深入Linux内核:精通进程管理与任务调度(习题与答案解析)
发布时间: 2025-01-04 09:58:04 阅读量: 10 订阅数: 10 

Linux内核结构与进程管理PPT课件.ppt
# 摘要
Linux内核的进程管理是操作系统核心功能之一,涉及进程的创建、调度、同步、通信以及性能监控等多个方面。本文详细介绍了Linux内核进程管理的基本理论,深入探讨了进程调度器的工作原理和策略,以及进程同步与通信机制。同时,本文提供了进程管理的实际应用案例,包括监控工具的使用、脚本编写以及调试与性能分析的方法。特别地,文中还探讨了进程管理在容器化技术和安全异常处理中的应用,分析了调度器性能优化策略以及Docker和Kubernetes环境下的进程管理挑战。通过本文的分析和实践指导,读者将能更全面地理解Linux内核进程管理的机制,并在实际工作中有效应用这些知识。
# 关键字
Linux内核;进程管理;进程调度;同步与通信;性能监控;容器化技术
参考资源链接:[Linux操作系统学习指南:习题与解答](https://wenku.csdn.net/doc/6498597c4ce2147568c7cf2b?spm=1055.2635.3001.10343)
# 1. Linux内核进程管理概述
Linux操作系统作为开源世界的重量级选手,一直以其稳定性和高效性在服务器和嵌入式市场占据重要地位。这一切的背后,离不开Linux内核中进程管理的强大支持。本章将对Linux内核中的进程管理机制做一个概览,为后续章节的深入探讨搭建基础。
Linux内核进程管理是操作系统核心功能之一,其主要职责包括进程的创建、调度、同步、通信以及回收等。这些功能确保了系统资源的合理分配和高效利用,是任何开发者或系统管理员在优化系统性能时不可或缺的知识点。
我们将从内核层面对进程的管理机制进行分析,探索Linux如何通过进程调度、同步和通信等手段,实现高效、稳定、安全的运行环境。通过理解这些概念,不仅可以提升系统的整体性能,还能在遇到系统瓶颈时,进行精确的问题定位和优化。接下来的章节将逐步深入,带你了解Linux内核进程管理的方方面面。
# 2. 进程管理基础理论
### 2.1 进程的概念与分类
#### 2.1.1 进程的定义与特征
在操作系统中,进程是程序的一次执行。进程不是一个简单的程序代码,它包含了程序代码、程序当前的活动以及程序的执行状态。一个进程通常具有以下特征:
- 动态性:进程是程序的一次执行,它具有生命周期,可以创建和终止。
- 并发性:多个进程可以在同一个处理器上并发执行,它们之间可以相互独立或相互协作。
- 独立性:每个进程都拥有自己独立的地址空间。
- 异步性:进程执行的顺序和速度是不可预知的,由操作系统的进程调度程序决定。
- 结构性:进程通常由程序、数据和进程控制块(PCB)组成。
#### 2.1.2 进程的状态与状态转换
进程在其生命周期中会经历多种状态,主要包括以下几种:
- 创建态(NEW):进程被创建时的初始状态。
- 就绪态(RUNNABLE):进程获得所有必要的资源,等待CPU分配。
- 运行态(RUNNING):进程正在处理器上执行。
- 阻塞态(BLOCKED):进程等待某个事件发生或资源分配。
- 终止态(terminated):进程执行完毕或因某种原因被终止。
进程的状态转换通常如下所示:
### 2.2 Linux进程描述符
#### 2.2.1 task_struct结构体分析
在Linux内核中,`task_struct`是进程描述符的核心数据结构,它定义在`<linux/sched.h>`中。这个结构体非常复杂,包含了进程控制信息、进程状态、进程标识符、进程调度信息、进程间通信信息等多个方面的信息。部分关键字段如下:
```c
struct task_struct {
volatile long state; // 进程状态
void *stack; // 进程的内核栈
atomic_t usage; // 引用计数器
unsigned int flags; // 标志位,比如PF_SWappable表示进程是否可以被换出
int prio, static_prio, normal_prio; // 优先级相关
struct list_head tasks; // 链表节点,用于链接进程
// ... 其他成员
};
```
#### 2.2.2 进程链表与队列管理
在Linux内核中,进程使用链表和队列来进行管理。每个进程的`task_struct`都通过链表连接在一起,可以快速遍历或查找特定的进程。这些链表和队列的组织结构,比如运行队列、等待队列等,是内核进行进程调度和管理的基础。
### 2.3 Linux进程的创建与终止
#### 2.3.1 fork()系统调用深入解析
`fork()`是Linux中用于创建新进程的系统调用。当一个进程调用`fork()`时,它会创建一个几乎完全相同的子进程,但子进程会获得一个不同的PID(进程标识符)。`fork()`系统调用背后使用了写时复制(copy-on-write,简称COW)技术,以减少内存使用。
以下是一个简单的`fork()`调用示例,以及其背后的逻辑:
```c
#include <stdio.h>
#include <sys/types.h>
#include <unistd.h>
int main() {
pid_t pid = fork();
if (pid == -1) {
// fork失败
perror("fork failed");
return 1;
} else if (pid == 0) {
// 子进程
printf("I am the child process, PID=%d\n", getpid());
} else {
// 父进程
printf("I am the parent process, PID=%d, child PID=%d\n", getpid(), pid);
}
return 0;
}
```
在执行`fork()`时,内核会复制当前进程的`task_struct`以及相关的资源,但是为了效率,所有的数据段、代码段都使用COW技术,只有当父子进程中的任一个尝试修改时,内核才会真正复制这些内存页。
#### 2.3.2 exec()系列函数及应用
`exec()`系列函数用于在当前进程的上下文中加载并执行新的程序,常与`fork()`配合使用来运行新程序。`exec()`函数族包括`execl()`, `execp()`, `execle()`, `execv()`, `execve()`等,它们在参数和使用方式上有所区别。
一个典型的使用`fork()`和`exec()`结合的例子是运行shell命令:
```c
#include <stdio.h>
#include <sys/types.h>
#include <unistd.h>
int main() {
pid_t pid = fork();
if (pid == -1) {
// fork失败
perror("fork failed");
return 1;
} else if (pid == 0) {
// 子进程
char *args[] = {"/bin/ls", "-l", NULL}; // 将要执行的命令和参数
execvp(args[0], args); // 执行/bin/ls -l命令
// 如果execvp执行失败,则返回子进程
perror("execvp failed");
return 1;
} else {
// 父进程
int status;
waitpid(pid, &status, 0); // 等待子进程结束
}
return 0;
}
```
#### 2.3.3 exit()和僵尸进程处理
`exit()`系统调用用于终止当前进程。它会向系统释放所有资源,并把进程状态设置为僵尸状态(ZOMBIE),直到其父进程通过`wait()`或`waitpid()`系统调用确认它的终止。
僵尸进程是已经结束但其父进程尚未回收子进程的PCB信息的进程。它们一般不会对系统造成危害,但如果数量过多会占用大量的PCB,导致系统无法创建新的进程。`wait()`和`waitpid()`系统调用的作用就是清理僵尸进程,获取子进程的退出状态。
以上就是对Linux进程管理基础理论的深入解析,理解这些概念和机制对于进一步学习Linux内核和进行系统编程都是非常重要的基础。
# 3. 进程调度核心机制
在现代操作系统中,进程调度是管理处理器资源和进程执行的核心机制,确保了系统的多任务处理能力以及应用的性能。Linux作为一个成熟的操作系统,其进程调度器经历了数十年的发展,不断地优化和演化,以适应日益复杂的系统需求。
## 3.1 Linux调度器概述
### 3.1.1 调度器的发展历程
Linux内核的调度器从早期的简单调度算法逐步演进到更为复杂的调度框架。最初的调度器仅支持时间片轮转(Round Robin)和优先级调度,虽然能够满足基本的多任务需求,但在面对大量进程和多样化的性能要求时显得力不从心。随着计算机科学的进步和Linux内核的发展,调度器经历了从2.4版本的O(1)调度器到2.6版本的完全公平调度器(Completely Fair Scheduler,CFS)的跨越,使得调度器变得更加高效和灵活。CFS调度器的设计目标是为每个进程提供公平的CPU时间分配,它基于虚拟运行时间的概念来决定下一个要运行的进程,从而优化了性能并减少了进程切换的开销。
### 3.1.2 调度器的核心组件
调度器的核心组件包括调度策略、调度实体、运行队列等。调度策略定义了进程如何被选择以及何时运行。Linux内核支持多种调度策略,其中包括实时策略(如SCHED_FIFO和SCHED_RR)和普通进程策略(如SCHED_OTHER)。调度实体(也称为任务)是需要进行调度的最小单位,在Linux中通常是一个进程或者线程。运行队列是调度器管理任务的容器,它维护着当前可运行的任务列表,并确保任务公平地分享处理器时间。
## 3.2 调度策略与优先级管理
### 3.2.1 传统调度算法
传统调度算法,如先来先服务(FCFS)和短作业优先(SJF)等,为计算机科学的发展提供了基础理论支持。Linux内核中虽然不直接采用这些传统算法,但它们在理解现代调度器设计时仍具有参考意义。例如,CFS调度器在设计上考虑了避免饥饿(starvation)和保证最小执行时间,这些都与传统算法的精神相一致。
### 3.2.2 CFS公平调度器与优先级计算
CFS通过引入虚拟运行时间来确保进程得到公平的调度。每个进程的虚拟运行时间是其实际运行时间的函数,这个函数考虑了进程优先级和nice值(一个影响进程调度优先级的参数,nice值的范围是-20到19)。nice值越低,进程越优先获得CPU时间。CFS并不是简单地按照nice值排序,而是使用了一种加权调度算法,使得调度器更加公平和动态。nice值和权重之间的转换公式涉及到了一些核心调度器参数,这些参数可以通过`/proc/sys/kernel/sched`虚拟文件系统进行调整。
## 3.3 实时调度策略
### 3.3.1 实时进程的特点
实时进程需要在规定的时间内完成任务,它们对时间的响应性有着严格要求。Linux内核支持两类实时调度策略:先进先出(FIFO,SCHED_FIFO)和轮转(Round Robin,SCHED_RR)。实时进程的特点是具有固定的优先级,并且一旦开始执行,除非自身阻塞或主动放弃CPU,否则不会被其他实时进程抢占。
### 3.3.2 SCHED_FIFO与SCHED_RR解析
SCHED_FIFO策略提供了一个无时间限制的实时任务执行环境,而SCHED_RR则在SCHED_FIFO的基础上增加了时间片的概念,使得实时任务可以在有限的时间内运行,之后进行上下文切换。SCHED_RR比SCHED_FIFO更加灵活,适用于不需要长时间占用CPU的实时任务。在实现上,SCHED_FIFO和SCHED_RR都要求程序员对任务的执行时间有较为准确的预估,以避免实时任务阻塞或饿死其他任务。Linux调度器通过`/proc/sys/kernel/sched_rt_period_us`和`/proc/sys/kernel/sched_rt_runtime_us`文件提供了实时调度策略的运行时间控制参数。
在本章节的介绍中,我们对Linux调度器的核心机制进行了深入的探讨,包括调度器的发展历程、调度策略与优先级管理,以及实时调度策略的具体实现。接下来,在下一章,我们将深入到进程同步与通信的细节,理解进程之间如何协同工作以及数据如何安全高效地共享。
# 4. 进程同步与通信
在Linux操作系统中,进程同步与通信是保证多个进程协同工作并保持数据一致性的核心机制。这一章节将深入探讨Linux内核中的同步机制和进程间通信的实现方式,以及如何通过这些机制进行内存管理和共享。
## 4.1 Linux内核同步机制
进程同步是指协调多个并发进程的工作顺序,以避免竞态条件和确保数据的一致性。Linux内核提供了一系列的同步机制,其中最常见的就是互斥锁和自旋锁。
### 4.1.1 互斥锁与自旋锁的区别与应用
互斥锁(Mutex)和自旋锁(Spinlock)是内核中最常用的同步原语。它们的主要区别在于等待获取锁时的行为:
- **互斥锁**:当一个进程试图获取已经被其他进程持有的互斥锁时,该进程会被阻塞,进入睡眠状态,直到锁被释放。这种方式在锁被持有的时间较长时较为合适,因为它可以节省CPU资源。
- **自旋锁**:自旋锁在锁被占用时,会持续检查锁的状态,即在原地"自旋",直到锁变得可用。这适用于锁被持有的时间非常短的情况,因为它避免了进程上下文切换的开销。
下面是一个使用互斥锁和自旋锁的简单代码示例:
```c
#include <stdio.h>
#include <pthread.h>
pthread_mutex_t mutex;
pthread_spinlock_t spinlock;
void* thread_mutex_function(void* arg) {
pthread_mutex_lock(&mutex);
printf("Thread with mutex acquired the lock\n");
// 模拟临界区
sleep(1);
pthread_mutex_unlock(&mutex);
return NULL;
}
void* thread_spin_function(void* arg) {
pthread_spin_lock(&spinlock);
printf("Thread with spinlock acquired the lock\n");
// 模拟临界区
sleep(1);
pthread_spin_unlock(&spinlock);
return NULL;
}
int main() {
pthread_t t1, t2;
pthread_mutex_init(&mutex, NULL);
pthread_spin_init(&spinlock, 0);
pthread_create(&t1, NULL, thread_mutex_function, NULL);
pthread_create(&t2, NULL, thread_spin_function, NULL);
pthread_join(t1, NULL);
pthread_join(t2, NULL);
pthread_mutex_destroy(&mutex);
pthread_spin_destroy(&spinlock);
return 0;
}
```
在这个示例中,两个线程分别尝试获取互斥锁和自旋锁。根据锁类型的不同,线程的行为也会有所区别。
### 4.1.2 信号量和条件变量的使用
信号量(Semaphore)和条件变量(Condition Variable)是两种功能更加强大的同步机制:
- **信号量**:可以看作是计数器,控制对共享资源的访问数量。它通常用于实现互斥访问和同步。
- **条件变量**:通常和互斥锁一起使用,允许线程在某个条件为真时挂起,直到其他线程通知条件发生变化。
以下是一个使用信号量和条件变量实现生产者-消费者模型的代码片段:
```c
#include <semaphore.h>
#include <pthread.h>
sem_t empty;
sem_t full;
pthread_mutex_t mutex;
pthread_cond_t cond;
void* producer(void* arg) {
while (1) {
sem_wait(&empty); // 等待有空位
pthread_mutex_lock(&mutex);
// 生产一个项目
pthread_cond_signal(&cond); // 通知消费者
pthread_mutex_unlock(&mutex);
}
}
void* consumer(void* arg) {
while (1) {
pthread_mutex_lock(&mutex);
sem_wait(&full); // 等待有产品
// 消费一个项目
sem_post(&empty); // 生产一个空位
pthread_mutex_unlock(&mutex);
pthread_cond_signal(&cond); // 通知生产者
}
}
int main() {
sem_init(&empty, 0, 10);
sem_init(&full, 0, 0);
pthread_mutex_init(&mutex, NULL);
pthread_cond_init(&cond, NULL);
pthread_t prod, cons;
pthread_create(&prod, NULL, producer, NULL);
pthread_create(&cons, NULL, consumer, NULL);
pthread_join(prod, NULL);
pthread_join(cons, NULL);
sem_destroy(&empty);
sem_destroy(&full);
pthread_mutex_destroy(&mutex);
pthread_cond_destroy(&cond);
return 0;
}
```
在这个示例中,生产者和消费者通过信号量和条件变量进行协作,保证了资源的互斥访问以及进程间的同步。
## 4.2 进程间通信(IPC)
进程间通信(IPC)是不同进程之间交换信息和数据的过程。Linux提供了多种IPC机制,每种机制都有其特定的使用场景和优缺点。
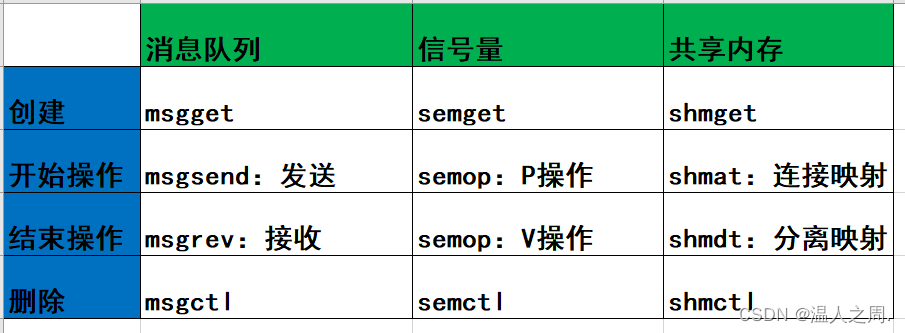
### 4.2.1 管道、消息队列、共享内存比较
- **管道(Pipe)**:最传统的IPC方式,用于具有父子关系或兄弟关系的进程间通信。管道是单向的,数据流是一次性的,读出即消失。
- **消息队列(Message Queue)**:一种更为灵活的IPC方式,允许不同进程读写消息。消息队列可以持久化存储在内核中,即使进程退出消息也不会丢失。
- **共享内存(Shared Memory)**:最快的一种IPC方式,它允许两个或多个进程共享一个给定的存储区。这种方式需要使用同步机制来保护共享资源,避免数据不一致。
下面是一个使用管道、消息队列和共享内存进行通信的示例代码:
```c
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
// 定义消息结构
struct msgbuf {
long mtype;
char mtext[100];
};
int main() {
int msg_id;
struct msgbuf message;
key_t key = ftok("msg_queue_key", 65);
// 创建消息队列
msg_id = msgget(key, 0666 | IPC_CREAT);
if (msg_id == -1) {
perror("msgget");
exit(1);
}
// 发送消息
strcpy(message.mtext, "Hello, this is a message");
message.mtype = 1;
if (msgsnd(msg_id, &message, sizeof(message.mtext) + sizeof(message.mtype), 0) == -1) {
perror("msgsnd");
exit(1);
}
// 接收消息
if (msgrcv(msg_id, &message, sizeof(message.mtext) + sizeof(message.mtype), 1, 0) == -1) {
perror("msgrcv");
exit(1);
}
printf("Received message: %s\n", message.mtext);
// 共享内存
int shm_id = shmget(IPC_PRIVATE, 1024, 0666 | IPC_CREAT);
char *str = (char*)shmat(shm_id, NULL, 0);
strcpy(str, "This is a shared memory message");
shmdt(str);
// 使用管道
int pipefd[2];
if (pipe(pipefd) == -1) {
perror("pipe");
exit(EXIT_FAILURE);
}
pid_t pid = fork();
if (pid == 0) {
// 子进程
close(pipefd[1]); // 关闭写端
char buf;
while (read(pipefd[0], &buf, 1) > 0) {
write(STDOUT_FILENO, &buf, 1);
}
write(STDOUT_FILENO, "\n", 1);
close(pipefd[0]);
_exit(EXIT_SUCCESS);
} else if (pid > 0) {
// 父进程
close(pipefd[0]); // 关闭读端
write(pipefd[1], "hello", 5);
close(pipefd[1]); // 关闭写端
wait(NULL); // 等待子进程结束
} else {
perror("fork");
exit(EXIT_FAILURE);
}
return 0;
}
```
在这个示例中,展示了如何使用三种不同的IPC机制:消息队列、共享内存和管道进行进程间通信。
### 4.2.2 套接字通信与网络IPC
Linux还提供了通过套接字(Sockets)的进程间通信方式。套接字不仅支持本地进程间的通信,还支持不同主机上的进程间通信。这使得基于套接字的IPC非常适合网络应用。
下面是一个简单的本地套接字通信示例:
```c
// 服务器端
int server_fd = socket(AF_UNIX, SOCK_STREAM, 0);
struct sockaddr_un server_addr;
server_addr.sun_family = AF_UNIX;
unlink("/tmp/unix.socket");
strcpy(server_addr.sun_path, "/tmp/unix.socket");
bind(server_fd, (struct sockaddr*)&server_addr, sizeof(server_addr));
listen(server_fd, 3);
int client_fd = accept(server_fd, NULL, NULL);
char buffer[100];
read(client_fd, buffer, sizeof(buffer));
printf("Server received: %s\n", buffer);
close(client_fd);
close(server_fd);
// 客户端
int client_fd = socket(AF_UNIX, SOCK_STREAM, 0);
struct sockaddr_un server_addr;
server_addr.sun_family = AF_UNIX;
strcpy(server_addr.sun_path, "/tmp/unix.socket");
connect(client_fd, (struct sockaddr*)&server_addr, sizeof(server_addr));
write(client_fd, "Hello, Server!", 15);
close(client_fd);
```
在这个示例中,服务器端创建了一个本地套接字,监听来自客户端的连接请求。客户端连接到服务器并发送一条消息,服务器端接收并打印这条消息。
## 4.3 内存管理与共享
Linux提供了高级的内存管理机制,其中copy-on-write机制、mm_struct和虚拟内存管理是重要的组成部分。
### 4.3.1 copy-on-write机制
copy-on-write(COW)是一种优化技术,允许父子进程共享同一块物理内存,直到其中一个进程试图写入数据为止。这时,系统只复制实际被写入的页面,而不是整个地址空间。这可以显著提高进程创建的效率,特别是在创建多个子进程时。
### 4.3.2 mm_struct与虚拟内存管理
在Linux内核中,mm_struct结构体用于描述进程的内存管理信息,包括虚拟内存区域(VMAs)、内存映射(mappings)等。虚拟内存管理允许进程在逻辑上看到比实际物理内存更多的内存空间,实现内存的按需分配和高效利用。
下面是一个查看进程内存映射的简单脚本:
```bash
#!/bin/bash
pid=$1
if [ -z "$pid" ]; then
echo "Usage: $0 <PID>"
exit 1
fi
pmap $pid | column -t
```
将此脚本保存为 `pmap.sh` 并赋予执行权限,可以查看指定进程的内存映射情况。
通过本章节的介绍,您了解了Linux内核中的进程同步机制、进程间通信方式和内存管理机制。这些知识对深入理解Linux系统进程管理至关重要,并为实际应用和性能优化打下了坚实的基础。
# 5. 进程管理实践
## 5.1 进程监控工具使用
在Linux系统管理中,能够有效地监控进程状态对于维护系统的稳定性和性能至关重要。本节将详细讨论使用top、htop等系统监控工具的方法,以及如何深入解析ps命令,以便更加精确地掌握进程运行情况。
### 5.1.1 top、htop等系统监控工具
`top`是一个动态实时查看系统进程和系统负载等信息的工具。启动top后,它将显示当前系统运行的进程列表以及一些系统统计信息。在top界面中,用户可以通过交互式的命令来进行进程管理,如结束进程、改变进程的优先级等。
`htop`是一个增强版的top工具,它提供了一个友好的用户界面和一些额外的功能,比如彩色显示、横向和纵向滚动进程列表、直接显示完整的命令行、父子进程关系等。
为了使用这些工具,您可以在终端中输入相应的命令:
```bash
top
```
或
```bash
htop
```
一旦运行,您将看到一个持续更新的列表,其中包含了系统中所有的进程以及一些关键的系统性能指标。在top中,您可以通过输入"u"来过滤特定用户的进程,或者输入"k"来杀死特定的进程。
### 5.1.2 ps命令深入解析
`ps`命令是用于查看当前系统中的进程快照的工具。ps命令有许多参数,使用不同的参数可以得到不同的输出结果。
下面的命令将列出所有当前用户的进程:
```bash
ps aux
```
在这里,`a`表示显示所有进程,`u`表示以用户为主的格式来显示进程信息,`x`则表示包括没有控制终端的进程。
如果我们需要监控一个特定进程,如nginx,我们可以使用`grep`来过滤输出:
```bash
ps aux | grep nginx
```
这会显示所有包含“nginx”的进程信息。请注意,这也会包含用于运行grep命令的进程本身。
下表将详细介绍一些常用的`ps`命令参数:
| 参数 | 描述 |
|------|------|
| a | 显示一个终端的所有进程,包括其他用户的进程 |
| x | 显示没有控制终端的进程,同时显示各个命令的具体路径 |
| u | 显示进程的详细信息,包括启动进程的用户名、进程的CPU和内存使用情况 |
| e | 显示进程的环境信息 |
| f | 显示进程的层次结构 |
| r | 只显示正在运行的进程 |
通过这些参数,我们能够根据需求获取不同粒度的进程信息,进而对系统性能进行分析和优化。
## 5.2 进程管理脚本编写
在Linux系统中,自动化管理进程是提高效率的重要手段。通过编写shell脚本,管理员可以执行复杂的任务序列,监控特定进程,并在需要时进行进程管理。
### 5.2.1 shell脚本监控特定进程
为了监控特定进程,我们可以编写一个简单的shell脚本,该脚本利用`ps`命令和`grep`来检测特定进程是否存在。下面是一个简单的例子:
```bash
#!/bin/bash
# 进程名称
PROCESS_NAME="nginx"
# 检查进程是否存在
ps -ef | grep $PROCESS_NAME | grep -v grep > /dev/null
# 如果进程不存在,则执行启动命令
if [ $? -ne 0 ]; then
echo "Process $PROCESS_NAME not found, starting now."
sudo service $PROCESS_NAME start
else
echo "Process $PROCESS_NAME is running."
fi
```
该脚本首先定义了要监控的进程名称,然后检查该进程是否存在。如果不存在,脚本将尝试启动该进程。这里使用`$?`变量来检查上一个命令的退出状态码,如果`grep`命令未找到进程,则退出码为非0。
### 5.2.2 使用脚本终止进程
有时需要根据特定条件终止进程,例如响应系统负载。下面的脚本将根据CPU使用率来终止特定进程:
```bash
#!/bin/bash
# 进程名称
PROCESS_NAME="java"
# CPU使用阈值
CPU_THRESHOLD=95
# 获取进程ID
PID=$(ps -ef | grep "$PROCESS_NAME" | grep -v grep | awk '{print $2}')
# 获取CPU使用率
CPU_USAGE=$(top -bn 1 | grep "$PID" | awk '{print $9}')
# 检查CPU使用率是否超过阈值
if (( $(echo "$CPU_USAGE > $CPU_THRESHOLD" | bc -l) )); then
echo "Killing $PROCESS_NAME with PID $PID due to high CPU usage."
kill -9 $PID
else
echo "CPU usage for $PROCESS_NAME is $CPU_USAGE%. No action needed."
fi
```
这个脚本首先获取指定进程的ID和CPU使用率。如果CPU使用率超过设定的阈值(这里设为95%),则使用`kill -9`命令强制终止该进程。这里使用`bc`命令来处理浮点数比较。
## 5.3 调试与性能分析
系统管理员常常需要调试和分析系统性能,以便诊断并解决系统运行缓慢或不稳定的问题。本节将介绍使用`strace`和`perf`这两个重要工具的方法。
### 5.3.1 strace跟踪系统调用
`strace`是一个强大的工具,可以用来跟踪和记录进程执行时的系统调用以及接收到的信号。这对于程序的调试、性能分析及理解程序运行原理非常有用。
要跟踪一个进程的系统调用,比如nginx服务器,可以使用如下命令:
```bash
strace -p `pidof nginx`
```
这将输出nginx进程的所有系统调用和信号信息。`pidof`命令用来查找nginx的进程ID。这有助于确定进程为何阻塞或者为何消耗大量资源。
### 5.3.2 perf工具进行性能分析
`perf`是Linux内核提供的性能分析工具,它可以用来分析程序运行期间的硬件事件,比如CPU周期、L1数据缓存命中率、分支预测命中率等。
使用`perf`来分析进程性能,可以采用以下命令:
```bash
perf stat -p 1234
```
这里,1234是进程ID。该命令将显示指定进程的统计信息,如执行的指令数、CPU周期数等。
更高级的用途是使用`perf record`命令来记录性能数据,然后使用`perf report`来分析这些数据。这可以帮助发现热点(hotspots)——程序执行最耗时的部分。
通过综合运用这些工具和方法,Linux系统管理员可以对进程进行高效管理、诊断系统性能问题,并实施针对性优化,以确保系统可靠、高效地运行。
# 6. 进程管理与调度的高级应用
在探讨了Linux内核的进程管理基础和调度核心机制之后,我们将进一步深入到进程管理的高级应用领域。这些内容对于希望提升系统性能、优化资源利用以及处理异常情况的IT专业人士来说,具有较高的实践价值。
## 6.1 调度器的性能优化
在现代的Linux系统中,调度器的性能直接影响系统的整体表现。调度器性能优化可以涉及到参数调整、系统架构优化等多个层面。
### 6.1.1 调度器参数调优
Linux内核调度器通过一系列的内核参数来控制其行为。通过合理地调整这些参数,可以达到优化调度性能的目的。例如,`kernel.sched_min_granularity_ns` 控制着最小时间片的长度,而 `kernel.sched_tunable_scaling` 可以用来调整调度器参数的缩放级别。调整这些参数需要根据实际的工作负载来进行,以避免过度优化带来的性能下降。
```bash
# 查看当前的调度器参数
sysctl kernel.sched_min_granularity_ns
# 调整调度器参数以优化性能(以root权限执行)
sysctl -w kernel.sched_min_granularity_ns=5000000
```
### 6.1.2 非均匀内存访问(NUMA)支持
随着服务器硬件的发展,NUMA架构已经变得越来越常见。这种架构下,每个CPU都有自己的本地内存,而访问远程内存的代价更高。调度器支持NUMA意味着能够更好地管理进程在NUMA节点间的分配,从而提升性能。例如,`numactl` 和 `taskset` 命令可以用来控制进程的NUMA策略。
```bash
# 查看当前系统的NUMA信息
numactl --hardware
# 通过numactl为进程指定内存节点
numactl --membind=0 --cpubind=0 command
```
## 6.2 容器化技术中的进程管理
容器化技术已经成为现代应用部署的主流方式。容器技术如Docker和Kubernetes在进程管理方面引入了新的机制。
### 6.2.1 Docker容器进程隔离机制
Docker利用Linux的cgroups和namespaces来实现容器内进程的隔离。通过cgroups,Docker限制容器可以使用的资源,如CPU、内存等。通过namespaces,Docker为容器提供独立的文件系统、网络等资源。容器内的进程几乎就像运行在一个独立的系统中。
```bash
# 查看Docker容器使用的cgroups限制
docker exec <container_id> cat /proc/1/cgroup
```
### 6.2.2 Kubernetes中的进程调度
Kubernetes作为容器编排的领导者,其调度器根据预定义的规则和资源请求来决定在哪个节点上运行容器。例如,它可以根据资源利用率、亲和性、反亲和性、污点和容忍度等因素来调度容器。了解和优化Kubernetes调度器的行为对于充分利用集群资源至关重要。
```yaml
# Kubernetes的Pod定义示例,其中包含资源请求和容忍度配置
apiVersion: v1
kind: Pod
metadata:
name: example-pod
spec:
containers:
- name: example-container
image: nginx
resources:
requests:
memory: "128Mi"
cpu: "100m"
tolerations:
- key: "example-key"
operator: "Exists"
effect: "NoSchedule"
```
## 6.3 安全与异常处理
随着系统复杂性的增加,进程管理的安全与异常处理变得越来越重要。
### 6.3.1 进程安全机制
Linux提供了一系列机制来确保进程运行的安全性。SELinux和AppArmor是两种常见的安全增强模块,它们通过限制进程能访问的资源来提升系统的安全性。除此之外,还有一种称为seccomp(secure computing mode)的安全特性,它允许进程定义过滤规则,以限制可以执行的系统调用。
```bash
# 启用seccomp来限制进程的系统调用
seccomp_export BPF_USER_SYSCALLS
seccomp perfil
```
### 6.3.2 异常进程和僵尸进程的处理策略
僵尸进程是已经结束的进程,但其父进程未能正确回收其资源。长时间运行的系统如果没有适当处理僵尸进程,资源最终会被耗尽。可以通过配置内核参数或编写脚本来定期清理僵尸进程,例如使用`SIGCHLD`信号来让父进程回收子进程资源。
```c
// 示例代码:在C程序中使用SIGCHLD信号处理僵尸进程
#include <signal.h>
#include <sys/wait.h>
#include <unistd.h>
void handle_zombie(int signum) {
while (waitpid(-1, NULL, WNOHANG) > 0) {
// 已经清理完毕
}
}
int main() {
signal(SIGCHLD, handle_zombie);
// ... 其他代码 ...
}
```
进程管理与调度的高级应用不仅要求理解相关的技术,还需要对系统架构和应用需求有深入的了解。以上内容仅为概述,实际操作时需要根据具体场景进行细致的分析和调整。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏提供了一系列关于 Linux 操作系统的深入教程和习题解答,涵盖了从内核管理和任务调度到文件系统优化、Shell 脚本开发、C/C++ 编程、软件包管理、高可用性集群架构、存储解决方案、负载均衡、硬件驱动维护、数据库服务、备份和恢复策略以及 Java 环境搭建等各个方面。通过详尽的讲解、习题练习和答案解析,本专栏旨在帮助读者全面掌握 Linux 操作系统的核心技术,提升其系统管理和开发能力。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
揭秘分布式系统:量化因子优化的5大实战技巧与案例分析
# 摘要
本文系统地探讨了分布式系统与量化因子优化的理论与实践,首先回顾了分布式系统的定义、特征、架构模式及其数据一致性与复制策略。接着深入分析了量化因子的概念、应用、优化策略和数学模型。在此基础上,针对分布式存储、计算和网络中的量化因子优化进行了详细论述,包括数据分布策略、任务调度、负载均衡等方面。文章还介绍了实战技巧,如因子分析、数据挖掘和机器学习在优化中的应用。最后,通过金融服务、电信运营和电商平台等行业的案例分析,展现了量化因子优化的成功实践和效果评估。整体而言,本文为分布式系统中的量化因子优化提供了全面的研究视角和解决方案。
# 关键字
分布式系统;量化因子;数据一致性;复制策略;
【替换规则优化】:掌握Replace和Regexp逻辑运算符的秘诀
# 摘要
替换规则优化是文本处理和模式匹配领域的关键技术,对于提高数据处理效率和精确度至关重要。本文首先探讨了替换规则优化的必要性及其广泛应用的场景。接着,深入分析了Replace逻辑运算符和Regexp正则表达式的原理与应用,包括它们在文本处理和模式匹配中的具体使用,以及各自的高级特性和优化策略。文章进一步阐述了Replace与Regexp协同工作的优势,结合实际案例分析了两者的性能考量。最后,讨论了高级替换规则构建的技巧,替换规则的调试与维护方法,并展望了替换规则优化的未来发展趋势及企业应用的挑战。本文旨在为开发者提供一系列替换规则优化的实用知识和先进工具,以应对日益复杂的数据处理需求。
【Ghost镜像制作新手必读】
# 摘要
本文全面介绍了Ghost镜像技术,包括Ghost软件的安装、界面介绍、系统备份镜像的创建、恢复与管理,以及进阶技术如分区与全盘镜像的选择、镜像压缩、网络传输和远程恢复。文章进一步探讨了在多系统环境下的镜像制作策略、常见故障下的镜像恢复、自动化与脚本化操作,以及优化Ghost操作效率和保障镜像安全性的重要性。最后,本文展望了Ghost技术的新兴发展和在企业级应用中的趋势,提供了深入的案例分析和策略建议。
# 关键字
Ghost镜像技术;系统备份;镜像恢复;网络传输;自动化脚本;安全性保障
参考资源链接:[使用大白菜PE制作Ghost镜像文件的步骤](https://wenku.cs
【嵌入式系统协同测试】:CANoe 10.0在软硬件测试中的应用
# 摘要
本文全面介绍了嵌入式系统的协同测试方法,重点阐述了CANoe 10.0软件在硬件和软件测试中的应用。通过详细解析CANoe 10.0的功能界面、测试模块配置、软硬件测试环境搭建以及实际案例分析,本文为读者提供了深入理解和掌握该软件的系统性指南。文章还探讨了测试用例设计、自动化实践、性能分析以及协同测试的高级应用和未来发展,旨在促进嵌入式系统测试的效率和精确度。
# 关键字
嵌入式系统;协同测试;CANoe 10.0;自动化测试;性能分析;测试用例设计
参考资源链接:[CANoe 10.0新手指南:快速上手工程配置与dbc加载](https://wenku.csdn.net/doc
MATLAB控制系统设计指南:掌握设计与分析的5个关键点
# 摘要
本文旨在全面概述MATLAB在控制系统领域中的应用,探讨了控制系统设计的基础理论,包括系统的分类、数学模型以及建模工具和方法。深入分析了MATLAB在控制系统设计和仿真方面的工具,如Simulink环境、PID控制器设计以及仿真技术等,并结合实践案例展示了MATLAB在系统建模、控制策略设计与优化中的应用。最后,本文还探讨了非线性控制系统、多变量控制系统设计以及利用智能算法优化控制系统的高级设计与分析方法。通过此论文,读者可以系统地了解MATLAB在控制工程中的作用和高级应用,为相关领域的研究与实践提供参考。
# 关键字
MATLAB;控制系统;Simulink;PID控制器;系统
RTL8306E软件开发秘籍:性能调优与故障排查全攻略
# 摘要
RTL8306E作为一款在软件开发中扮演重要角色的硬件设备,其硬件架构和软件接口设计对其性能和应用开发实践有直接影响。本文首先对RTL8306E的硬件架构进行详细解析,并探讨其与软件交互的方式。接着,文章重点介绍了如何通过不同的策略优化RTL8306E的性能,包括性能评估、代码级优化和系统级调整。针对常见的故障排查与调试,本文提供了实用的技术和工具。文章最后展望了RTL8306E在新兴技术中的应用前景和未来发展趋势。整篇文章为开发者提供了一个全面了解和利用RTL8306E的框架。
# 关键字
RTL8306E;硬件架构;软件接口;性能优化;故障排查;应用开发;物联网;人工智能
参
【Android Studio Gradle构建脚本深度剖析】:优化你项目的性能
# 摘要
本文全面介绍了Gradle构建脚本的概述、基础、高级特性以及在Android项目中的应用。首先概述了Gradle构建脚本的基本概念,包括项目和任务的概念,构建脚本的生命周期。随后,深入探讨了构建脚本中的依赖管理和插件应用,涵盖依赖解析过程、仓库配置以及插件的类型和自定义。在高级特性部分,分析了构建变体、任务依赖、规则以及属性和方法的使用。对于Android项目应用,本文详细阐述了特殊构建任务、多模块项目构建管理、性能优化和构建缓存。最后,讨论了Gradle脚本的自动化和最佳实践,包括自动化测试、脚本重构、模块化以及维护和文档编写。本文旨在为读者提供从基础知识到高级应用的完整Gradl
数据同步保障解决方案:基恩士与西门子设备PROFINET数据一致性方法
# 摘要
本文针对工业自动化领域中数据同步问题进行了系统的研究和分析。文章首先介绍了数据同步与保障的基础概念,随后分别探讨了基恩士和西门子设备在数据同步机制方面的具体实施细节,包括数据结构、通信协议、同步方案设计以及实践中的操作步骤和问题解决。接着,在PROFINET协议背景下,分析了数据一致性保障的理论基础与技术实现。此外,文章还深入讨论了数据同步的安全性与可靠性分析,提出了增强数据同步安全性和可靠性的策略。最后,展望了数据同步技术的未来发展趋势和面临的挑战,指出了相关技术和框架的改进方向。
# 关键字
数据同步;数据一致性;PROFINET协议;安全性分析;可靠性优化;工业自动化
参考
OBD2终端开发实战案例:SAEJ1979协议应用与实践

# 摘要
本文全面探讨了OBD2终端的开发基础知识、SAEJ1979协议详解、OBD2终端硬件与软件的准备、SAEJ1979协议在OBD2终端中的应用实践以及实战案例的分析与优化。首先,文章介绍了OBD2终端的定义、功能以及它在汽车诊断中的应用,并解释了OBD2终端的工作原理和通信协议。接着,深入解析了SAEJ1979协议的内容、
【单片机交通灯系统的无线通信技术应用】:探索与实践,无线技术的智能交通革命

# 摘要
本论文首先介绍了单片机交通灯系统的基本概念与需求分析,然后深入探讨了无线通信技术的基础、在交通系
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )