齐次坐标的概述
发布时间: 2024-01-30 17:29:56 阅读量: 27 订阅数: 29 

齐次坐标1
# 1. 齐次坐标的基本概念
## 1.1 二维和三维坐标系统
在计算机图形学和机器人学中,二维和三维坐标系统用来描述平面和空间中的位置和方向。二维坐标系统由x和y轴构成,而三维坐标系统由x、y和z轴构成。
## 1.2 齐次坐标的引入
齐次坐标是对笛卡尔坐标系的一种扩展,它引入了一个额外的维度,使得对平移操作的描述更加简洁和方便。
## 1.3 齐次坐标的优势和应用
齐次坐标能够更加高效地表示平移、旋转和缩放操作,在计算机图形学、机器人学和人工智能领域有着广泛的应用。
接下来,请您告诉我需要在哪种编程语言中展示这份代码呢?Python,Java,Go,JavaScript还是其他的编程语言呢?
# 2. 齐次坐标的数学表示
在计算机图形学和机器人学中,齐次坐标是一种常用的表示方法。它通过引入额外的维度,使得坐标系统更加灵活和便于计算。
### 2.1 齐次坐标的表示方法
齐次坐标的表示方法可以通过向普通笛卡尔坐标加上一个额外的坐标表示。对于二维坐标系统,我们可以用(x, y, w)表示一个点的齐次坐标,其中w是一个非零实数。对于三维坐标系统,我们可以用(x, y, z, w)表示一个点的齐次坐标。
### 2.2 齐次坐标与笛卡尔坐标的关系
齐次坐标与笛卡尔坐标之间存在一一对应的关系。对于二维坐标系统,一个点的齐次坐标 (x, y, w) 对应于笛卡尔坐标 (x/w, y/w)。对于三维坐标系统,一个点的齐次坐标 (x, y, z, w) 对应于笛卡尔坐标 (x/w, y/w, z/w)。
通过这种关系,我们可以在齐次坐标和笛卡尔坐标之间进行相互转换,方便进行坐标变换和运算。
### 2.3 齐次坐标的变换与运算
在图形学和机器人学中,常常需要对点进行变换和运算。齐次坐标提供了一种方便的方式来进行这些操作。
对于平移变换,我们可以通过将平移向量加到齐次坐标的前三个分量来实现。例如,对于二维平面上的点(x, y, w),平移变换可以表示为(x+t_x, y+t_y, w)。
对于旋转变换,我们可以通过乘以一个旋转矩阵来实现。对于二维坐标系统,旋转变换可以表示为:
```
cos(theta) -sin(theta) 0
sin(theta) cos(theta) 0
0 0 1
```
在进行坐标运算时,需要记住齐次坐标的最后一个分量w,以便在需要时进行归一化操作。对于二维坐标系统,可以通过将结果的前两个分量除以w来得到笛卡尔坐标。
通过这些变换和运算,我们可以实现图形的平移、旋转、缩放等操作,并且可以方便地组合多个变换。
总结:齐次坐标的数学表示是通过引入额外的维度来扩展笛卡尔坐标系。齐次坐标与笛卡尔坐标之间存在一一对应的关系,可以方便地进行相互转换。齐次坐标提供了一种方便的方式来进行坐标变换和运算,在计算机图形学和机器人学中有广泛的应用。
# 3. 齐次坐标在计算机图形学中的应用
在计算机图形学中,齐次坐标扮演着重要的角色,它被广泛应用于图形变换、相机投影和三维渲染等领域。
#### 3.1 齐次坐标在图形变换

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
PyEcharts数据可视化入门至精通(14个实用技巧全解析)

# 摘要
PyEcharts是一个强大的Python图表绘制库,为数据可视化提供了丰富和灵活的解决方案。本文首先介绍PyEcharts的基本概念、环境搭建,并详细阐述了基础图表的制作方法,包括图表的构成、常用图表类型以及个性化设置。接着,文章深入探讨了PyEcharts的进阶功能,如高级图表类型、动态交互式图表以及图表组件的扩展。为了更有效地进行数据处理和可视化,本文还分
【单片机温度计终极指南】:从设计到制造,全面解读20年经验技术大咖的秘诀
# 摘要
本文系统地介绍了单片机温度计的设计与实现。首先,概述了温度计的基础知识,并对温度传感器的原理及选择进行了深入分析,包括热电偶、热阻和NTC热敏电阻器的特性和性能比较。接着,详细讨论了单片机的选择标准、数据采集与处理方法以及编程基础。在硬件电路设计章节,探讨了电路图绘制、PCB设计布局以及原型机制作的技巧。软件开发方面,本文涉及用户界
MQTT协议安全升级:3步实现加密通信与认证机制
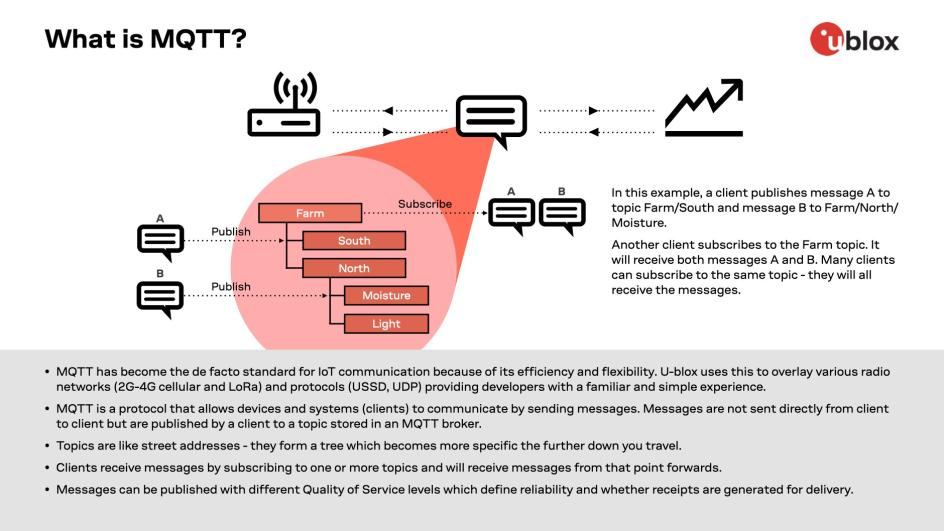
# 摘要
本文全面探讨了MQTT协议的基础知识、安全性概述、加密机制、实践中的加密通信以及认证机制。首先介绍了MQTT协议的基本通信过程及其安全性的重要性,然后深入解析了MQTT通信加密的必要性、加密算法的应用,以及TLS/SSL等加密技术在MQTT中的实施。文章还详细阐述了MQTT协议的认证机制,包括不同类型的认证方法和客户端以
【继电器分类精讲】:掌握每种类型的关键应用与选型秘籍

# 摘要
继电器作为电子控制系统中的关键组件,其工作原理、结构和应用范围对系统性能和可靠性有着直接影响。本文首先概述了继电器的工作原理和分类,随后详细探讨了电磁继电器的结构、工作机制及设计要点,并分析了其在工业控制和消费电子产品中的应用案例。接着,文章转向固态继电器,阐述了其工作机制、特点优势及选型策略,重点关注了光耦合器作用和驱动电路设计。此外,本文还分类介绍了专用继电器的种类及应用,并分析了选型考虑因素。最后,提出了继电器选型的基本步骤和故障分析诊断方
【TEF668x信号完整性保障】:确保信号传输无懈可击
# 摘要
本文详细探讨了TEF668x信号完整性问题的基本概念、理论基础、技术实现以及高级策略,并通过实战应用案例分析,提供了具体的解决方案和预防措施。信号完整性作为电子系统设计中的关键因素,影响着数据传输的准确性和系统的稳定性。文章首先介绍了信号完整性的重要性及其影响因素,随后深入分析了信号传输理论、测试与评估方法。在此基础上,探讨了信号
【平安银行电商见证宝API安全机制】:专家深度剖析与优化方案
# 摘要
本文对平安银行电商见证宝API进行了全面概述,强调了API安全机制的基础理论,包括API安全的重要性、常见的API攻击类型、标准和协议如OAuth 2.0、OpenID Connect和JWT认证机制,以及API安全设计原则。接着,文章深入探讨了API安全实践,包括访问控制、数据加密与传输安全,以及审计与监控实践。此外,还分
cs_SPEL+Ref71_r2.pdf实战演练:如何在7天内构建你的第一个高效应用
# 摘要
本文系统介绍了cs_SPEL+Ref71_r2.pdf框架的基础知识、深入理解和应用实战,旨在为读者提供从入门到高级应用的完整学习路径。首先,文中简要回顾了框架的基础入门知识,然后深入探讨了其核心概念、数据模型、业务逻辑层和服务端编程的各个方面。在应用实战部分,详细阐述了环境搭建、应用编写和部署监控的方法。此外,还介绍了高级技巧和最
【事件处理机制深度解析】:动态演示Layui-laydate回调函数应用

# 摘要
本文系统地探讨了Layui-laydate事件处理机制,重点阐述了回调函数的基本原理及其在事件处理中的实现和应用。通过深入分析Layui-laydate框架中回调函数的设计和执行,本文揭示了回调函数如何为Web前端开发提供更灵活的事件管理方式。文章进一步介绍了一些高级技巧,并通过案例分析,展示了回调函数在解决实际项目问题中的有效性。本文旨在为前端开
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )