常见的图像分割算法概述
发布时间: 2024-04-14 22:07:09 阅读量: 104 订阅数: 57 

图像分割算法
# 1. 图像分割概念与应用
图像分割是指将数字图像细分为多个图像子区域或像素的过程。通过图像分割,可以更好地理解图像中的对象和结构,为后续的图像分析和识别提供基础。在计算机视觉领域,图像分割广泛应用于目标识别与跟踪、医学图像分析等领域。通过图像分割,计算机可以更准确地识别出图像中的各个对象,实现自动化的目标检测和分析。在医学图像分析中,图像分割可以帮助医生更好地识别病变部位,辅助诊断和治疗。
总体来说,图像分割是计算机视觉领域的重要研究方向,其应用范围广泛,对于提高图像处理的准确性和效率具有重要意义。
# 2. 基于像素的图像分割算法
#### 2.1 阈值分割算法
图像分割中一个简单而常用的方法是阈值分割,即根据像素的亮度值将图像分割成不同的区域。阈值分割的基本思想是通过设置一个阈值,将图像的像素分为两类:大于等于阈值的像素点属于一类,小于阈值的像素点属于另一类。
##### 2.1.1 全局阈值分割
全局阈值分割是将整幅图像分为前景和背景两部分。首先需要选择一个合适的阈值,然后将图像中所有像素的灰度值与该阈值进行比较,从而实现图像的分割。
```python
import cv2
image = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
_, binary_image = cv2.threshold(image, 127, 255, cv2.THRESH_BINARY)
cv2.imshow('Binary Image', binary_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
##### 2.1.2 自适应阈值分割
自适应阈值分割是一种根据像素周围邻域灰度值的变化情况来动态确定阈值的方法。这种方法可以有效应对图像不均匀光照和噪声的情况。
```python
import cv2
image = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
adaptive_threshold = cv2.adaptiveThreshold(image, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2)
cv2.imshow('Adaptive Threshold', adaptive_threshold)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
#### 2.2 边缘检测与分割
边缘检测是图像处理中常用的技术,可以帮助识别图像中物体的边界。在图像分割中,边缘检测通常用于检测和分割图像中不同区域之间的边界。
##### 2.2.1 Sobel算子
Sobel算子是一种常用的边缘检测算子,它可以通过计算像素点的梯度来检测图像中的边缘。Sobel算子结合了水平和垂直方向的梯度信息,从而能够更准确地检测图像中的边缘。
```python
import cv2
import numpy as np
image = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
sobel_x = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=3)
sobel_y = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=3)
sobel_combined = np.sqrt(sobel_x**2 + sobel_y**2)
cv2.imshow('Sobel Edge Detection', sobel_combined)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
##### 2.2.2 Canny边缘检测
Canny边缘检测是一种多阶段的边缘检测算法,包括高斯滤波、计算梯度、非最大抑制和滞后阈值等步骤。Canny边缘检测可以准确地检测图像中的弱边缘,并将其连接成完整的边缘线条。
```python
import cv2
image = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
canny_edges = cv2.Canny(image, 100, 200)
cv2.imshow('Canny Edge Detection', canny_edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
##### 2.2.3 边缘连通算法
边缘连通算法用于将图像中的边缘像素连接成边缘线条。这种算法可以将离散的边缘点连接成连续的边缘,从而更好地实现图像的分割和特征提取。
```python
import cv2
image = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
_, binary_image = cv2.threshold(image, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary_image, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cv2.drawContours(image, contours, -1, (0, 255, 0), 2)
cv2.imshow('Contour Detection', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
通过以上算法和方法,我们可以实现基于像素的图像分割,有效地将图像分割成不同的区域,并提取出所需的信息,为后续图像分析和处理提供基础。
# 3. 基于区域的图像分割算法
#### 3.1 区域生长算法
图像分割中,区域生长算法是一种基于像素相似性的方法,通过合并具有相似属性的像素来获得图像中连续的区域。该算法通常从种子像素开始,逐步扩展区域范围,直到满足停止准则。
##### 3.1.1 区域合并策略
区域生长算法的关键在于确定像素之间的相似性度量标准,常用的相似性度量包括像素灰度、颜色、纹理等特征。当相邻像素之间的相似性达到一定阈值时,这两个像素会被合并为同一区域。
##### 3.1.2 区域生长的特点
区域生长算法具有对噪声具有一定的鲁棒性,可以有效地处理具有连续特性的图像区域。然而,其结果受到种子像素的选择和合并策略的影响,在面对复杂背景和不均匀光照条件下表现欠佳。
#### 3.2 区域分裂合并算法
区域分裂合并算法旨在克服区域生长算法对合并策略的依赖,采用自适应的分裂和合并策略对图像进行分割。该算法从整体出发,逐步将区域划分为更小的子区域,直至达到分割的要求。
##### 3.2.1 分裂策略
区域分裂合并算法首先确定初始分割区域,然后通过计算区域属性的均值、方差等信息,确定最佳位置进行分裂。常见的分裂策略有均值分裂、方差分裂等。
##### 3.2.2 合并策略
在区域分裂后,需要考虑如何合并分裂得到的子区域,以获得最终的图像分割结果。合并策略通常基于像素的相似性度量,将相似性较高的区域进行合并,直到满足停止准则为止。
#### 3.3 分水岭算法
分水岭算法是一种基于区域的图像分割算法,其灵感来源于水流的流动。该算法通过在图像中构建梯度图像,并将图像看作地形地势,利用不同区域像素的梯度信息进行区域划分。
##### 3.3.1 梯度图像的生成
在分水岭算法中,首先需要计算图像的梯度信息,通常使用Sobel算子或Prewitt算子等进行边缘检测,得到图像的梯度幅值和方向信息。
##### 3.3.2 分水岭算法原理
分水岭算法将图像中的像素看作山谷中的低洼区域,通过向低洼区域注入水,最终使得水汇聚形成分割边界。算法通过对梯度图像进行变换和分析,识别并标记图像中的不同区域,实现图像的分割。
```python
# 伪代码示例:分水岭算法
import numpy as np
import cv2
# 读取图像
image = cv2.imread('image.jpg', 0)
# 计算图像梯度
sobelx = cv2.Sobel(image, cv2.CV_64F, 1, 0, ksize=5)
sobely = cv2.Sobel(image, cv2.CV_64F, 0, 1, ksize=5)
gradient_magnitude = np.sqrt(sobelx**2 + sobely**2)
# 应用分水岭算法
markers = cv2.watershed(image, markers)
result = image.copy()
result[markers == -1] = [255, 0, 0] # 标记分割边界
# 显示分割结果
cv2.imshow('Segmented Image', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
通过区域生长算法和区域分裂合并算法,可以实现基于区域的图像分割,而分水岭算法则提供了一种基于梯度的图像分割方法,这些算法在不同场景下具有各自的优势和适用性。
# 4.1 卷积神经网络(CNN)
卷积神经网络(Convolutional Neural Network,CNN)是一种专门用来处理具有类似网格结构数据的人工神经网络,常用于图像识别、图像分割等任务。CNN的核心思想是通过卷积层、池化层和全连接层等结构来提取特征并实现信息的分类与识别。
#### 4.1.1 FCN网络结构
FCN(Fully Convolutional Network)是一种端到端的全卷积网络,可以接受任意尺寸的输入,并输出相同尺寸的预测。其主要结构包括卷积层、反卷积层和池化层。FCN网络的优势在于可以实现像素级的语义分割。
```python
# FCN网络示例代码
import tensorflow as tf
model = tf.keras.models.Sequential([
tf.keras.layers.Conv2D(64, (3,3), activation='relu', padding='same', input_shape=(256, 256, 3)),
tf.keras.layers.Conv2D(64, (3,3), activation='relu', padding='same'),
tf.keras.layers.Conv2D(1, (1,1), activation='sigmoid', padding='same')
])
```
#### 4.1.2 U-Net网络结构
U-Net是一种用于图像分割的深度学习网络,具有编码器和解码器结构,能够有效地学习到图像中的局部信息和全局信息。U-Net通常应用于医学图像分割等领域,其特点是在网络中添加了跳跃连接,帮助解决信息丢失和梯度消失问题。
```python
# U-Net网络示例代码
from tensorflow.keras.layers import Input, Conv2D, MaxPooling2D, concatenate
def unet():
inputs = Input(shape=(256, 256, 3))
conv1 = Conv2D(64, 3, activation='relu', padding='same')(inputs)
pool1 = MaxPooling2D(pool_size=(2, 2))(conv1)
# 编码器结构...
up9 = concatenate([Conv2D(64, 2, activation='relu', padding='same')(UpSampling2D(size=(2, 2))(conv8)), conv1], axis=3)
# 解码器结构...
return Model(inputs=inputs, outputs=conv10)
```
### 4.2 语义分割与实例分割
语义分割和实例分割是图像分割领域的重要任务,用于识别图像中不同物体的像素并进行区分,其中语义分割关注的是像素级别的物体类别标记,而实例分割则需要对每个物体实例进行像素级的标记。
#### 4.2.1 语义分割概念
语义分割是将图像中的每个像素进行分类,通常使用颜色或类别标签来区分不同的物体或区域。通过深度学习模型如FCN,可以实现图像的语义分割,提取像素级的语义信息,从而实现对图像的精确理解。
```mermaid
graph LR
A[原始图像] --> B(FCN模型)
B --> C[语义分割结果]
```
#### 4.2.2 实例分割概念
实例分割是在语义分割的基础上,进一步区分出不同物体的不同实例,即对图像中每个独立的物体实例进行像素级别的标记。实例分割在目标检测和场景理解等领域有着广泛的应用。
```mermaid
graph LR
A[原始图像] --> B(Mask R-CNN)
B --> C[实例分割结果]
```
#### 4.2.3 Mask R-CNN
Mask R-CNN是一种结合了目标检测和实例分割的深度学习算法,能够在图像中检测物体的同时,实现对物体实例的像素级分割。Mask R-CNN通过在Faster R-CNN基础上增加了分割网络来实现对每个物体实例的准确分割。
```python
# Mask R-CNN示例代码
import mrcnn.model as modellib
model = modellib.MaskRCNN(mode="inference", config=config, model_dir='./')
model.load_weights('mask_rcnn_coco.h5', by_name=True)
image = cv2.imread('test.jpg')
results = model.detect([image], verbose=0)
```
# 5. 图像分割技术的未来发展趋势
- **5.1 深度学习技术的不断进步**
- **5.1.1 对图像分割精度的提升**
- 随着深度学习技术的不断发展,图像分割的精度得到了显著提升。传统的图像分割算法在复杂场景下往往难以准确分割目标边界,而深度学习模型可以学习更高级的特征表示,从而提高分割准确性。
- 通过使用卷积神经网络(CNN)等深度学习模型,可以实现端对端的图像分割,在语义分割和实例分割任务中取得了令人瞩目的结果。
- **5.1.2 对计算效率的改进**
- 随着硬件计算能力的提升和深度学习技术的优化,图像分割算法的计算效率也在逐渐提高。深度学习模型的加速算法、轻量级网络结构以及硬件加速器的广泛应用,使得图像分割在实时性和效率上有了更好的表现。
- 开发更适用于移动端设备的轻量级深度学习模型,如MobileNet和Tiny YOLO等,在保证一定精度的前提下进一步提高了图像分割算法的计算效率。
- **5.2 结合多模态信息的图像分割**
- **5.2.1 多模态数据融合**
- 在未来的发展中,结合多模态信息将成为图像分割技术的重要方向。多模态数据包括不同传感器采集的图像、文本、声音等信息,融合这些信息可以提高对复杂场景的理解和处理能力。
- 通过融合可见光图像和红外图像、光学图像和雷达图像等不同模态的信息,可以更好地应对复杂环境下的图像分割任务,提高分割的准确性和鲁棒性。
```mermaid
graph TD
A[传感器采集多模态数据] --> B[多模态数据融合]
B --> C[深度学习模型训练]
C --> D[提高图像分割效果]
```
- **5.2.2 融合方法在图像分割中的应用**
- 基于图像内容和语义信息的多模态数据融合方法,在医学图像、安防监控、自动驾驶等领域具有广泛应用。例如,在医学影像分析中,结合MRI和CT扫描图像的多模态信息可以帮助医生更准确地定位病变位置和边界,提高诊断准确性和治疗效果。
- 在自动驾驶领域,融合摄像头、激光雷达、GPS等多模态传感器信息,可以提高车辆环境感知和图像分割的准确性,保障行车安全。
通过不断地深化对深度学习技术的研究和应用,结合多模态信息的图像分割技术将在未来呈现出更加广阔的发展前景,并为各个领域的应用提供更加准确、高效的图像分割解决方案。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏全面介绍了图像分割的各个方面,从基础概念和应用领域到常见的算法和方法。它深入探讨了基于像素、区域和深度学习的图像分割技术,并比较了边缘检测算法。专栏还提供了评估图像分割质量的指标和方法,以及应对常见挑战的策略。此外,它还介绍了基于聚类和模型的分割技术,以及语义分割和实例分割之间的区别。专栏还涵盖了深度学习在图像分割中的应用,包括全卷积网络。它比较了传统和深度学习方法,并研究了像素点分类和半监督学习在图像分割中的作用。最后,它探讨了图像分割在医学影像处理中的应用,以及实时处理的挑战和解决方案。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Solr搜索引擎构建全攻略】:企业级搜索引擎从零到英雄的必经之路
# 摘要
Solr是一种基于Lucene的开源搜索引擎,广泛应用于大数据搜索和实时分析。本文首先概述了Solr的基本定义、应用场景以及与其它搜索引擎的比较,并介绍了Solr的版本演进和主要特性。随后
跨文化沟通在远程团队中的关键:技术团队案例研究揭秘

# 摘要
随着全球化的加速和技术的发展,跨文化沟通在技术团队中的重要性日益凸显。本文系统性地探讨了跨文化沟通的重要性、理论基础以及实践中的挑战与策略,并特别关注了远程团队的工作环境。通过对不同文化维度理论的分析、沟通模型的探讨,以及案例研究方法
分布式实时系统的dSPACE RTI应用:工业4.0时代的关键技术
# 摘要
本文详细介绍了分布式实时系统(dSPACE RTI)的理
【企业级接口对接最佳实践】:打造无缝集成的系统平台
# 摘要
随着企业信息技术的发展,企业级接口对接成为系统集成的关键环节。本文首先概述了企业级接口对接的重要性及其理论基础,包括定义、作用、接口协议、数据交换格式和安全性问题。其次,通过实践操作的讨论,重点介绍了高效接口的设计与实现、文档化、版本管理、测试与部署的最佳实践。进而,本文探讨了在微服务架构下接口对接的特定议题,以及异常处理、日志记录和性能优
【Android系统移植OpenSSH秘籍】:一步到位的实战教程

# 摘要
本文旨在探讨OpenSSH在Android系统上的移植过程,涵盖了从基础理论到实际部署的各个方面。首先,我们介绍了OpenSSH的基础理论与架构,并讨论了其在Android系统中的安装、配置以及安全机制。随后,文章深入分析了Android系统架构,为Op
MIDAS M32数字音频接口深度解析:音频世界的桥梁

# 摘要
MIDAS M32作为一款先进的音频接口,结合了高端音频处理技术和用户友好的软件应用,提供了专业级的音频制作和现场录音体验。本文首先概述了MIDAS M32的核心技术,随后深入分析了其硬件组成、数字信号处理、接口兼容性及软件应用方面的特点。通过性能测试与优化章节,展示了如何通过硬件和软件的协同工作来达到最佳音质。同时,本文也探讨了MIDAS M32在实时音频制作、
【Windows 10 2004_20H2驱动兼容性测试】:系统稳定性必备技巧
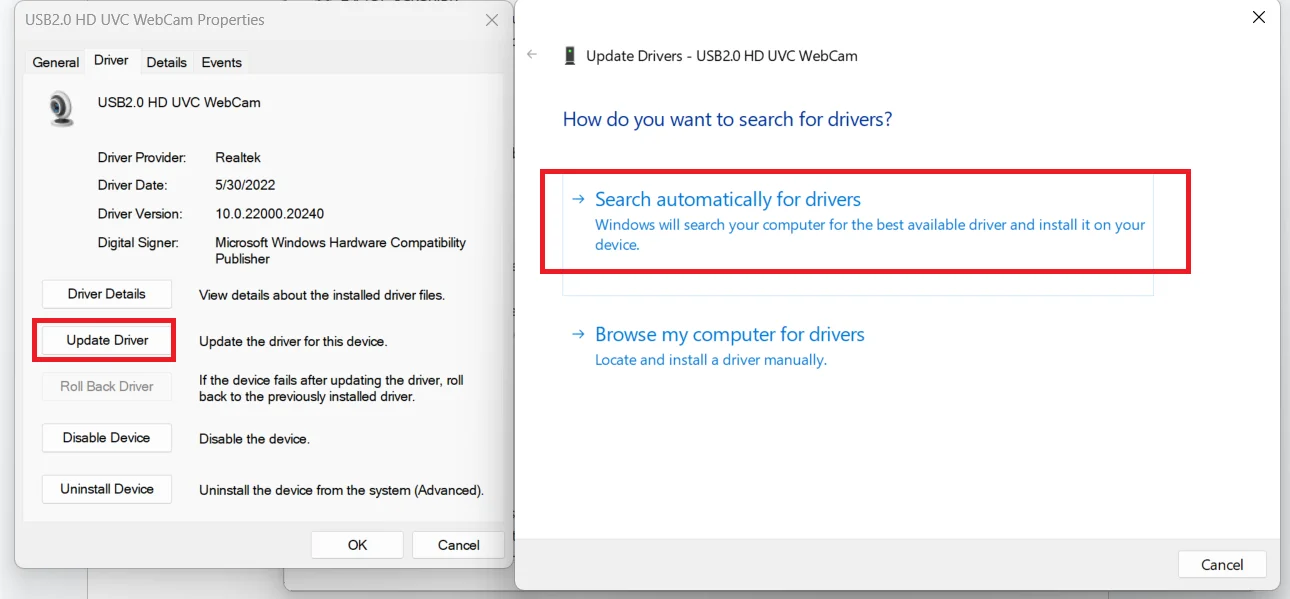
# 摘要
本文针对Windows 10系统中驱动兼容性问题进行了全面探讨,涵盖了驱动兼容性测试的理论基础、实践操作、调试与优化方法以及系统稳定性管理技巧。通过分析驱动兼容性对系统稳定性的影响和常见症状,本文提供了测试环境搭建、工具选择和测试流程设计的详细指导。同时,详细介绍了手动与自动化测试方法,
【LS-DYNA隐式求解进阶指南】:关键参数优化,让求解更高效
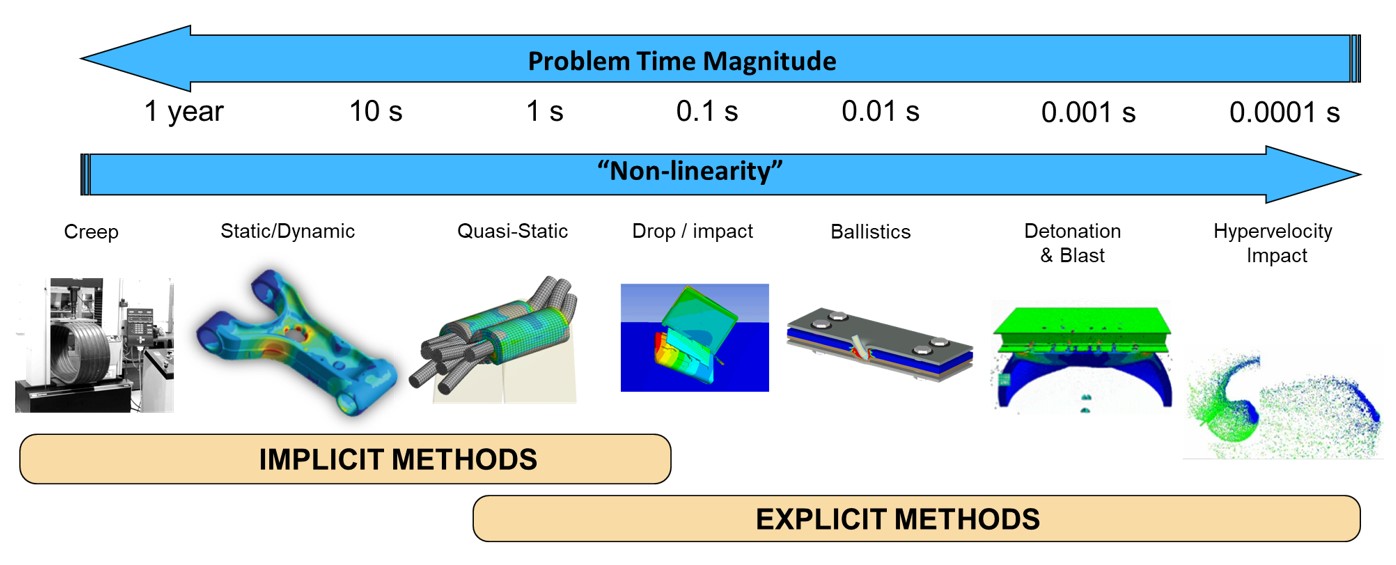
# 摘要
LS-DYNA作为一种先进的多物理场仿真软件,其隐式求解功能在处理复杂的非线性问题时具有不可替代的作用。本文从隐式求解基础出发,详细分析了关键参数的理论基础,包括隐式时间积分方法和求解过程中的关键参数定义及其作用。进一步,本文探讨了参数优化策略
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )