YOLOv8的模型优化:提升目标检测速度与准确性的终极指南
发布时间: 2024-12-12 03:14:49 阅读量: 20 订阅数: 12 

实现SAR回波的BAQ压缩功能
# 1. YOLOv8模型简介与目标检测
YOLOv8是一种先进的实时目标检测系统,在计算机视觉领域中,目标检测技术是一项核心任务。目标检测不但要求模型能够精确识别出图像中的物体,而且还需要对物体的位置进行定位。YOLOv8继承了其前代模型YOLO系列(如YOLOv5, YOLOv7)的优良传统,通过卷积神经网络(CNN)的强大特征提取能力,实现了快速且准确的目标检测。
YOLOv8通过一种端到端的训练方式,简化了检测流程,降低了运行时间,同时保持了高准确率。它将目标检测分为两个主要步骤:特征提取和预测。特征提取部分采用深度卷积神经网络来学习图像的丰富表示,预测部分则是在特征图上应用一系列卷积层来完成边界框的定位和类别概率的计算。
目标检测的性能通常由精确度(mAP)和速度(FPS)来衡量。YOLOv8致力于在这两者之间寻找平衡,以期在不同的应用场合中达到最佳性能。对于实时性要求高的场景,如视频监控和自动驾驶,YOLOv8的表现尤为突出,能够在保证检测准确率的同时,达到足够高的帧率。
# 2. YOLOv8架构与关键特性分析
## 2.1 YOLOv8架构概览
YOLOv8,作为目标检测领域中的佼佼者,其架构设计旨在实现实时性和准确性之间的最佳平衡。在这一部分,我们将深入探讨YOLOv8的基本架构,包括它的主要组成部分以及这些部分是如何协同工作来实现目标检测的。
YOLOv8沿用了YOLO系列的“一次前向传播”(One Stage Detection)的设计理念。这使得YOLOv8能够在一个单独的神经网络中直接预测目标的类别概率和位置坐标,相较于传统的两阶段检测方法(如Faster R-CNN),YOLOv8在速度上具有明显的优势。
### 2.1.1 基本组件与工作流程
YOLOv8模型主要由以下几个组件构成:
- **输入层**:接收原始图像并进行预处理,如尺寸调整、归一化等操作。
- **骨干网络(B Backbone)**:用于提取图像特征的深度神经网络,如CSPDarknet。
- **检测头(Detection Head)**:在骨干网络提取的特征图上进行目标预测,包括类别概率、边界框坐标和置信度。
- **输出层**:输出最终的检测结果,通常为一系列边界框和对应的类别标签。
YOLOv8的工作流程主要可以分为三个阶段:
1. **特征提取**:通过骨干网络将输入图像转换为丰富的特征表示。
2. **目标预测**:利用检测头处理特征图,进行边界框和类别概率的预测。
3. **结果后处理**:将预测结果进行非极大值抑制(NMS)等后处理操作,以得到最终的检测结果。
### 2.1.2 骨干网络的选择与优化
YOLOv8在骨干网络的选择上不断进行探索与优化。最新的版本中,一个较为核心的变化是采用了更先进的CSPNet架构,以提高特征提取的效率并降低计算成本。
#### CSPNet架构的优势
CSPNet (Cross Stage Partial Network) 的引入,使得YOLOv8在不牺牲检测精度的情况下,实现了速度上的优化。CSPNet的核心思想在于将信息流在前向传播中分成两个部分:一部分直接与残差网络的输出相连接,而另一部分则通过一层转换层后再连接到残差网络中。这样不仅减少了计算量,而且有助于保留更多的特征信息。
### 2.1.3 检测头的创新
YOLOv8在检测头的设计上同样有所创新,引入了自适应特征池化(Adaptive Feature Pooling)机制。这种机制可以根据目标的大小动态地调整特征图的尺寸,从而在不同尺度的目标检测上取得更好的效果。
## 2.2 关键特性详解
YOLOv8的关键特性是其在速度和准确性之间取得平衡的核心所在。这一节将深入分析YOLOv8的关键特性,并讨论它们是如何提升模型性能的。
### 2.2.1 精度与速度的平衡
YOLOv8的设计重点之一就是实现精度与速度的平衡。这一平衡是通过以下方式实现的:
- **深度与宽度的调整**:通过微调网络深度(层数)和宽度(通道数)可以对模型的计算复杂度进行控制。
- **知识蒸馏**:使用预训练模型对YOLOv8进行知识蒸馏,将大型模型的知识迁移到小型模型中,以减少模型大小同时保持检测精度。
### 2.2.2 模型泛化能力
YOLOv8的另一个关键特性是其强大的泛化能力。该模型在不同的数据集上训练,并通过正则化技术如Dropout、Label Smoothing等避免过拟合,从而在未见过的数据上仍能保持良好的性能。
### 2.2.3 多尺度检测能力
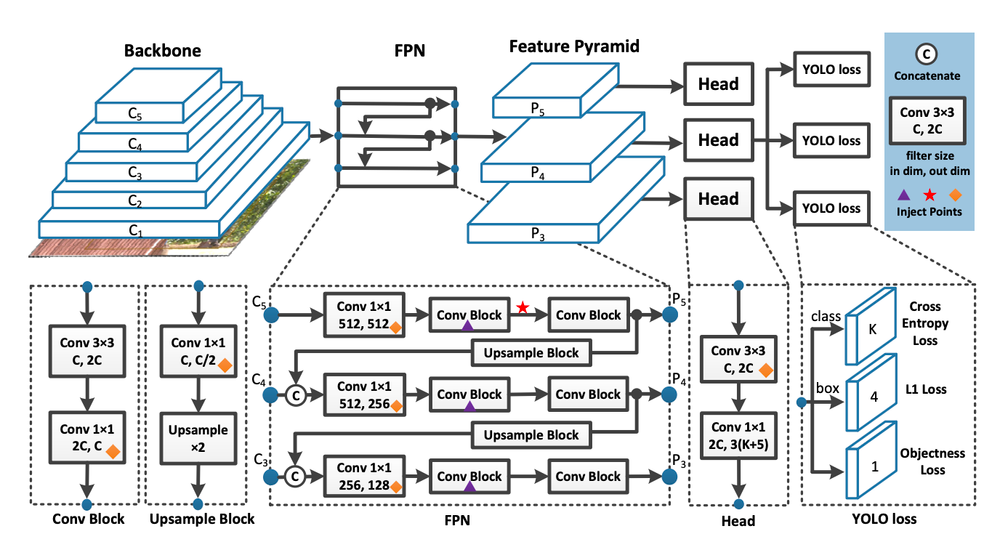
YOLOv8具备多尺度检测能力,使得模型可以更好地处理不同尺寸的目标。这一能力通过以下技术实现:
- **特征金字塔网络**:引入FPN结构来融合不同尺度的特征表示,使得模型在各个尺度上都能进行有效检测。
- **自适应锚框**:通过聚类分析等方法来生成与数据集自适应的锚框尺寸,确保在不同尺度上的目标都能被有效检测。
## 2.3 本章节总结
YOLOv8的架构和关键特性是其在实时目标检测领域中取得领先地位的重要原因。通过本章的介绍,我们已经了解了YOLOv8的基本架构和工作流程,并深入探讨了YOLOv8如何通过关键特性的创新实现精度和速度的双重提升。接下来的章节中,我们将关注YOLOv8模型的训练与参数调优,进一步了解如何获得一个性能更优的模型。
# 3. YOLOv8模型训练与参数调优
## 3.1 训练数据的准备和预处理
在目标检测任务中,数据的质量和准备工作的充分程度直接影响模型训练的效果。YOLOv8模型的训练同样需要高度重视数据处理的各个环节。
### 3.1.1 数据增强技术
数据增强是提高模型泛化能力的关键手段之一,它通过一系列变换对训练数据集进行扩充,使得模型能够学习到更为广泛和鲁棒的特征。
- **空间变换**:包括旋转、缩放、平移、翻转等,可以模拟目标在不同位置、角度和大小的情况。
- **颜色变换**:改变图片的亮度、对比度、饱和度等,以模拟不同的光照条件。
- **噪声注入**:在图像中添加噪声,使模型能够适应图像中的不规则干扰。
```python
from imgaug import augmenters as iaa
seq = iaa.Sequential([
iaa.Fliplr(0.5), # 水平翻转
iaa.Affine(scale={"x": (0.8, 1.2), "y": (0.8, 1.2)}), # 缩放变换
iaa.Add((-40, 40), per_channel=0.5), # 亮度调整
])
```
在上述代码块中,我们使用了`imgaug`库来实施多种数据增强技术。其中,`Fliplr`实现了水平翻转,`Affine`用于对图像进行缩放变换,而`Add`则改变了图像的亮度。每个操作都有一定的概率发生,这样可以在不同的增强效果之间产生变化。
### 3.1.2 标注工具和标准的制定
准确且一致的标注对于训练高性能的目标检测模型至关重要。这要求制定严格的标注标准,并使用高效的标注工具。
- **标注工具**:选择适合大量数据的标注工具,如LabelImg、CVAT、MakeSense.ai等。
- **标注标准**:应包含目标的边界框位置、类别、可能的属性(如姿势、方向)。
- **质量控制**:建立复审机制,确保标注的准确性和一致性。
```json
[
{
"image_path": "train/00000.jpg",
"bboxes": [
{"label": "car", "x_min": 30, "y_min": 50, "x_max": 70, "y_max": 110},
{"label": "pedestrian", "x_min": 150, "y_min": 180, "x_max": 190, "y_max": 220},
]
}
]
```
上述JSON格式的标注示例,包含了图像路径和边界框(bounding boxes)的详细信息。每个目标对象都有一个`label`字段定义类别,以及`x_min`、`y_min`、`x_max`、`y_max`定义的矩形边界框位置。
## 3.2 YOLOv8训练策略与调参技巧
### 3.2.1 学习率调度与优化器选择
在训练神经网络时,学习率和优化器的选择对模型的收敛速度和最终性能有着重要影响。
- **学习率调度**:采用如余弦退火、多阶段衰减等策略动态调整学习率。
- **优化器选择**:常见的有SGD、Adam、RMSprop等,各自有不同的优势和适用场景。
```python
from keras.optimizers import Adam
optimizer = Adam(lr=0.001, beta_1=0.9, beta_2=0.999, amsgrad=True)
```
上面的代码块展示了如何在Keras中配置Adam优化器。其中,`lr`参数设置学习率,`beta_1`和`beta_2`是指数衰减率,`amsgrad`是一个改进版本的Adam,它旨在改善收敛性能。
### 3.2.2 超参数调整与模型诊断
超参数的调整是通过反复实验找出最适合模型的参数配置。常见的超参数包括批大小、正则化强度、网络深度等。
- **批大小**:影响内存消耗和训练速度。
- **正则化**:通过L1、L2或Dropout减少过拟合。
- **模型诊断**:利用混淆矩阵、准确度曲线等工具诊断模型性能。
```python
from sklearn.metrics import confusion_matrix, ConfusionMatrixDisplay
# 假设真实标签和预测标签分别存储在true_labels和pred_labels中
cm = confusion_matrix(true_labels, pred_labels)
disp = ConfusionMatrixDisplay(confusion_matrix=cm)
disp.plot()
```
上述代码利用了scikit-learn库中的混淆矩阵工具来评估模型的分类性能。混淆矩阵提供了一个直观的方式来观察模型在各个类别上的表现,便于发现问题类别的预测情况。
## 3.3 模型训练的加速技术
### 3.3.1 GPU加速与分布式训练
GPU因其并行计算能力而成为深度学习模型训练的关键硬件。同时,分布式训练可以进一步加快训练过程。
- **单GPU训练**:适合大多数情况,特别是个人研究和开发。
- **多GPU分布式训练**:通过数据并行或模型并行,使得可以在多个GPU之间分配工作负载。
```python
import tensorflow as tf
strategy = tf.distribute.MirroredStrategy()
with strategy.scope():
model = build_yolov8_model()
model.compile(optimizer='adam', loss='categorical_crossentropy')
```
在上面的代码块中,使用了TensorFlow的`MirroredStrategy`进行多GPU训练。这允许在多个GPU之间复制模型和数据,并自动实现数据并行。
### 3.3.2 混合精度训练方法
混合精度训练结合了FP32和FP16的精度,可以在不牺牲模型准确性的情况下加速训练。
- **FP16计算**:更快的计算速度和更低的内存占用,但数值精度较低。
- **自动混合精度训练**:通过软件自动管理FP16和FP32之间的转换。
```python
from tensorflow.keras.mixed_precision import experimental as mixed_precision
policy = mixed_precision.Policy('mixed_float16')
mixed_precision.set_global_policy(policy)
```
这里使用了TensorFlow的混合精度API来设置全局精度策略,这样模型训练时就会利用FP16进行加速。
通过本章节的介绍,我们了解到YOLOv8模型训练和参数调优的各个环节,以及如何通过各种技术手段加速训练过程。下一章将深入探讨YOLOv8模型优化和推理加速的策略。
# 4. YOLOv8模型优化与推理加速
模型优化是深度学习领域一个持续不断演进的分支,YOLOv8作为当前非常先进的目标检测模型,其优化和推理加速技术至关重要。本章节我们将深入探讨YOLOv8的模型压缩技术、推理优化方法,以及模型部署和实时性提升的策略,这些内容对优化实际应用场景下的模型性能和提高模型的运行效率具有重大意义。
## 4.1 模型压缩技术
在部署深度学习模型时,尤其是目标检测模型,模型压缩技术是非常关键的一环。模型压缩可以减小模型的大小,降低计算复杂性,从而加快推理速度和提高实时性,同时减少对计算资源的依赖。
### 4.1.1 权重剪枝与量化
权重剪枝是一种常用的模型压缩技术,它通过移除神经网络中不重要的权重来减少模型大小。具体来说,权重剪枝可以分为结构化剪枝和非结构化剪枝。结构化剪枝主要针对的是整个卷积核或权重矩阵,而非结构化剪枝则会移除单个不重要的权重。
```python
# 示例代码:权重剪枝
import torch
import torch.nn.utils.prune as prune
# 假设 conv 是一个卷积层
conv = ...
# 应用结构化剪枝
prune.l1_unstructured(conv, name="weight", amount=0.2)
# 应用结构化剪枝,移除 20% 的权重
prune.remove(conv, "weight")
```
在上述代码中,我们首先对卷积层进行非结构化剪枝,然后移除剪枝后的权重。需要注意的是,模型剪枝后可能需要重新训练以恢复性能。
量化是一种将模型中的浮点数权重转换为较低精度(如int8)的技术。这样做可以减少模型的存储需求,并加速计算过程。
```python
# 示例代码:权重量化
model = ...
model.qconfig = torch.quantization.QConfig(activation=torch.quantization.default_observer, weight=torch.quantization.default_per_channel_weight_observer)
# 准备模型以进行量化感知训练
quantized_model = torch.quantization.prepare(model, inplace=False)
# 使用校准数据运行模型,校准是量化的一部分
calibration_data = ...
quantized_model(*calibration_data)
# 转换为具有8位权重和激活的模型
quantized_model = torch.quantization.convert(quantized_model, inplace=False)
```
通过上述代码,我们首先为模型设置了一个量化配置,然后准备模型以进行量化感知训练,最后转换模型为8位的量化模型。
### 4.1.2 知识蒸馏的应用
知识蒸馏是一种模型压缩技术,它通过转移一个大模型(教师模型)的知识到一个更小的模型(学生模型)来实现。这个过程通常涉及将软标签(来自教师模型的预测概率)和硬标签(真实标签)相结合,以指导学生模型的训练。
```python
# 示例代码:知识蒸馏
teacher_model = ...
student_model = ...
# 知识蒸馏训练函数
def distill_train_fn(student_model, teacher_model, data_loader, loss_fn):
for data, target in data_loader:
student_output = student_model(data)
teacher_output = teacher_model(data)
# 计算蒸馏损失
loss = loss_fn(student_output, target, teacher_output)
# 反向传播和优化
loss.backward()
optimizer.step()
# 假设 loss_fn 已经实现,data_loader 和 optimizer 已经准备就绪
```
在这个函数中,我们对数据进行前向传播,计算学生模型和教师模型的输出,并结合它们来计算蒸馏损失。接着通过反向传播和优化步骤训练学生模型。
## 4.2 模型推理优化方法
为了在不同的硬件平台上加速模型推理,开发者通常会使用硬件加速器,比如GPU、TPU,或专用的深度学习处理器(DSP)。此外,模型转换工具和框架优化也是提高推理性能的重要手段。
### 4.2.1 硬件加速器的使用
硬件加速器如GPU和TPU能够显著加速深度学习模型的运算,尤其在矩阵运算方面。为了充分利用这些硬件的潜力,开发者可以使用专门为硬件优化的深度学习框架,例如TensorFlow或PyTorch,并利用它们提供的GPU加速功能。
```python
# 示例代码:在PyTorch中启用GPU加速
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = ...
model.to(device)
# 在GPU上运行模型
data = ...
data = data.to(device)
output = model(data)
```
在上述代码中,我们检查了GPU是否可用,然后将模型和数据移动到GPU上。这样可以利用GPU进行快速矩阵运算。
### 4.2.2 模型转换工具与框架优化
模型转换工具如ONNX(Open Neural Network Exchange)可以将训练好的模型转换为不同深度学习框架之间通用的格式,从而便于在不同的推理引擎上运行。
```python
# 示例代码:使用ONNX将模型导出为通用格式
import onnx
model = ...
torch.onnx.export(model, data, "model.onnx")
```
通过使用ONNX导出模型,我们可以轻松地将模型转移到其他支持ONNX的推理引擎上,如TensorRT、OpenVINO或Core ML。
此外,深度学习框架通常提供了各自的优化工具,例如PyTorch的TorchScript和PyTorch JIT,它们可以优化模型图并减少运行时的开销。
## 4.3 模型部署与实时性提升
在模型部署阶段,需要考虑模型的实时性、占用的资源以及对应用场景的适应性。轻量化部署框架和实时检测系统的构建与测试是关键步骤。
### 4.3.1 轻量化部署框架的选择
为了在资源受限的设备上部署YOLOv8模型,需要选择一个轻量级的部署框架,如TensorRT、TFLite、Core ML等。这些框架都提供了模型优化和加速的功能。
### 4.3.2 实时检测系统的构建与测试
构建实时检测系统时,需要对YOLOv8进行针对性优化,比如通过量化、剪枝等技术减少计算量,同时保持准确性。此外,测试是验证部署效果的重要环节,可以通过指标如FPS(每秒帧数)来衡量模型的实时性能。
```python
# 示例代码:测试模型的实时性能
import time
model = ...
data = ...
start_time = time.time()
output = model(data)
time_elapsed = time.time() - start_time
fps = 1 / time_elapsed
print(f"FPS: {fps}")
```
上述代码中,我们计算了模型处理单个数据所需要的时间,并据此计算了FPS,即每秒可以处理的帧数。这是衡量模型实时性能的直观指标。
在接下来的部分,我们将进一步探讨YOLOv8在不同应用场景中的实际应用案例分析,看看这些优化技术是如何在现实世界中被应用和效果评估的。
# 5. YOLOv8实践应用案例分析
## 5.1 应用于工业检测的实例
### 5.1.1 工业视觉系统的集成与优化
在现代工业生产过程中,机器视觉系统已成为保证产品质量的关键技术之一。YOLOv8作为一个性能强大的目标检测模型,其在工业检测领域的应用变得日益普遍。为了将YOLOv8集成到现有的工业视觉系统中,需要对系统进行一系列优化。
首先,必须确保数据采集环节的准确性。高质量的图像数据是工业视觉系统的基础。YOLOv8模型训练时对图像质量有着严格要求,因此在实际应用中,需要对摄像头进行校准,确保拍摄到的图像清晰、分辨率高,并且具有良好的色彩还原性。
接着,对YOLOv8进行定制化调优以适应特定的工业检测需求。这包括但不限于对模型进行轻量化处理,使其可以部署在边缘计算设备上,并且在保持精度的同时尽可能地减少检测延迟。此外,由于工业场景的多样性和复杂性,可能需要进一步调整模型的参数,以适应不同的检测对象和背景条件。
在硬件集成方面,YOLOv8模型的部署应考虑实际的硬件资源。例如,在使用GPU进行推理加速时,需要根据具体的GPU型号选择合适的推理引擎和库,如TensorRT,以充分利用硬件特性。此外,对于实时性要求较高的场景,可以考虑使用FPGA等专用硬件加速器,以进一步提升检测速度。
### 5.1.2 定制化场景下的模型调整
在特定的工业检测场景中,标准的YOLOv8模型可能需要进一步的调整以满足特定的检测任务。这通常涉及到模型的微调过程,包括但不限于以下几点:
- **数据微调**:针对特定场景收集或合成新的训练样本,并对这些数据进行标注和预处理,以构建出更适合特定任务的数据集。
- **模型结构调整**:根据场景需求,可能需要添加或删除一些网络层,调整网络的宽度和深度,以及其它架构上的改变。
- **训练策略调整**:定制化的学习率调度策略、损失函数的选择和优化器的调整都可能对于提升模型在特定任务上的性能至关重要。
在进行这些调整时,一个有效的监控和评估机制也是不可或缺的。通过定期的模型评估,可以了解模型在新场景下的表现,并根据评估结果不断迭代改进。
## 5.2 应用于自动驾驶的实例
### 5.2.1 自动驾驶中的感知系统构建
在自动驾驶领域,感知系统是车辆理解周围环境的关键组件。YOLOv8作为实时目标检测算法的代表,已经成为许多自动驾驶系统感知层的重要组成部分。
构建一个以YOLOv8为基础的自动驾驶感知系统需要进行多方面的考虑。首先,必须对车辆周围的环境进行细致的感知任务分析。例如,车道线检测、交通标志识别、行人和车辆检测等都是自动驾驶系统所必需的。这要求YOLOv8模型不仅要能准确检测各类物体,还要能快速响应,以便于系统及时做出决策。
其次,为了确保自动驾驶系统的可靠性和安全性,必须对YOLOv8模型在各种复杂场景下的表现进行充分的测试。这包括不同光照条件、天气状况以及多种道路类型等。通过这些测试可以验证模型在真实世界环境中的稳健性。
### 5.2.2 YOLOv8在自动驾驶中的性能评估
YOLOv8模型在自动驾驶中的性能评估主要关注检测准确率、速度和鲁棒性。准确率决定了检测任务的可靠性,速度则直接关系到系统能否实时响应,而鲁棒性则保证了在不同环境和条件下检测的稳定性。
为了评估YOLOv8的性能,自动驾驶开发者通常会建立一套包含各种场景的测试集,这可能包括城市街道、高速公路、乡村小路等。每个场景都可能有不同的挑战,如车辆拥挤、交通复杂、视角遮挡等。
此外,实时性也是自动驾驶系统中的一个重要指标。在实际部署YOLOv8时,可能会采用多分辨率输入策略或模型压缩技术以满足实时处理的需求。另外,通过使用诸如TensorRT这样的推理优化工具,能够进一步提高YOLOv8在自动驾驶中的运行速度。
## 5.3 应用于视频监控的实例
### 5.3.1 视频监控系统的实时性要求
在视频监控领域,实时性是一个至关重要的性能指标。YOLOv8模型在这一领域的应用,必须确保可以快速且准确地处理视频流中的实时数据。
视频监控系统中的目标检测不仅要能够实时识别视频帧中的各类目标,还需要能够追踪目标物体的位置和移动路径。YOLOv8通过其快速的检测速度和较高的检测精度,能够很好地满足这一需求。
为了进一步提升实时性,通常会采用各种优化措施。例如,通过硬件加速技术,如GPU并行处理,可以显著提升检测速度。同时,使用混合精度训练(如FP16)能够在保持检测精度的同时减少计算资源的消耗。
此外,对于监控系统而言,YOLOv8还可以与其他算法或系统相结合,形成更为复杂的智能视频分析系统。例如,可以将YOLOv8检测到的结果与行为识别算法相结合,实现对特定行为的检测和预警。
### 5.3.2 YOLOv8在视频监控中的应用效果
在视频监控领域中,YOLOv8模型的实际应用效果主要体现在以下几个方面:
- **快速准确的目标检测**:YOLOv8能够在视频帧中快速准确地标记出所需检测的目标,如人、车辆或其他物体。
- **稳定高效的追踪**:结合跟踪算法,YOLOv8能够在连续的视频帧之间保持目标的一致性,有效地进行目标追踪。
- **智能分析能力**:通过集成深度学习模型,YOLOv8不仅限于检测,还可以对目标的行为模式进行分析,实现复杂场景下的智能监控。
在实际部署时,为了进一步提升系统的性能,可能需要针对监控现场的特定环境和条件对YOLOv8模型进行定制化调整。比如针对夜间或光线不足的环境,可以对模型进行特定的训练以优化在低光条件下的检测效果。
总之,YOLOv8在视频监控领域的应用效果显著,它为该领域带来了快速、准确的目标检测能力,并通过与跟踪和行为分析算法的结合,提高了整个视频监控系统的智能化水平。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《YOLOv8的模型微调与优化》专栏深入探讨了YOLOv8目标检测模型的优化和微调技术。从提升速度和准确性的终极指南到一站式全方位优化策略,专栏涵盖了模型优化、数据增强、迁移学习、超参数调整和正则化方法等各个方面。此外,专栏还提供了在不同场景下的应用分析、高级微调技巧、案例研究以及模型量化和二值化技术,帮助读者全面掌握YOLOv8模型的微调和优化方法,提升模型性能,解决实际问题。
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【RTCM 3.3协议的10大秘密】:精通实时定位技术的终极指南

参考资源链接:[RTCM 3.3协议详解:全球卫星导航系统差分服务最新标准](https://wenku.csdn.net/doc/7mrszjnfag?spm=1055.2635.3001.10343)
# 1. RTCM 3.3协议概述
RTCM 3.3是实时差分全球定位系统(GNSS
【深度学习的交通预测力量】:构建上海轨道交通2030的智能预测模型

参考资源链接:[上海轨道交通规划图2030版-高清](https://wenku.csdn.net/doc/647ff0fc
升级你的IS903:固件更新全攻略,提升性能与稳定性的终极指南

参考资源链接:[银灿IS903优盘完整的原理图](https://wenku.csdn.net/doc/6412b558be7fbd1778d42d25?spm=1055.2635.3001.10343)
# 1. IS903固件更新的必要性和好处
## 理解固件更新的重要性
固件更新,对于任何智能设备来说,都是一个关键的维护步骤。IS903作为一款高性能的设备,其固件更新不仅仅是为了修
ROST软件高级用户必看:全面掌握工具每一个细节的独家技巧
参考资源链接:[ROST内容挖掘系统V6用户手册:功能详解与操作指南](https://wenku.csdn.net/doc/5c20fd2fpo?spm=1055.2635.3001.10343)
# 1. ROST软件概述与安装指南
## ROST
【cx_Oracle权威指南】:版本升级、环境配置与最佳实践案例解析
参考资源链接:[cx_Oracle使用手册](https://wenku.csdn.net/doc/6476de87543f84448808af0d?spm=1055.2635.3001.10343)
# 1. cx_Oracle简介与历史回顾
cx_Oracle 是一个流行的 Python 扩展,用于访问 Oracle 数据库。它提供了一个接口,允许 Python 程序
ZMODEM vs XMODEM vs YMODEM:三者的优劣比较分析及选型建议

参考资源链接:[ZMODEM传输协议深度解析](https://wenku.csdn.net/doc/647162cdd12cbe7ec3ff9be7?spm=1055.2635.3001.10343)
# 1. ZMODEM、XMODEM与YMODEM协议概述
在现代数据通
ARINC664协议的可靠性与安全性:详细案例分析与实战应用

参考资源链接:[AFDX协议/ARINC664中文详解:飞机数据网络](https://wenku.csdn.net/doc/66azonqm6a?spm=1055.2635.3001.10343)
# 1. ARINC664协议概述
ARINC664协议,作为一种在航空电子系统中广泛应用的数据通信标准,已经成为现代飞机通信网络的核心技术之一。它不仅确保了
HEC-GeoHMS在洪水风险评估中的应用实战:案例分析与操作技巧
参考资源链接:[HEC-GeoHMS操作详析:ArcGIS准备至流域处理全流程](https://wenku.csdn.net/doc/4o9gso36xa?spm=1055.2635.3001.10343)
# 1. HEC-GeoHMS概述与洪水风险评估基础
## 1.1 HEC-GeoHMS简介
HEC-GeoHMS是一个强大的GIS工具,用于洪水风险评估和洪水模型的前期准备工作。它是HEC-HMS(Hydro
MIPI CSI-2信号传输精髓:时序图分析专家指南
参考资源链接:[mipi-CSI-2-标准规格书.pdf](https://wenku.csdn.net/doc/64701608d12cbe7ec3f6856a?spm=1055.2635.3001.10343)
# 1. MIPI CSI-2信号传输基础
MIPI CSI-2 (Mobile Industry Processor
【系统维护】创维E900 4K机顶盒:更新备份全攻略,保持最佳状态

参考资源链接:[创维E900 4K机顶盒快速配置指南](https://wenku.csdn.net/doc/645ee5ad543f844488898b04?spm=1055.2635.3001.10343)
# 1. 创维E900 4K机顶盒概述
## 简介
创维E900 4K机顶盒是一款集成了最新技术的家用多媒体设备,支持4K超高清视频播放和多
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )