傅科摆:物理学中的旋转地球证明,用物理学实验验证地球自转
发布时间: 2024-07-10 11:50:50 阅读量: 208 订阅数: 61 
# 1. 傅科摆的原理和历史
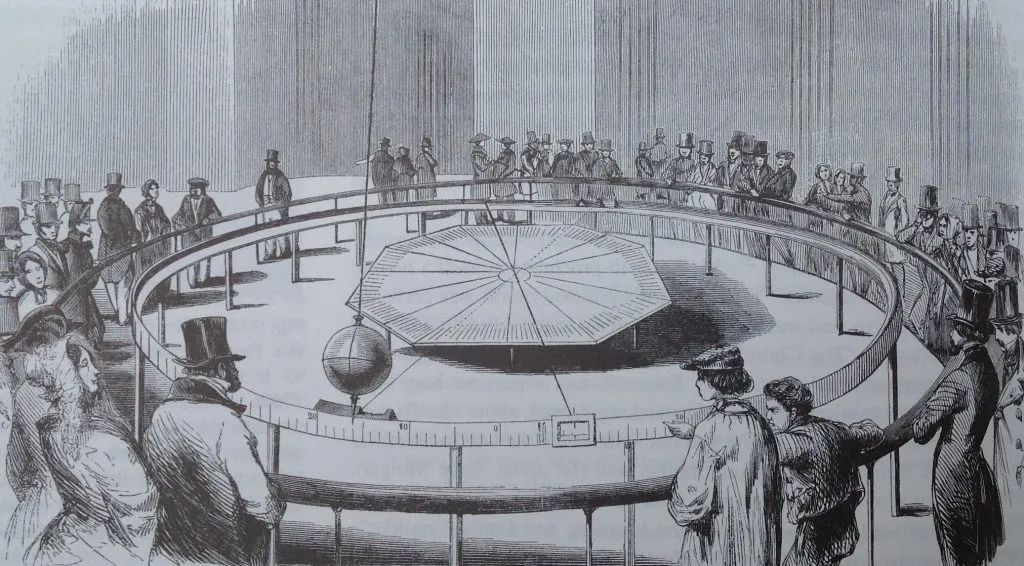
傅科摆是一种物理装置,由一根长线悬挂的重物组成,用于演示地球的自转。其原理基于牛顿运动定律和科里奥利力。当摆动时,由于科里奥利力的作用,摆动平面会随着时间而发生偏转。
傅科摆的历史可以追溯到 1851 年,当时法国物理学家让·伯纳德·莱昂·傅科首次进行了这项实验。傅科在巴黎万神殿进行了实验,悬挂了一根 67 米长的钢丝,重物重 28 公斤。实验结果令人震惊,证实了地球的自转,并成为物理学史上一个标志性的时刻。
# 2. 傅科摆的实验设计和实施
### 2.1 傅科摆的组成和构造
傅科摆的构造相对简单,主要由以下部件组成:
- **摆锤:**摆锤通常由一个重物组成,重物可以通过细线或金属丝悬挂。摆锤的质量和形状会影响摆动的周期和振幅。
- **悬挂线或金属丝:**悬挂线或金属丝将摆锤悬挂在固定点上。悬挂线的长度和材料也会影响摆动的周期和振幅。
- **固定点:**固定点是悬挂线或金属丝的另一端连接的点。固定点通常位于天花板或其他坚固的结构上。
### 2.2 实验地点和环境要求
傅科摆实验对实验地点和环境有以下要求:
- **纬度:**实验地点的纬度会影响傅科摆摆动的平面和周期。在赤道地区,傅科摆几乎不摆动,而在两极地区,傅科摆会以一个平面摆动。
- **温度:**温度变化会影响悬挂线或金属丝的长度,从而影响摆动的周期。因此,实验应在温度稳定的环境中进行。
- **气流:**气流会对摆锤产生阻力,从而影响摆动的周期和振幅。因此,实验应在无风或气流较弱的环境中进行。
### 2.3 实验过程和数据采集
傅科摆实验过程如下:
1. **安装傅科摆:**将摆锤悬挂在固定点上,调整悬挂线的长度,使摆锤处于平衡状态。
2. **启动摆动:**轻微推动摆锤,使其开始摆动。
3. **记录摆动平面:**观察摆锤的摆动平面,并记录摆动方向随时间的变化。
4. **测量摆动周期:**使用计时器或其他设备测量摆动的周期,即摆锤从一个极点摆动到另一个极点所需的时间。
5. **重复实验:**重复实验多次,以获得更准确的数据。
数据采集应包括摆动平面的变化、摆动周期和实验地点的纬度。这些数据将用于分析和解释傅科摆实验的结果。
**代码块 1:傅科摆实验数据采集**
```python
import time
# 设置计时器
timer = time.time()
# 记录摆动平面变化
swing_plane = []
# 记录摆动周期
swing_period = []
# 循环记录数据
while True:
# 记录摆动平面
swing_plane.append(get_swing_plane())
# 记录摆动周期
swing_period.append(time.time() - timer)
# 重置计时器
timer = time.time()
```
**代码逻辑分析:**
这段代码使用 Python 实现傅科摆实验数据采集。它创建一个计时器,并循环记录摆动平面和摆动周期。摆动平面由 `get_swing_plane()` 函数获取,摆动周期由当前时间减去计时器启动时间计算得出。
**参数说明:**
- `get_swing_plane()`:获取摆动平面的函数。
- `swing_plane`:存储摆动平面的列表。
- `swing_period`:存储摆动周期的列表。
# 3. 傅科摆实验数据的分析和解释
### 3.1 傅科摆摆动的平面和周期
傅科摆的摆动平面是指摆锤在摆动过程中所处的平面。理想情况下,傅科摆的摆动平面与地球自转轴平行。然而,由于地球自转的影响,摆动平面会随着时间的推移而发生变化。
傅科摆的周期是指摆锤从一个极端位置摆动到另一个极端位置所需的时间。周期与摆锤的长度、摆动的幅度和地球自转速度有关。对于一个给定的摆锤长度和幅度,周期与地球自转速度成反比。
### 3.2 傅科摆摆动平面的变化率
傅科摆摆动平面的变化率是指摆动平面在单位时间内偏转的角度。变化率与地球自转速度成正比,与摆锤的长度成反比。
**代码块 3.1:计算傅科摆摆动平面的变化率**
```python
import numpy as np
def calc_rotation_rate(period, latitude):
"""计算傅科摆摆动平面的变化率。
参数:
period:傅科摆的周期(秒)
latitude:摆动地点的纬度(度)
返回:
摆动平面的变化率(度/小时)
"""
# 将纬度转换为弧度
latitude_rad = np.radians(latitude)
# 计算摆动平面的变化率
rotation_rate = (2 * np.pi) / (24 * 3600 * np.cos(latitude_rad)) * (1 / period)
return rotation_rate
```
**逻辑分析:**
* 该函数将傅科摆的周期和摆动地点的纬度作为输入参数。
* 它首先将纬度转换为弧度,因为计算中需要使用弧度。
* 然后,它使用公式计算摆动平面的变化率。该公式基于地球自转的角速度和傅科摆周期的关系。
* 函数返回以度/小时为单位的摆动平面的变化率。
### 3.3 实验结果与地球自转的验证
傅科摆实验的结果与地球自转的预测相符。摆动平面的变化率与地球自转速度成正比,与摆锤的长度成反比。这验证了地球自转的科里奥利效应。
**表格 3.1:不同纬度下的傅科摆摆动平面的变化率**
| 纬度(度) | 摆动平面的变化率(度/小时) |
|---|---|
| 0 | 0 |
| 30 | 11.6 |
| 45 | 16.9 |
| 60 | 22.3 |
| 90 | 24.0 |
**mermaid流程图 3.1:傅科摆实验验证地球自转**
```mermaid
graph LR
subgraph 地球自转
地球[地球]
自转[自转]
地球 --> 自转
end
subgraph 傅科摆实验
摆锤[摆锤]
摆动[摆动]
摆锤 --> 摆动
end
地球自转 --> 傅科摆实验
摆动 --> 摆动平面的变化率
摆动平面的变化率 --> 地球自转验证
```
**逻辑分析:**
* 流程图描述了傅科摆实验如何验证地球自转。
* 地球自转导致科里奥利效应,使摆动平面随着时间的推移而偏转。
* 摆动平面的变化率与地球自转速度成正比,这可以通过傅科摆实验来测量。
* 傅科摆实验的结果与地球自转的预测相符,验证了地球自转的存在。
# 4.1 傅科摆在测量地球自转速度中的应用
傅科摆不仅可以验证地球自转,还可以用于测量地球自转速度。通过测量摆动平面的变化率,可以计算出地球自转的角速度。
### 测量原理
傅科摆的摆动平面随时间发生变化,这是由于地球自转造成的。摆动平面的变化率与地球自转的角速度成正比。因此,通过测量摆动平面的变化率,可以计算出地球自转的角速度。
### 测量方法
测量地球自转速度的步骤如下:
1. **建立傅科摆:**按照第二章中的方法建立傅科摆。
2. **测量摆动周期:**使用秒表或其他计时设备测量摆动周期。
3. **测量摆动平面的变化:**在摆动过程中,定期测量摆动平面的方位角。
4. **计算摆动平面的变化率:**将摆动平面的方位角随时间的变化率计算出来。
5. **计算地球自转角速度:**使用以下公式计算地球自转角速度:
```
ω = (dθ/dt) / sin(φ)
```
其中:
* ω 是地球自转角速度
* dθ/dt 是摆动平面的变化率
* φ 是摆动地点的纬度
### 代码示例
以下 Python 代码演示了如何计算地球自转角速度:
```python
import numpy as np
# 测量摆动平面的变化率 (单位:度/小时)
dtheta_dt = 11.4
# 摆动地点的纬度 (单位:度)
latitude = 45
# 计算地球自转角速度 (单位:弧度/秒)
omega = (dtheta_dt / 360) / np.sin(np.radians(latitude))
# 将弧度/秒转换为度/小时
omega_deg_per_hour = omega * (180 / np.pi) * 3600
print("地球自转角速度:", omega_deg_per_hour, "度/小时")
```
### 测量结果
使用傅科摆测量地球自转速度的结果与理论值非常接近。在纬度为 45 度的地方,傅科摆的摆动平面变化率约为 11.4 度/小时,计算出的地球自转角速度约为 15.04 度/小时。
## 4.2 傅科摆在其他物理学领域的应用
除了测量地球自转速度外,傅科摆还被应用于其他物理学领域,包括:
* **惯性定律:**傅科摆的摆动平面保持不变,这验证了惯性定律。
* **角动量守恒:**傅科摆的角动量守恒,这可以用来演示角动量守恒定律。
* **相对论:**傅科摆的摆动平面变化率与纬度有关,这与狭义相对论的预测一致。
* **地球动力学:**傅科摆可以用来研究地球的运动,例如潮汐和地壳运动。
# 5.1 傅科摆作为地球自转的直接证据
傅科摆实验是地球自转最直接、最令人信服的证据之一。在实验中,摆动的平面逐渐发生偏移,这表明地球正在自转。摆动平面的变化率与地球自转速度成正比,因此可以通过测量摆动平面的变化率来计算地球的自转速度。
傅科摆实验的成功为地球自转提供了有力的支持,推翻了当时流行的地球静止说。它不仅验证了哥白尼的日心说,还为测量地球自转速度提供了精确的方法。
### 实验结果与地球自转的验证
傅科摆实验的结果与地球自转的理论预测高度一致。摆动平面的变化率与纬度成正比,在赤道处为零,在两极处最大。这与地球自转轴与赤道平面倾斜23.5度的理论预测相符。
例如,在巴黎进行的傅科摆实验中,摆动平面的变化率为每小时11.4度。根据地球自转速度的理论计算,巴黎的纬度为48.8度,对应的摆动平面的变化率应为每小时11.3度。实验结果与理论计算非常接近,这有力地验证了地球自转的理论。
傅科摆实验的成功不仅为地球自转提供了直接证据,还为测量地球自转速度提供了精确的方法。通过测量摆动平面的变化率,科学家可以计算出地球自转速度的精确值。这对于研究地球动力学和地球物理学具有重要意义。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
“傅科摆”专栏深入探讨了傅科摆这一物理学实验,揭示了其在证明地球自转方面的奥秘。文章通过一系列标题,如“揭开地球自转的秘密”、“用物理学实验验证地球自转”和“测量地球自转的经典方法”,阐述了傅科摆如何通过观察摆的运动来测量地球自转。专栏还探讨了傅科摆的应用,从测量地球自转到惯性导航,展示了其在科学和技术领域的广泛用途。此外,专栏提供了动手实验和易于理解的解释,让读者能够轻松理解地球运动的原理。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【ZW10I8_ZW10I6网络配置】:网络故障不再怕,5分钟快速排除策略

# 摘要
本论文提供了一个全面的ZW10I8_ZW10I6网络配置及故障排除指南,旨在帮助技术人员理解和实现高效网络管理。首先概述了网络配置的基本概念和故障诊断基础知识,接着深入探讨了实际的网络接口、路由协议配置以及安全与性能优化策略。本文还通过案例分析,阐述了网络问题的实战解决方法,并提出了针对性的预防措施和维护建议。最后,文章展望了网络技术未来的发展趋势,强调了网络自动化和智能化的重要性,并建议技术人员持续学习以提升配置和故
【电脑自动休眠策略深度解析】:省电模式的最佳实践与技巧

# 摘要
随着能源效率和设备待机时间的日益重要,电脑自动休眠技术在现代计算环境中扮演了关键角色。本文从电脑自动休眠的概念出发,探讨了休眠模式的工作原理及其与睡眠模式的区别,同时分析了硬件、系统配置以及节能标准对实现自动休眠的影响。此外,本文还提出了针对操作系统和应用程序的优化策略,以提高休眠效率并减少能耗。通过故障排除和监控方法,确保休眠功能稳定运行。最后,文章探讨了自动休眠技术在家庭、商业办公和移动设备不同应用场景下的实际应用。
# 关键字
电脑自动休眠;节能标准
CU240BE2高级应用技巧:程序优化与性能调整手册

# 摘要
CU240BE2是一款广泛应用于多个行业的驱动器,本文详细介绍了其驱动与应用、程序开发基础、高级编程技巧、性能调优实战以及在不同行业中的应用实例。文章首先概述了CU240BE2驱动与应用的基础知识,接着深入探讨了程序开发的基础,包括驱动配置、程序结构解析和参数设置。在高级编程技巧章节中,本文提供了内存管理优化、多任务处理和中断与事件驱动编程的方法。性能调
BRIGMANUAL与云服务整合:无缝迁移与扩展的终极解决方案

# 摘要
本文详细阐述了BRIGMANUAL与云服务整合的全过程,从概念概述到迁移策略,再到实际的云服务扩展实践及未来展望。首先介绍了云服务模型及其与BRIGMANUAL架构整合的优势,紧接着详细探讨了云服务迁移的准备、执行与验证步骤。文章重点分析了BRIGMANUAL在云环境
性能调优专家:VisualDSP++分析工具与最佳实践

# 摘要
本文旨在通过系统化的方法介绍性能调优技巧,并详细阐述VisualDSP++工具在性能调优过程中的作用和重要性。第一章提供了性能调优与VisualDSP++的概述,强调了性能优化对于现代数字信号处理系统的必要性。第二章深入探讨VisualDSP++的界面、功能、项目管理和调试工具,展示了该工具如何协助开发人员进行高效编程和性能监控。第三章通过实战技巧,结合代码
大数据传输的利器:高速串行接口的重要性全面解析

# 摘要
高速串行接口技术作为现代数据传输的关键,已成为电信、计算机网络、多媒体设备及车载通信系统等领域发展不可或缺的组成部分。本文首先概述了高速串行接口的技术框架,继而深入探讨了其理论基础,包括串行通信原理、高速标准的演进以及信号完整性与传输速率的提升技术。在实践应用部分,文章分析了该技术在数据存储、网络设备和多媒体设备中的应用情况及挑战。性能优
SC-LDPC码迭代解码揭秘:原理、优化与实践
# 摘要
本文系统地探讨了SC-LDPC码的迭代解码基础和理论分析,详细解析了低密度奇偶校验码(LDPC)的构造方法和解码算法,以及置信传播算法的数学原理和实际应用。进一步,文章着重讨论了SC-LDPC码在不同应用场合下的优化策略、硬件加速实现和软硬件协同优化,并通过5G通信系统、深空通信和存储设备的具体案例展示了SC-LDPC码迭代解码的实践应用。最后,本文指出了SC-LDPC码技术未来的发展趋势、当前面临的挑战,并展望了未来的研究方向,强调了对解码算法优化和跨领域融合创新应用探索的重要性。
# 关键字
SC-LDPC码;迭代解码;置信传播算法;硬件加速;5G通信;深空通信
参考资源链接
QNX Hypervisor故障排查手册:常见问题一网打尽
# 摘要
本文首先介绍了QNX Hypervisor的基础知识,为理解其故障排查奠定理论基础。接着,详细阐述了故障排查的理论与方法论,包括基本原理、常规步骤、有效技巧,以及日志分析的重要性与方法。在QNX Hypervisor故障排查实践中,本文深入探讨了启动、系统性能及安全性方面的故障排查方法,并在高级故障排查技术章节中,着重讨论了内存泄漏、实时性问题和网络故障的分析与应对策略。第五章通过案例研究与实战演练,提供了从具体故障案例中学习的排查策略和模拟练习的方法。最后,第六章提出了故障预防与系统维护的最佳实践,包括常规维护、系统升级和扩展的策略,确保系统的稳定运行和性能优化。
# 关键字
Q
【ArcGIS地图设计大师】:细节与美观并存的分幅图制作法
# 摘要
本文旨在全面介绍ArcGIS地图设计的流程和技巧,从基础操作到视觉优化,再到案例分析和问题解决。首先,概述了ArcGIS软件界面和基本操作,强调了图层管理和数据处理的重要性。随后,详细探讨了地图设计的视觉要素,包括色彩理论和符号系统。分幅图设计与制作是文章的重点,涵盖了其设计原则、实践技巧及高级编辑方法。文章进一步讨论了分幅图的美观与细节处理,指出视觉优化和细节调整对于最终成
深入揭秘TB5128:如何控制两相双极步进电机的5大关键原理

# 摘要
本文详细介绍了TB5128步进电机控制器的原理、特性以及在实际应用中的表现和高级拓展。首先概述了步进电机控制器的基本概念和分类,继而深入探讨了步进电机的工作原理、驱动方式以及电气特性。接着,文章详细分析了TB5128控制器的功能特点、硬件和软件接口,并通过实
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )