VL53L0X硬件连接与初始化教程:快速入门激光传感器
发布时间: 2025-01-10 13:25:05 阅读量: 10 订阅数: 8 

基于51单片机的VL53L0X激光测距模块驱动
# 摘要
VL53L0X激光传感器作为一种先进的距离测量设备,因其精确、快速的测距能力而广泛应用于多种场景。本文首先介绍了VL53L0X激光传感器的基本概念及其硬件接口,详细讨论了如何正确连接和配置硬件,以及选择适当的通信协议。随后,文章深入解析了初始化过程,包括硬件环境的检查、编程语言接口的使用和初始化代码的编写调试。在应用案例分析中,本文探讨了基本测量功能的实现、高级功能的探索以及如何将传感器集成到现有系统。最后,本文提供了一些使用技巧与维护策略,包括性能优化、故障诊断和传感器寿命管理,旨在帮助用户最大限度地发挥VL53L0X激光传感器的潜力。
# 关键字
VL53L0X;激光传感器;硬件连接;初始化过程;通信协议;集成应用;性能优化
参考资源链接:[VL53L0X激光传感器用户手册:API与校准指南](https://wenku.csdn.net/doc/5cu3v4bs1h?spm=1055.2635.3001.10343)
# 1. VL53L0X激光传感器简介
激光传感器在现代科技中扮演着重要的角色,特别是在精确距离测量领域。VL53L0X是STMicroelectronics推出的一款集成了激光发射器的飞行时间(ToF)传感器。它能够提供精确的远距离测量,且在各种光照条件下均能保持良好的性能。该传感器通过测量光往返目标所需的时间来计算距离,这一过程几乎不受目标颜色或反射率的影响。
在接下来的章节中,我们将详细介绍VL53L0X的硬件连接、初始化过程、实际应用案例以及使用和维护的技巧。通过这些内容,即便是经验丰富的开发者也能在将VL53L0X传感器集成到自己的项目中时获得帮助和启发。这不仅仅是一篇关于硬件的数据手册,更是一份充满实践指导的指南。
# 2. VL53L0X硬件连接
### 2.1 硬件接口分析
#### 2.1.1 接口类型和引脚分配
VL53L0X激光传感器提供了灵活的接口选项,主要支持I2C和GPIO通信方式。I2C接口是广泛使用的一种串行通信协议,允许在单一的总线上连接多个设备。而GPIO则是通用输入输出引脚,可以用于简单的数字信号输入输出。传感器的引脚配置如下:
- SCL:I2C通信时钟线
- SDA:I2C通信数据线
- XSHUT:传感器开启/关闭控制引脚,可以实现硬件复位功能
- GPIO1:用于其他功能的通用输入输出引脚
- GND:接地
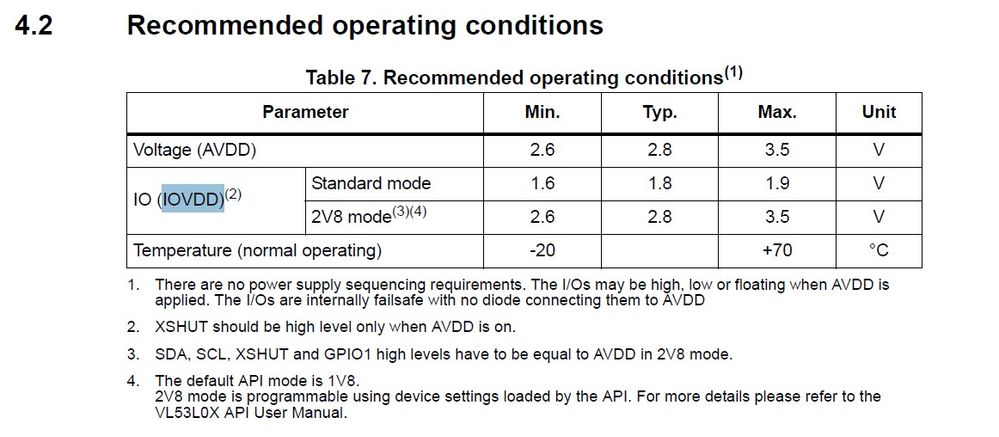
- VDD:供电,3.3V或5V
- VDDIO:I/O引脚供电,与VDD相同或独立于VDD的3.3V
引脚的分配需根据实际的硬件设计要求来确定,每个引脚的作用和连接方式在产品文档中都有详细说明。
#### 2.1.2 硬件连接步骤和注意事项
在连接VL53L0X传感器之前,请确保以下步骤已经完成:
1. **电源准备**:VL53L0X通常使用3.3V电源供电,所以请准备一个3.3V的电源。需要注意的是,传感器对电源的要求较高,建议使用低噪声的线性稳压器。
2. **连接I2C或GPIO**:根据项目需求选择合适的通信方式。如果使用I2C通信,确保SCL和SDA引脚分别与微控制器的I2C时钟和数据线相连。
3. **连接XSHUT引脚**:这个引脚用于控制传感器的开关。为了能够远程控制传感器,可以将此引脚连接到微控制器的一个GPIO引脚。
4. **连接GND和VDD**:将传感器的GND引脚连接到系统的地,VDD引脚连接到3.3V电源。
5. **检查引脚布局**:在连接之前,请仔细检查传感器和微控制器的引脚布局是否正确。可以使用电路板图或原理图来帮助检查。
注意事项:
- 避免在连接时将VDD和GND短路,这可能会损坏传感器。
- 连接完成后,请不要直接触摸传感器的引脚,以防止静电损坏。
- 如果在连接过程中遇到问题,请参考VL53L0X的数据手册或相关技术文档,以获取更详细的指导。
### 2.2 驱动和电源管理
#### 2.2.1 驱动的配置和安装
对于VL53L0X的驱动配置和安装,通常依赖于使用的操作系统和开发环境。以常见的Arduino开发板为例:
1. **安装Arduino核心库**:首先需要在Arduino IDE中安装VL53L0X的Arduino库,该库提供了与传感器通信所需的所有驱动。
2. **下载VL53L0X库**:可以从Arduino库管理器中搜索并安装VL53L0X库,或者从GitHub或其他代码托管平台下载库文件并手动安装。
3. **库文件集成**:将下载的库文件放置到Arduino安装目录下的`libraries`文件夹中。
4. **重启Arduino IDE**:安装完成后,重启Arduino IDE以加载新安装的库。
5. **示例代码测试**:打开Arduino IDE,尝试运行示例代码,确保能够成功编译并上传到开发板。
注意事项:
- 不同的微控制器和开发板可能需要不同的库文件和依赖项,确保下载适用于你的硬件的库。
- 安装库文件之前,建议阅读库文件的文档说明,了解其使用方法和限制。
#### 2.2.2 电源供给方案与稳定性
VL53L0X对电源的要求较高,因此需要一个稳定且干净的电源供给方案。下面是一些电源管理方面的建议:
1. **使用稳压器**:建议使用低噪声的线性稳压器来确保电源的稳定性,避免因为电压波动影响传感器的性能。
2. **电源滤波**:在传感器的电源输入端并联电容可以起到滤波的作用,进一步提升电源的稳定性。
3. **独立供电**:如果系统中存在其他高功率设备,可以考虑为VL53L0X提供一个独立的电源,以避免干扰。
4. **电压监控**:可以通过微控制器上的ADC(模拟数字转换器)来监控VL53L0X的供电电压,以确保供电稳定。
在设计电路时,务必按照数据手册中的推荐来设计电源部分,避免因为电源问题导致测量数据不准确或硬件损坏。
### 2.3 通信协议的选择
#### 2.3.1 I2C与SPI通信协议对比
在选择与VL53L0X通信的协议时,I2C和SPI是两种常见的选择。下面是两种协议的对比:
| 特性 | I2C | SPI |
| --- | --- | --- |
| **连接线** | 两条(SCL和SDA) | 四条(MOSI,MISO,SCK和CS) |
| **速度** | 较慢,通常不超过1Mbit/s | 较快,可达20Mbit/s以上 |
| **复杂性** | 简单,设备地址识别 | 较复杂,需要CS信号控制 |
| **设备数量** | 受地址限制,单主多从模式 | 受SPI总线数量限制,多主多从模式 |
| **功耗** | 较低 | 较高 |
#### 2.3.2 如何选择合适的通信协议
在选择通信协议时,应根据具体的应用场景和硬件条件来决定:
- **I2C协议**:适合于引脚数量有限、总线设备不多且对速度要求不高的场景。它简化了设备之间的连接和通信,但由于所有设备共享同一条总线,当设备数量增加时,通信冲突的风险也会增加。
- **SPI协议**:适合于需要高速数据传输和对数据传输时序要求较高的应用。SPI协议的缺点是需要更多的引脚,且需要妥善管理CS信号来选择活跃的从设备。
在实际应用中,考虑到VL53L0X传感器对数据传输速度和精度的要求,I2C协议通常是较为理想的选择。此外,VL53L0X的I2C地址可以根据需要通过软件或硬件方式更改,这也增加了应用的灵活性。
在进行硬件连接时,务必仔细阅读VL53L0X的数据手册,并根据手册的指导来正确配置通信协议的参数和引脚。这是确保传感器正确工作的重要步骤。
# 3. VL53L0X初始化过程详解
## 3.1 初始化前的准备工作
### 3.1.1 硬件环境检查
在编写初始化代码之前,首先需要确保VL53L0X激光传感器的硬件环境是就绪状态。这包括对传感器的物理连接进行检查,确保所有的引脚都已经正确连接到微控制器或开发板上,并且没有松动或接触不良的情况。同时,检查电源供应是否稳定,VL53L0X正常工作电压为2.8V,最大工作电流为20mA。
除此之外,考虑到环境因素,传感器周围不应有太强的光线干扰,避免影响到测量的准确度。传感器表面应保持清洁,无遮挡物。
### 3.1.2 开发环境和依赖库的配置
硬件准备就绪后,接下来需要设置软件开发环境。对于VL53L0X来说,通常会使用STM32、Arduino或其他微控制器平台。以Arduino平台为例,需要安装Arduino IDE,并且在IDE中安装对应微控制器的开发板管理器。
例如,如果使用的是STM32开发板,你需要下载STM32CubeMX工具来配置微控制器的参数,同时安装STM32的HAL库。对于依赖库的配置,可以使用VL53L0X官方提供的库文件,如Pololu提供的库,以及确保安装了所有必要的驱动。
## 3.2 编程语言接口
### 3.2.1 C/C++语言接口使用
VL53L0X的驱动通常会提供C或C++语言的接口。在Arduino平台上,库函数的使用非常简单,可以直接调用初始化函数,例如:
```cpp
VL53L0X sensor;
void setup() {
Wire.begin();
sensor.init();
sensor.setTimeout(500);
// 更多初始化设置...
}
void loop() {
// 测量距离并处理...
}
```
上述代码展示了如何在Arduino中初始化VL53L0X传感器。首先通过`Wire.begin()`初始化I2C接口,然后通过`sensor.init()`进行传感器的初始化设置,`sensor.setTimeout(500)`设置了测量的超时时间。
### 3.2.2 其他编程语言的接口支持
除C/C++之外,还有许多其他的编程语言或平台可以通过一定的封装提供对VL53L0X的支持。例如,在Python环境中,可以使用`pyvl53l0x`库进行操作。在Raspberry Pi上,可以通过`wiringpi`库与传感器通信。
## 3.3 初始化代码的编写与调试
### 3.3.1 初始化流程及代码示例
初始化VL53L0X的过程涉及多个步骤,包括设置测量模式、校准传感器、配置I2C接口等。下面是一个初始化流程的示例代码:
```cpp
#include "vl53l0x.h"
VL53L0X::VL53L0X() {
_io_timeout = vl53l0x::VL53L0X_DEFAULT_TIMEOUT;
_did_timeout = false;
}
bool VL53L0X::init() {
Wire.begin();
_io_timeout = vl53l0x::VL53L0X_DEFAULT_TIMEOUT;
_did_timeout = false;
VL53L0XSensor_init();
// 检查传感器版本
if (readReg16Bit(VL53L0X_REGidentification__model_id) != 0xEACC) {
return false;
}
// 系统组态
writeReg(VL53L0X_REGsystem__grouped_parameterHold, 0x01);
writeReg(VL53L0X_REGsystem__enable_refclk_mask, 0x01);
writeReg(VL53L0X_REGsystem__range_config_timeoutMicroseconds, 0x00, 0x01);
writeReg(VL53L0X_REGsystem__intermeasurement_period_ms, 0x09, 0x80);
writeReg(VL53L0X_REGsystem__grouped_parameterHold, 0x00);
// 光学组态
writeReg(VL53L0X_REGoehler__test_mode_active, 0x00);
writeReg(VL53L0X_REGoehler__mode, 0x00);
writeReg(VL53L0X_REGsystem__sequence_config, 0xFF);
return true;
}
```
### 3.3.2 常见问题与错误排查
初始化过程中可能会遇到一些问题,比如通信错误、超时等问题。通常,库函数会提供错误处理机制。例如,在上面的代码中,`_did_timeout`变量会在超时时被设置,可以通过检查这个变量来确定是否发生了超时。
在遇到问题时,首先要检查I2C通信是否正常工作,可以通过简单的I2C扫描程序来检查。其次,确保传感器的每个引脚都没有接错。最后,检查传感器的电源电压是否在允许的范围内,供电不足也会影响传感器的工作。
以上是对VL53L0X激光传感器初始化过程的详细解析。通过上述步骤,您可以为后续的应用和测量功能打下坚实的基础。接下来,我们将探讨如何通过VL53L0X实现各种测量功能。
# 4. VL53L0X应用案例分析
## 4.1 基本测量功能实现
### 4.1.1 距离测量的原理和实现
VL53L0X激光传感器通过飞行时间(Time-of-Flight,ToF)技术实现精确的距离测量。ToF技术涉及测量激光脉冲从发射到反射回来所需的时间,从而计算出目标物体的距离。传感器内部集成的VCSEL(Vertical Cavity Surface Emitting Laser)激光器发射出极短的脉冲光,这些脉冲光被物体反射回来后,传感器的SPAD(Single Photon Avalanche Diode)阵列捕捉这些反射光,并通过内部的处理电路计算光脉冲的飞行时间。
为了实现基本的距离测量功能,首先需要对VL53L0X进行初始化。初始化过程包括设置I2C地址、配置测量模式、启动距离测量等。测量模式可以设置为单次测量或者连续测量,以适应不同的应用场景需求。
下面的代码块展示了使用C++语言对VL53L0X进行初始化和读取距离数据的基本过程:
```cpp
#include "vl53l0x_api.h"
VL53L0X_Dev_t Dev;
// 初始化函数
VL53L0X_ERROR Status = VL53L0X_ERROR_NONE;
// 初始化
Status = VL53L0X_DataInit(&Dev);
if (Status != VL53L0X_ERROR_NONE)
{
// 错误处理
}
// 设置I2C地址
Status = VL53L0X_SetDeviceAddress(&Dev, 0x29); // 0x29是默认的I2C地址
if (Status != VL53L0X_ERROR_NONE)
{
// 错误处理
}
// 开始测量
Status = VL53L0X_StartMeasurement(&Dev);
if (Status != VL53L5X_ERROR_NONE)
{
// 错误处理
}
// 读取测量结果
VL53L0X_RangingMeasurementData_t RangingMeasurementData;
Status = VL53L0X_GetRangingMeasurementData(&Dev, &RangingMeasurementData);
if (Status != VL53L0X_ERROR_NONE)
{
// 错误处理
}
// 输出测量距离(单位:毫米)
printf("Distance: %d mm", RangingMeasurementData.RangeMilliMeter);
```
在上述代码中,通过`VL53L0X_DataInit`进行传感器数据初始化,`VL53L0X_SetDeviceAddress`设置设备的I2C地址,`VL53L0X_StartMeasurement`启动测量,`VL53L0X_GetRangingMeasurementData`获取测量结果。这些步骤是实现VL53L0X基本测量功能的关键。
### 4.1.2 实测数据的处理和输出
从VL53L0X获取到的数据通常需要经过适当的处理才能用于实际应用中。处理步骤可能包括转换数据格式、滤除异常值、应用平滑算法等。例如,传感器返回的距离值`RangeMilliMeter`是原始测量结果,直接使用可能会有噪声干扰。为了提高数据的可靠性,我们可以采用移动平均滤波器对连续多次测量结果进行平滑处理。
下面是一个简单的移动平均滤波器的实现示例,用于处理实测数据:
```cpp
#include <vector>
// 移动平均滤波器处理
float movingAverage(std::vector<float>& values, int windowSize)
{
float sum = 0;
for (int i = 0; i < windowSize; i++) {
sum += values[i];
}
float average = sum / windowSize;
for (int i = windowSize; i < values.size(); i++) {
sum = sum - values[i - windowSize] + values[i];
average = sum / windowSize;
}
return average;
}
// 使用示例
std::vector<float> rawMeasurements;
int windowSize = 5;
for (int i = 0; i < 10; i++) {
// 假设rawMeasurements[i]是第i次测量得到的原始距离值
float filteredValue = movingAverage(rawMeasurements, windowSize);
printf("Filtered Distance: %f mm\n", filteredValue);
}
```
在上述代码中,`movingAverage`函数通过滑动窗口计算平均值来实现数据平滑。窗口大小`windowSize`可以根据实际情况调整,以达到最佳的滤波效果。
## 4.2 高级功能探索
### 4.2.1 多目标检测
VL53L0X的高级功能之一是能够进行多目标检测。这意味着传感器可以在其视野范围内检测并返回多个目标物体的距离信息。这对于需要同时跟踪多个物体的应用场景来说非常有用,例如机器人避障、高度测量、智能监控等。
多目标检测功能的实现涉及对传感器的配置和数据读取方式的调整。要使用多目标检测,开发者需要将传感器设置为多区域模式。在多区域模式下,VL53L0X会将视野划分为多个区域,每个区域可以独立测量距离。开发者通过编程访问每个区域的测量结果。
下面是设置VL53L0X进行多目标检测并读取每个区域数据的示例代码:
```cpp
// 配置为多区域模式
VL53L0X_ClearInterruptAndStartRange(&Dev);
VL53L0X_ClearBuffer(&Dev);
// 开始多区域测量
Status = VL53L0X_StartMultiRanging(&Dev, 6); // 6是区域数量,最多支持16个区域
// 检查是否有多区域测量数据可用
if (Status == VL53L0X_ERROR_NONE)
{
VL53L0X_MultiRangingData_t MultiRangingData;
Status = VL53L0X_GetMultiRangingData(&Dev, &MultiRangingData);
if (Status == VL53L0X_ERROR_NONE)
{
for (int i = 0; i < MultiRangingData.NumberOfObjects; i++)
{
// 输出每个区域的距离数据
printf("Target %d Distance: %d mm\n", i, MultiRangingData.RangeMilliMeter[i]);
}
}
}
```
在上述代码中,`VL53L0X_StartMultiRanging`函数启动多区域测量,并传入区域数量。`VL53L0X_GetMultiRangingData`用于获取测量结果,其中`NumberOfObjects`是检测到的目标数量,`RangeMilliMeter`数组包含了每个区域的距离值。
### 4.2.2 物体识别与跟踪
除了检测距离,VL53L0X还能够配合其他传感器或算法实现物体识别与跟踪功能。物体识别通常依赖于高级算法,如计算机视觉技术,而VL53L0X可以提供关键的距离信息。在实现物体跟踪时,通常需要结合多个传感器的数据,例如使用摄像头获取图像信息,使用VL53L0X获取距离信息,然后通过图像处理和传感器融合算法实现对物体的准确识别和跟踪。
下面的表格展示了将VL53L0X与其他传感器结合使用实现物体识别与跟踪的一般步骤:
| 步骤 | 描述 |
| --- | --- |
| 1 | 安装并配置摄像头传感器和VL53L0X |
| 2 | 启动摄像头传感器获取图像数据 |
| 3 | 启动VL53L0X获取距离数据 |
| 4 | 使用图像处理算法识别图像中的物体 |
| 5 | 结合距离数据和图像信息进行物体定位 |
| 6 | 应用跟踪算法持续监测物体的位置变化 |
物体识别与跟踪是一个复杂的过程,涉及多个领域的知识和技术。开发人员需要具备相应的技能,才能实现一个完整的物体识别与跟踪系统。
## 4.3 集成到现有系统
### 4.3.1 与单片机/微控制器的集成
将VL53L0X集成到现有的单片机/微控制器系统中是一个常见的应用场景。比如,在智能家居、自动化机器人、工业控制等领域,开发者需要将距离传感器与特定的硬件平台结合,以实现各种自动化功能。
VL53L0X与单片机的接口一般采用I2C通信协议。在集成过程中,开发者需要连接VL53L0X的SCL和SDA引脚到单片机的I2C总线,并连接VDD和GND引脚以提供电源。然后通过编写控制代码,实现与VL53L0X的通信、数据读取和控制功能。
下面是一个与Arduino平台集成的示例代码:
```cpp
#include <Wire.h>
#include "vl53l0x.h"
VL53L0X sensor;
void setup()
{
Serial.begin(9600);
Wire.begin();
VL53L0X_ERROR Status = VL53L0X_init(&sensor, I2C_PULL_UP);
if (Status != VL53L0X_ERROR_NONE)
{
Serial.println("Failed to initialise sensor");
}
Status = VL53L0X_startContinuous(&sensor, 50); // 50ms更新周期
if (Status != VL53L0X_ERROR_NONE)
{
Serial.println("Failed to start continuous mode");
}
}
void loop()
{
VL53L0X_RangingMeasurementData_t RangingMeasurementData;
VL53L0X_performSingleRangingMeasurement(&sensor, &RangingMeasurementData);
if (RangingMeasurementData.RangeStatus != 4) // 4代表测量成功
{
Serial.print("Out of range: ");
}
else
{
Serial.print("Distance (mm): ");
Serial.println(RangingMeasurementData.RangeMilliMeter);
}
delay(1000);
}
```
在上述代码中,使用了`Wire.h`库与VL53L0X进行I2C通信,并通过`VL53L0X_init`和`VL53L0X_startContinuous`等函数启动传感器。在`loop()`函数中,`VL53L0X_performSingleRangingMeasurement`函数用于执行单次测量,并通过串口输出测量结果。
### 4.3.2 与PC或移动设备的集成
VL53L0X也可以集成到PC或移动设备上。PC平台通常通过USB转I2C适配器连接VL53L0X,而移动设备(如智能手机或平板电脑)则通过OTG接口与适配器连接。集成到这些平台的目的通常是为了实现更复杂的数据处理和用户交互。
在Windows平台上,可以使用NI-VISA或FTDI等库来实现与VL53L0X的通信。对于移动设备,可以使用相应的OTG通信库。在这些平台上集成VL53L0X后,可以开发出具有图形界面的应用程序,使用户能直观地看到测量结果,并进行进一步的分析和操作。
下面的mermaid流程图展示了VL53L0X与PC集成的一般步骤:
```mermaid
flowchart LR
A[启动PC应用程序] --> B[连接USB转I2C适配器]
B --> C[适配器连接到VL53L0X]
C --> D[应用程序初始化I2C通信]
D --> E[启动VL53L0X测量]
E --> F[应用程序读取测量数据]
F --> G[数据处理和展示]
```
在这个流程中,首先启动PC应用程序,并连接USB转I2C适配器。然后将适配器连接到VL53L0X传感器,初始化I2C通信。之后,启动传感器进行测量,并通过应用程序读取数据,最终进行数据处理和展示给用户。
# 5. VL53L0X使用技巧与维护
在前四章中,我们已经了解了VL53L0X激光传感器的硬件连接、初始化过程和基本应用案例。在这一章节中,我们将探索如何使用和维护VL53L0X以提高其性能,并确保其长期稳定工作。
## 5.1 性能优化技巧
VL53L0X传感器以其优越的测量精度和快速响应而著称。然而,为了确保其性能达到最佳,我们需要掌握一些技巧。
### 5.1.1 如何提高测量精度
提高VL53L0X的测量精度需要从硬件和软件两个方面着手:
- 硬件方面:
- 确保传感器清洁无遮挡,避免灰尘、油污等影响测量结果。
- 保证传感器与被测物体表面的距离在传感器的工作范围内(通常为5cm至120cm)。
- 选择合适的安装角度,减少反射和折射对测量精度的影响。
- 软件方面:
- 适当调整测量次数和时间间隔,以获得更稳定的读数。
- 使用卡尔曼滤波或其他数据平滑技术处理测量噪声。
示例代码片段:
```c
// 设置测量次数和间隔
VL53L0X_SetDistanceMode(&dev, 5); // 5回测量平均
VL53L0X_SetMeasurementTimingBudget(&dev, 200000); // 设置测量时间预算
```
### 5.1.2 提升响应速度的方法
如果响应速度成为瓶颈,可以尝试以下方法:
- 减少每次测量的超时时间。
- 使用中断方式读取数据,而不是轮询。
- 优化代码逻辑,减少不必要的处理。
代码示例:
```c
// 简化中断模式下数据读取过程
VL53L0X_StartMeasurement(&dev);
// 等待中断信号
while (!interrupt_received) { /* 等待 */ }
VL53L0X_ClearInterruptFlag(&dev);
distance = VL53L0X_GetDistance(&dev);
```
## 5.2 常见故障的诊断与解决
尽管VL53L0X传感器设计精良,但在实际应用中,故障是不可避免的。掌握一些基本的故障诊断方法对于维护和提升系统稳定性至关重要。
### 5.2.1 故障诊断流程
故障诊断可以从以下几个方面入手:
- 检查硬件连接是否松动或损坏。
- 使用传感器提供的调试命令检查其内部状态。
- 利用传感器的错误寄存器,找出故障原因。
### 5.2.2 常见问题的解决方案
- 问题:测量值异常
- 解决方法:检查传感器与被测物体的相对位置,以及传感器的工作范围。
- 问题:数据更新缓慢或停止
- 解决方法:增加测量时间预算,或者检查是否需要更新固件。
## 5.3 传感器的维护与寿命管理
适当的维护可以确保VL53L0X传感器的长期稳定运行。
### 5.3.1 日常维护的最佳实践
- 定期检查传感器的镜头和外壳,保持清洁。
- 使用传感器前确保供电电压稳定,避免频繁重启。
- 在非工作时间,将传感器置于防尘防潮的环境中。
### 5.3.2 延长使用寿命的策略
- 尽量避免在极端温度和湿度条件下使用传感器。
- 根据需要选择合适的防护等级的外壳,防止物理损伤。
- 关注传感器供应商的更新信息,及时更新固件以获得性能改进和功能增强。
通过以上分析,我们了解了如何使用VL53L0X激光传感器,并对其性能进行了优化。在实际工作中,应用这些技巧将帮助我们确保传感器可靠地运行,为我们的项目提供精确的距离和测量数据。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
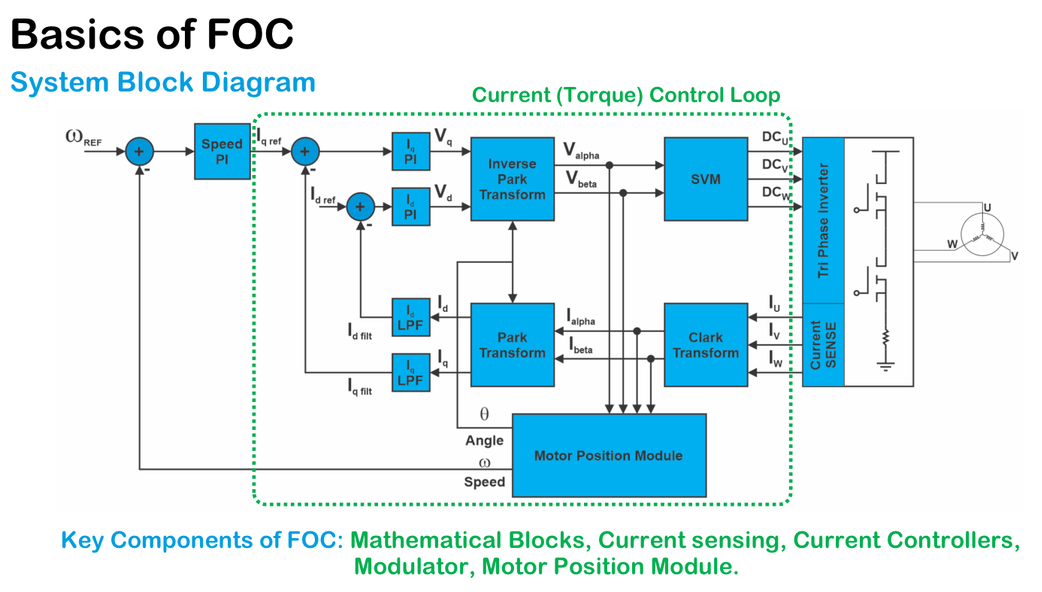
【无传感器FOC控制秘籍】:高精度无传感器电机控制的实现方法
# 摘要
无传感器矢量控制(FOC)是一种提高电机控制性能的技术,无需机械传感器即可准确控制电机。本文从基本原理出发,深入探讨了无传感器FOC控制的数学模型,包括电机控制的数学基础、状态观测器理论基础以及控制算法的数学描述。关键技术部分着重介绍了电机参数识别、状态观测器应用实践以及软硬件实现的限制和优化。通过实验验证
iPhone 6S传感器网络深度分析:智能设备感知系统的幕后

# 摘要
iPhone 6S传感器集合了一系列先进的传感技术,为用户提供强大的数据采集和交互体验。本文从概述开始,详细介绍了iPhone 6S中加速计、触摸传感器和环境光传感器的工作原理及其在智能手机中的具体应用。接着,文章探讨了传感器网络的实现,包括数据采集、传输、处理、融合以及网络控制和优化策略。通过具体的应用实例,分析了传感器网络在健康与运动监测、智
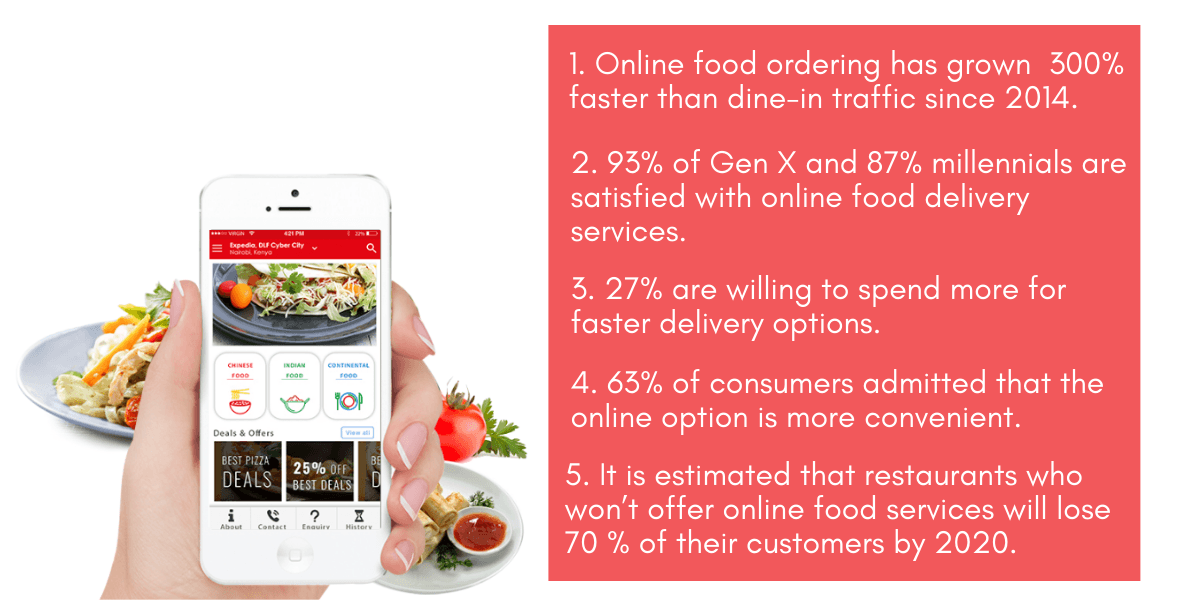
【软件工程秘籍】:网上订餐系统需求分析的7大关键点
# 摘要
本文针对网上订餐系统的需求分析进行了全面的探讨,重点分析了功能性需求和非功能性需求两个方面。通过细分用户界面与体验、订单管理、支付系统等关键功能需求,并讨论了系统性能、数据安全与隐私保护、可用性和可靠性等非功能性需求,本文旨在提出一套完善的网上订餐系统需求规范。文章还对需求获取、建模、验证和确认
Mentor Expedition高级应用速成:提升设计效率的10大技巧

# 摘要
本文对Mentor Expedition工具进行了全面介绍,详细阐述了高效设计流程的理论基础,并通过实例展示了该工具在实践中的应用技巧。文章首先概述了Me
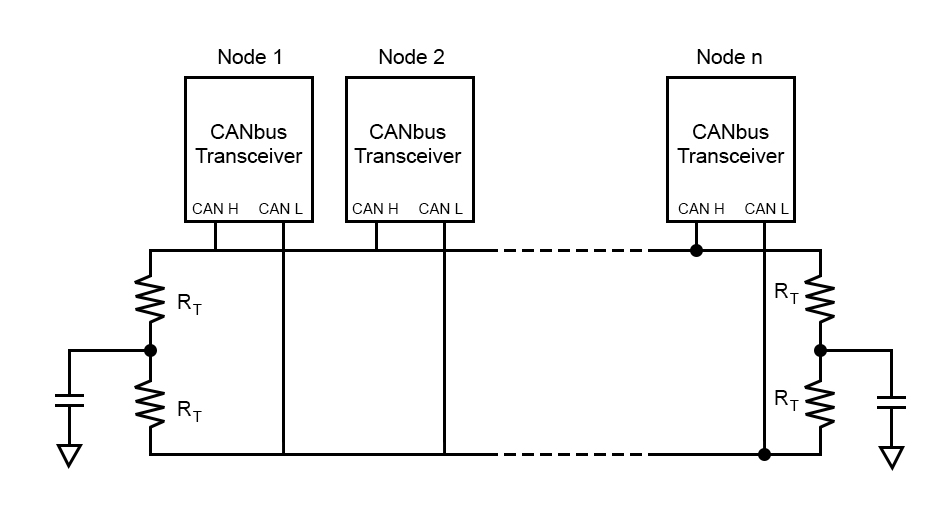
【性能对比】高速CAN vs 单线CAN:在物联网中的最佳实践
# 摘要
高速CAN与单线CAN作为物联网应用中的关键技术,各有其技术特点和优势。本文首先介绍了两者的理论基础和技术特点,包括它们的基本原理、架构、性能指标及其在不同场景下的应用。通过对比分析,本文探讨了高速CAN和单线CAN在数据传输速率、系统复杂度及成本效益方面的差异。同时,本文也呈现了这两种技术在物联网中的应用案例,并对其性能进行了测试与优化。考虑到物联网的安
ABAQUS多版本管理秘籍:高效共存一步搞定
# 摘要
随着工程计算软件ABAQUS版本的迭代更新,多版本共存成为学术研究与工业应用中不可忽视的挑战。本文旨在探讨多版本ABAQUS共存的重要性及所面临的挑战,并提供理论基础与实践指南。首先,文章分析了版本管理的目的和需求,讨论了不同版本间的功能差异及其兼容性问题,并提出了多版本共存的理论方案。随后,本文详细介绍安装和配置多版本ABAQUS的步骤,包括环境准备、安装流程和验证测试。此外,还探索了自动化脚
【Android 12.0 Launcher错误处理与日志分析】:诊断问题的利器
# 摘要
本文对Android 12.0 Launcher的性能和稳定性进行了全面分析。首先概览了最新版本Launcher的基本功能和特性。其次,深入探讨了错误处理机制,包括系统错误类型及其对Launcher的影响、异常捕获的最佳实践以及错误日志记录与分析的技巧。进一步介绍了Launcher错误诊断的有效工具和方法,例如
QSFP模块E_O转换揭秘:核心技术与性能指标分析
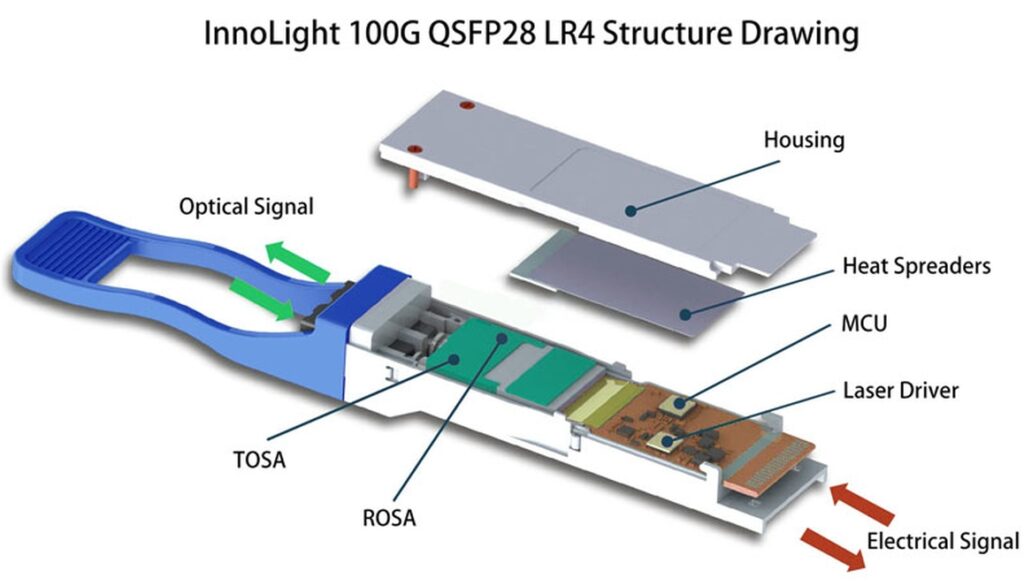
# 摘要
QSFP模块作为一种重要的高速光互连技术,在数据中心和通信系统中扮演着关键角色。本文首先介绍了QSFP模块的市场趋势,随后深入探讨了其核心的电光转换技术及其关键组件,如激光器技术、光电探测器和高速电子组件。文章详细分析了影响QSFP模块性能的各种因素,包括传输速率、传输距离、温度范围以及模块兼容性。通过实际应用案例,本文
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )