto eth0
iface eth0 inet dhcp
```
在这个例子中,我们配置了本地回环接口`lo`以及物理网络接口`eth0`。`eth0`被设置为动态获取IP地址(使用DHCP)。要配置静态IP,可以将`dhcp`替换为`static`并添加IP地址、网关、DNS等信息。
### 2.3.2 存储解决方案集成
Zynq平台的PetaLinux项目支持多种存储解决方案,包括SD卡、NAND闪存、eMMC、甚至是通过网络的NFS挂载。
- **SD卡**:对于SD卡,通常在`uEnv.txt`

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以 Zynq C UG1144-PetaLinux 工具参考指南为基础,深入探讨 PetaLinux 在 Zynq SoC 开发中的应用。从入门到精通,专栏涵盖了七大秘诀,揭示 PetaLinux 的优化技巧,并深入理解 Zynq 与 PetaLinux 的接口技术。此外,还提供了设备驱动开发指南、软件开发流程详解、多媒体应用部署指南和图形界面开发教程,全面解析 PetaLinux 工具在 Zynq 上的实战应用,助力开发者掌握 Zynq 开发的精髓。
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Origin图表专家之路:坐标轴定制秘籍,5分钟提升图表档次
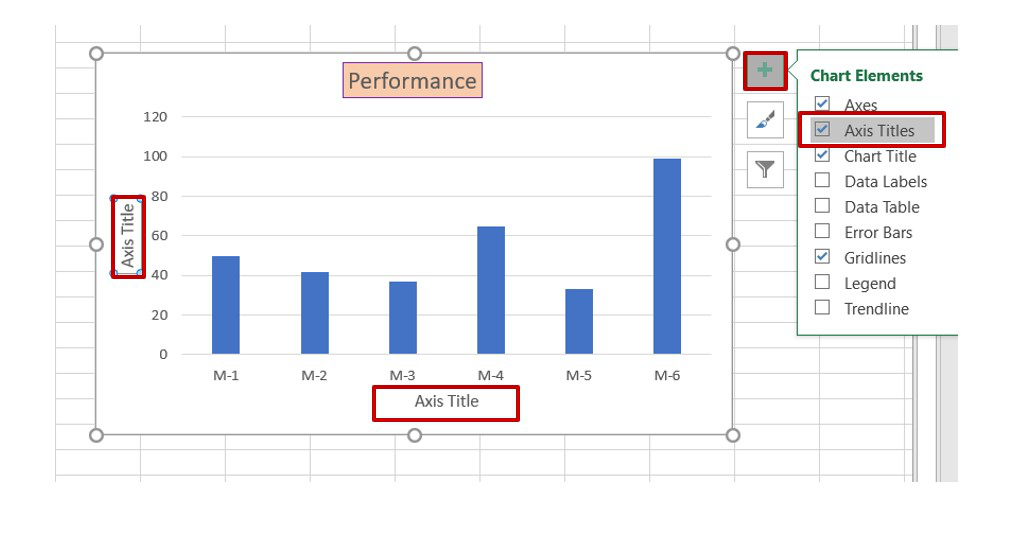
# 摘要
本论文系统回顾了Origin图表基础知识,深入探讨了坐标轴定制的理论基础,包括坐标轴元素解析、定制原则与设计以及高级定制技巧。通过实践操作章节,展示了如何打造定制化坐标轴,并详细介绍了基础操作、多轴图表创建与颜色及线型的定制。进阶技巧章节则聚焦于模板使用、编程化定制以及动态更新技术。最后,通过最佳实践案例分析,提供了科学研究和工程项目中坐标轴定制的实用范例
【WebSphere集群部署与管理】:构建企业级应用的高可用性秘诀
# 摘要
WebSphere集群作为一款成熟的商业应用服务器集群解决方案,为实现高可用性与负载均衡提供了强大的支持。本文旨在详细介绍WebSphere集群的基础架构和部署前的理论准备,通过分析集群组件和高可用性的基本原理,阐述集群部署的关键步骤及优化技巧。同时,我们探讨了集群的高级应用与管理,包括动态管理、自动化部署以及监控和日志分析的最佳实践。通过实际案例研究与行业应用分析,本文总结了WebSphere集群管理的最佳实践和未来发展趋势,以期为相关领域的研究与实践
DevExpress GridControl进阶技巧:列触发行选择的高效实现

# 摘要
本文深入探讨了DevExpress GridControl在应用程序中的应用与
Qt项目实践揭秘:云对象存储浏览器前端设计的5大要点

# 摘要
随着信息技术的发展,云存储已成为大数据时代的重要组成部分。本文首先介绍了Qt项目与云对象存储的基本概念,随后深入探讨Qt前端设计基础,包括框架核心概念、项目结构、模块化设计以及用户界面设计原则。在核心功能实现方面,文章详细说明了对象存储的RESTful API交互、文件管理界面设计及多租户支持和安全机制。接着,本文阐述了如何通过异步编程、事件驱动模型以及大数据量文件的处理策略来优化数据处理与展
LINQ查询操作全解:C#类库查询手册中的高级技巧
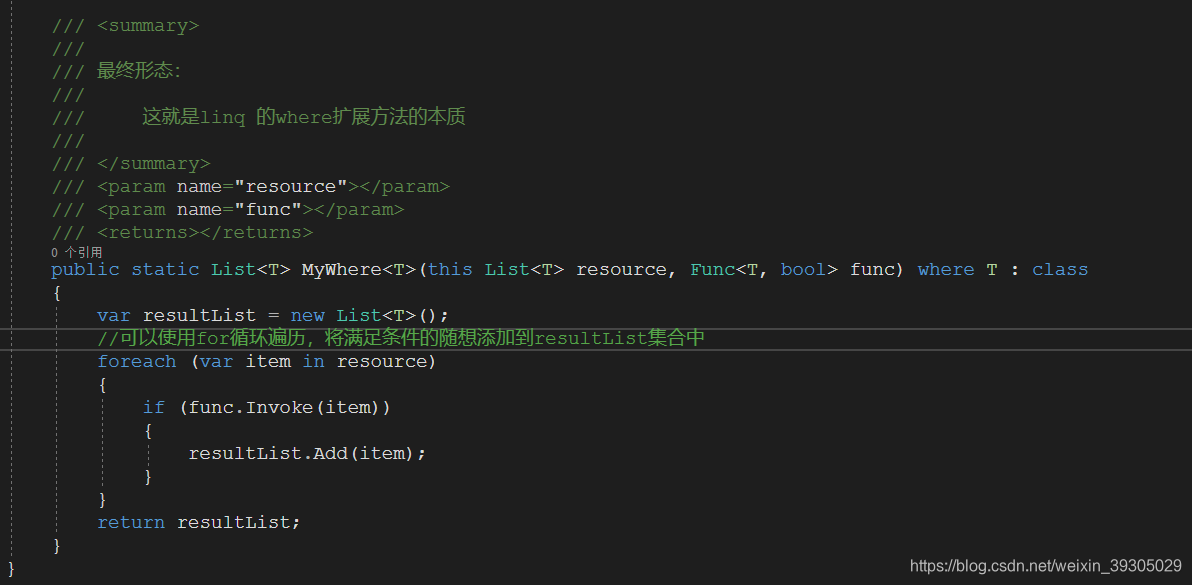
# 摘要
本文全面探讨了LINQ(语言集成查询)技术的基础知识、核心概念、操作类型、进阶技巧、实践应用以及在复杂场景和新兴技术中的应用。通过对LINQ查询表达式、核心操作类型以及与不
【SimVision-NC Verilog进阶篇】:专家级仿真与调试模式全面解析
# 摘要
本文详细介绍并分析了SimVision-NC Verilog仿真环境,探索了其在专家级仿真模式下的理论基础和高级调试技巧。文章从Verilog语法深入理解、仿真模型构建、时间控制和事件调度等方面展开,为仿真性能优化提供了代码优化技术和仿真环境配置策略。同时,探讨了仿真自动化与集成第三方工具的实践,包括自动化脚本编写、集成过程优化和CI/CD实施。综合案例分析部分将理论与实践结合,展示了S
案例分析:如何用PyEcharts提高业务数据报告的洞察力
# 摘要
PyEcharts是一个易于使用、功能丰富的Python图表库,它提供了多样化的图表类型和丰富的配置选项,使得用户能够轻松创建美观且交互性强的数据可视化报告。本文首先介绍PyEcharts的基本概念及其安装过程,然后深入探讨基础图表类型的应用、个性化配置和数据动态绑定方法。之后,本文将重点放在复杂图表的构建上,包括多轴、地图和
ADVISOR2002终极攻略:只需1小时,从新手到性能调优大师

# 摘要
本文全面介绍了ADVISOR2002软件的基础知识、操作技巧、高级功能、性能调优方法,以及其在不同领域的应用和未来发展趋势。第一章为ADVISOR2002提供了基础介绍和界面布局说明,第二章深入阐述了其性能指标和理论基础,第三章分享了具体的操作技巧和实战演练,第四章探讨了软件的高级功能和应用场景,第五章着重分析了性能调优的方法和策略,最后第六章展望了ADVISO
VisionMasterV3.0.0定制开发秘籍:如何根据需求打造专属功能
# 摘要
本文全面介绍了VisionMasterV3.0.0定制开发的全过程,涵盖需求分析、项目规划、系统架构设计、核心功能开发、高级功能定制技术以及测试与质量保证六个方面。通过深入理解用户需求,进行详细的项目规划与风险管理,本文展示了如何构建一个可扩展、可定制的系统架构,并通过实践案例展示了核心功能的定
【组合逻辑电路高级案例剖析】:深度解析复杂设计

# 摘要
组合逻辑电路是数字电路设计的核心组成部分,涵盖了从基本逻辑门到复杂功能电路的广泛领域。本文首先概述了组合逻辑电路的基本概念及其设计基础,强调了逻辑门的理解与应用,以及复杂逻辑函数的简化方法。随后,文章深入探讨
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )