【STM32单片机开发实战指南】:从零基础到精通的进阶秘籍
发布时间: 2024-07-03 15:30:54 阅读量: 133 订阅数: 51 

STM32库开发实战指南基于STM32F103(第2版).pdf
# 1. STM32单片机简介与基础
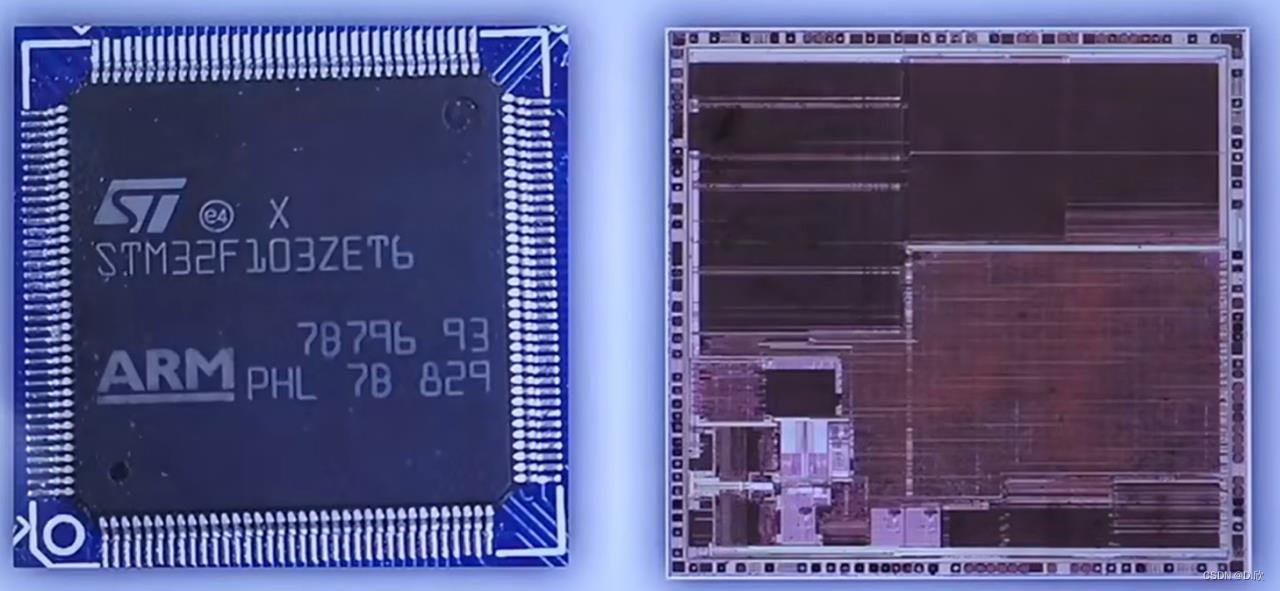
STM32单片机是意法半导体(STMicroelectronics)公司生产的一系列32位微控制器,基于ARM Cortex-M内核。STM32单片机以其高性能、低功耗和丰富的外设而闻名,广泛应用于工业控制、医疗设备、消费电子等领域。
本节将介绍STM32单片机的基本概念、架构和特点。我们将涵盖STM32单片机的不同系列、封装类型和引脚功能。通过本节,读者将对STM32单片机有一个全面的了解,为后续的开发奠定基础。
# 2. STM32单片机开发环境搭建与配置
### 2.1 STM32开发工具链介绍
STM32开发工具链是一个包含编译器、汇编器、链接器和调试器等工具的集合,用于开发STM32单片机程序。官方提供的开发工具链称为STM32CubeIDE,它基于Eclipse集成开发环境(IDE),提供了丰富的功能和友好的用户界面。
### 2.2 开发环境的安装和配置
**1. 安装STM32CubeIDE**
从ST官方网站下载STM32CubeIDE安装程序,并按照提示进行安装。
**2. 配置开发环境**
打开STM32CubeIDE,选择“File”->“Preferences”,在“General”->“Workspace”中设置工作空间路径。在“C/C++”->“Build”中设置编译器和链接器选项。
**3. 安装STM32CubeMX**
STM32CubeMX是一个图形化配置工具,用于生成STM32单片机的初始化代码和外设配置。从ST官方网站下载STM32CubeMX安装程序,并按照提示进行安装。
### 2.3 项目创建和管理
**1. 创建新项目**
在STM32CubeIDE中,选择“File”->“New”->“STM32 Project”,选择目标单片机型号和开发板,输入项目名称,点击“Finish”创建新项目。
**2. 使用STM32CubeMX生成代码**
在STM32CubeIDE中,右键点击项目名称,选择“STM32CubeMX”,打开STM32CubeMX配置界面。根据需要配置单片机的时钟、外设和中断等参数,然后点击“Generate Code”生成初始化代码。
**3. 编译和调试程序**
在STM32CubeIDE中,点击“Build”按钮编译程序,如果编译成功,点击“Debug”按钮进入调试模式,可以单步执行程序,查看变量值和寄存器状态。
**代码示例:**
```c
#include "stm32f10x.h"
int main(void)
{
// 初始化时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 初始化GPIOA
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 循环点亮和熄灭LED
while (1)
{
GPIO_SetBits(GPIOA, GPIO_Pin_0); // 点亮LED
HAL_Delay(500); // 延时500ms
GPIO_ResetBits(GPIOA, GPIO_Pin_0); // 熄灭LED
HAL_Delay(500); // 延时500ms
}
}
```
**代码逻辑分析:**
该代码使用STM32F10x单片机,初始化GPIOA的0号引脚为输出模式,并循环点亮和熄灭连接在该引脚上的LED。
**参数说明:**
* `RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE)`:使能GPIOA时钟。
* `GPIO_InitTypeDef GPIO_InitStructure`:GPIO初始化结构体。
* `GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0`:设置要初始化的引脚为0号引脚。
* `GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP`:设置引脚为推挽输出模式。
* `GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz`:设置引脚输出速度为50MHz。
* `GPIO_Init(GPIOA, &GPIO_InitStructure)`:根据结构体参数初始化GPIOA。
* `GPIO_SetBits(GPIOA, GPIO_Pin_0)`:设置GPIOA的0号引脚为高电平,点亮LED。
* `HAL_Delay(500)`:延时500ms。
* `GPIO_ResetBits(GPIOA, GPIO_Pin_0)`:设置GPIOA的0号引脚为低电平,熄灭LED。
# 3. STM32单片机硬件基础
### 3.1 STM32单片机架构与外设
#### 3.1.1 STM32单片机架构
STM32单片机采用ARM Cortex-M内核,具有以下特点:
- 基于哈佛架构,指令和数据存储器分离
- 3级流水线,提高指令执行效率
- 内置浮点运算单元(FPU),支持浮点运算
- 低功耗设计,支持多种睡眠模式
#### 3.1.2 STM32单片机外设
STM32单片机集成了丰富的片上外设,包括:
- GPIO(通用输入/输出口):用于连接外部设备
- 定时器:用于产生定时脉冲和测量时间
- ADC(模数转换器):用于将模拟信号转换为数字信号
- DAC(数模转换器):用于将数字信号转换为模拟信号
- UART(通用异步收发器):用于串行通信
- I2C(串行总线):用于与其他设备通信
- SPI(串行外围接口):用于与高速设备通信
### 3.2 GPIO、定时器、ADC等外设的应用
#### 3.2.1 GPIO应用
GPIO可以用于控制外部设备,如LED、按键、传感器等。以下代码演示了如何使用GPIO控制LED:
```c
// 定义GPIO引脚
#define LED_PIN GPIO_PIN_13
// 初始化GPIO引脚
void gpio_init() {
// 设置GPIO引脚为输出模式
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = LED_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
// 控制LED亮灭
void led_control(uint8_t state) {
if (state) {
// 点亮LED
HAL_GPIO_WritePin(GPIOA, LED_PIN, GPIO_PIN_SET);
} else {
// 熄灭LED
HAL_GPIO_WritePin(GPIOA, LED_PIN, GPIO_PIN_RESET);
}
}
```
#### 3.2.2 定时器应用
定时器可以用于产生定时脉冲和测量时间。以下代码演示了如何使用定时器产生PWM波:
```c
// 定义定时器通道
#define TIM_CHANNEL TIM_CHANNEL_1
// 初始化定时器
void timer_init() {
// 设置定时器参数
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_TimeBaseInitStruct.Period = 1000 - 1; // 1ms定时周期
TIM_TimeBaseInitStruct.Prescaler = 8400 - 1; // 分频系数
TIM_TimeBaseInitStruct.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_TimeBaseInit(&htim1, &TIM_TimeBaseInitStruct);
// 设置PWM输出通道
TIM_OCInitTypeDef TIM_OCInitStruct;
TIM_OCInitStruct.OCMode = TIM_OCMODE_PWM1;
TIM_OCInitStruct.Pulse = 500; // 占空比50%
TIM_OCInitStruct.OCPolarity = TIM_OCPOLARITY_HIGH;
HAL_TIM_PWM_ConfigChannel(&htim1, &TIM_OCInitStruct, TIM_CHANNEL);
// 启动定时器
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL);
}
```
#### 3.2.3 ADC应用
ADC可以用于将模拟信号转换为数字信号。以下代码演示了如何使用ADC测量模拟电压:
```c
// 定义ADC通道
#define ADC_CHANNEL ADC_CHANNEL_1
// 初始化ADC
void adc_init() {
// 设置ADC参数
ADC_InitTypeDef ADC_InitStruct;
ADC_InitStruct.Resolution = ADC_RESOLUTION_12B;
ADC_InitStruct.ScanConvMode = DISABLE;
ADC_InitStruct.ContinuousConvMode = DISABLE;
ADC_InitStruct.DataAlign = ADC_DATAALIGN_RIGHT;
ADC_InitStruct.NbrOfConversion = 1;
HAL_ADC_Init(&hadc1, &ADC_InitStruct);
// 设置ADC通道
ADC_ChannelConfTypeDef ADC_ChannelInitStruct;
ADC_ChannelInitStruct.Channel = ADC_CHANNEL;
ADC_ChannelInitStruct.Rank = 1;
ADC_ChannelInitStruct.SamplingTime = ADC_SAMPLETIME_480CYCLES;
HAL_ADC_ConfigChannel(&hadc1, &ADC_ChannelInitStruct);
}
// 测量模拟电压
uint16_t adc_read() {
// 启动ADC转换
HAL_ADC_Start(&hadc1);
// 等待转换完成
HAL_ADC_PollForConversion(&hadc1, 100);
// 获取转换结果
return HAL_ADC_GetValue(&hadc1);
}
```
### 3.3 中断与DMA机制
#### 3.3.1 中断机制
中断是一种硬件机制,当发生特定事件时,会暂停当前正在执行的程序,并跳转到中断服务程序(ISR)中执行。STM32单片机支持多种中断源,包括:
- 外部中断:由外部设备触发
- 内部中断:由单片机内部事件触发
以下代码演示了如何使用中断处理外部中断:
```c
// 定义外部中断引脚
#define EXTI_PIN GPIO_PIN_13
// 初始化外部中断
void exti_init() {
// 设置外部中断引脚
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = EXTI_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// 设置外部中断
EXTI_InitTypeDef EXTI_InitStruct;
EXTI_InitStruct.Line = EXTI_LINE_13;
EXTI_InitStruct.Mode = EXTI_MODE_INTERRUPT;
EXTI_InitStruct.Trigger = EXTI_TRIGGER_RISING;
EXTI_InitStruct.LineCmd = ENABLE;
HAL_EXTI_Init(&EXTI_InitStruct);
}
// 外部中断服务程序
void EXTI15_10_IRQHandler() {
// 清除中断标志位
HAL_GPIO_EXTI_IRQHandler(EXTI_PIN);
// 处理中断事件
// ...
}
```
#### 3.3.2 DMA机制
DMA(直接内存访问)是一种硬件机制,可以将数据在内存和外设之间直接传输,而无需CPU的干预。STM32单片机支持多种DMA通道,可以连接到不同的外设。
以下代码演示了如何使用DMA传输数据:
```c
// 定义DMA通道
#define DMA_CHANNEL DMA_CHANNEL_1
// 初始化DMA
void dma_init() {
// 设置DMA参数
DMA_InitTypeDef DMA_InitStruct;
DMA_InitStruct.Channel = DMA_CHANNEL;
DMA_InitStruct.Direction = DMA_MEMORY_TO_PERIPH;
DMA_InitStruct.PeriphInc = DMA_PINC_DISABLE;
DMA_InitStruct.MemInc = DMA_MINC_ENABLE;
DMA_InitStruct.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
DMA_InitStruct.MemDataAlignment = DMA_MDATAALIGN_BYTE;
DMA_InitStruct.Mode = DMA_NORMAL;
DMA_InitStruct.Priority = DMA_PRIORITY_LOW;
HAL_DMA_Init(&hdma1, &DMA_InitStruct);
// 设置DMA传输源和目标
DMA_HandleTypeDef* hdma = &hdma1;
hdma->Instance->PAR = (uint32_t)&data_source;
hdma->Instance->M0AR = (uint32_t)&data_destination;
hdma->Instance->NDTR = data_length;
}
// 启动DMA传输
void dma_start() {
// 启动DMA传输
HAL_DMA_Start(hdma, (uint32_t)&data_source, (uint32_t)&data_destination, data_length);
}
```
# 4. STM32单片机软件开发实战
### 4.1 C语言基础与STM32开发
#### 4.1.1 C语言基础
C语言是一种广泛使用的通用编程语言,以其高效、灵活和可移植性而闻名。在STM32开发中,C语言是主要的编程语言。
#### 4.1.2 STM32开发中的C语言
STM32单片机使用基于ARM Cortex-M内核的处理器,因此在STM32开发中使用的C语言是针对ARM架构进行了优化的。它支持ARM指令集和浮点运算,并提供了对STM32外设的直接访问。
### 4.2 HAL库的使用与外设驱动
#### 4.2.1 HAL库简介
HAL(硬件抽象层)库是STMicroelectronics提供的软件库,它封装了STM32外设的低级寄存器访问,提供了对STM32外设的统一、易于使用的接口。HAL库简化了外设配置和操作,降低了开发复杂度。
#### 4.2.2 HAL库的使用
使用HAL库时,首先需要初始化HAL库,然后使用HAL函数配置和操作外设。HAL函数以HAL_开头,后跟外设名称和操作。例如,要配置GPIO,可以使用HAL_GPIO_Init()函数。
```c
/* 初始化GPIOA的第5个引脚为输出模式 */
HAL_GPIO_Init(GPIOA, GPIO_PIN_5, GPIO_MODE_OUTPUT_PP, GPIO_NOPULL, GPIO_SPEED_FREQ_LOW);
```
#### 4.2.3 外设驱动
外设驱动是基于HAL库构建的,它提供了更高级别的外设功能。外设驱动封装了外设的复杂操作,简化了外设的使用。例如,可以使用UART驱动发送和接收数据。
### 4.3 RTOS(FreeRTOS)在STM32中的应用
#### 4.3.1 RTOS简介
RTOS(实时操作系统)是一种软件平台,它提供了任务调度、同步和通信机制。在STM32开发中,RTOS可以显著提高系统的实时性和可靠性。
#### 4.3.2 FreeRTOS简介
FreeRTOS是STM32开发中常用的RTOS之一。它是一个轻量级、开源的RTOS,具有出色的实时性能和低内存占用。
#### 4.3.3 FreeRTOS在STM32中的应用
使用FreeRTOS可以将应用程序分解为多个任务,每个任务执行特定的功能。任务由RTOS调度,确保它们按照优先级和时间限制执行。FreeRTOS还提供了同步机制(如信号量和互斥锁),以协调任务之间的通信和资源访问。
```c
/* 创建一个任务 */
TaskHandle_t taskHandle;
xTaskCreate(taskFunction, "TaskName", 1024, NULL, 1, &taskHandle);
/* 启动RTOS调度器 */
vTaskStartScheduler();
```
# 5. STM32单片机高级应用
### 5.1 STM32单片机与物联网(IoT)
#### 5.1.1 物联网简介
物联网(IoT)是指通过互联网将各种设备连接起来,实现数据收集、传输和处理,从而实现智能化管理和控制。STM32单片机凭借其低功耗、高性能和丰富的外设,成为物联网设备开发的理想选择。
#### 5.1.2 STM32单片机在物联网中的应用
STM32单片机在物联网中的应用十分广泛,包括:
- **传感器节点:**采集温度、湿度、光照等环境数据,并通过无线网络传输到云平台。
- **网关:**连接各种传感器节点,并负责数据处理、协议转换和云平台通信。
- **边缘计算设备:**在本地进行数据处理和分析,减少云平台的负载。
#### 5.1.3 STM32单片机物联网开发示例
**代码示例:**
```c
#include "stm32f4xx_hal.h"
#include "stm32f4xx_hal_i2c.h"
// I2C初始化
void I2C_Init(void)
{
I2C_HandleTypeDef hi2c;
hi2c.Instance = I2C1;
hi2c.Init.ClockSpeed = 100000;
hi2c.Init.DutyCycle = I2C_DUTYCYCLE_2;
HAL_I2C_Init(&hi2c);
}
// I2C数据传输
void I2C_Transmit(uint8_t *data, uint16_t size)
{
HAL_I2C_Master_Transmit(&hi2c, 0x55, data, size, 1000);
}
```
**说明:**
该代码示例展示了如何使用STM32单片机通过I2C总线传输数据,这是物联网设备与传感器之间通信的常用方式。
### 5.2 STM32单片机与人工智能(AI)
#### 5.2.1 人工智能简介
人工智能(AI)是计算机科学的一个分支,旨在让计算机像人一样思考和学习。STM32单片机凭借其强大的算力,可以支持各种AI算法的运行。
#### 5.2.2 STM32单片机在AI中的应用
STM32单片机在AI中的应用包括:
- **图像识别:**分析图像并识别物体、人脸等。
- **语音识别:**将语音转换成文本或指令。
- **机器学习:**通过训练算法,让计算机从数据中学习并做出预测。
#### 5.2.3 STM32单片机AI开发示例
**代码示例:**
```python
import tensorflow as tf
# 加载预训练模型
model = tf.keras.models.load_model('model.h5')
# 预测图像
image = tf.keras.preprocessing.image.load_img('image.jpg')
image = tf.keras.preprocessing.image.img_to_array(image)
image = np.expand_dims(image, axis=0)
predictions = model.predict(image)
# 输出预测结果
print(predictions)
```
**说明:**
该代码示例展示了如何使用TensorFlow框架在STM32单片机上进行图像识别。TensorFlow是一个流行的AI框架,提供了丰富的算法库和训练工具。
### 5.3 STM32单片机与图形用户界面(GUI)
#### 5.3.1 图形用户界面简介
图形用户界面(GUI)允许用户通过图形元素(如按钮、菜单、图标)与设备交互。STM32单片机支持多种GUI框架,可以轻松创建用户友好的界面。
#### 5.3.2 STM32单片机在GUI中的应用
STM32单片机在GUI中的应用包括:
- **触摸屏控制:**使用触摸屏作为输入设备,实现直观的人机交互。
- **液晶显示器控制:**显示文本、图形和动画,提供丰富的视觉信息。
- **嵌入式操作系统支持:**支持嵌入式操作系统(如FreeRTOS),提供多任务处理和GUI管理功能。
#### 5.3.3 STM32单片机GUI开发示例
**代码示例:**
```c
#include "stm32f4xx_hal.h"
#include "stm32f4xx_hal_ltdc.h"
// LTDC初始化
void LTDC_Init(void)
{
LTDC_HandleTypeDef hltdc;
hltdc.Instance = LTDC;
hltdc.Init.HorizontalSync = 40;
hltdc.Init.VerticalSync = 9;
hltdc.Init.AccumulatedHBP = 53;
hltdc.Init.AccumulatedVBP = 11;
hltdc.Init.AccumulatedActiveW = 480;
hltdc.Init.AccumulatedActiveH = 272;
hltdc.Init.TotalH = 525;
hltdc.Init.TotalV = 283;
HAL_LTDC_Init(&hltdc);
}
// LTDC显示图像
void LTDC_DisplayImage(uint8_t *image, uint16_t width, uint16_t height)
{
LTDC_LayerTypeDef layer;
layer.WindowX0 = 0;
layer.WindowY0 = 0;
layer.WindowWidth = width;
layer.WindowHeight = height;
layer.PixelFormat = LTDC_PIXEL_FORMAT_RGB565;
layer.Alpha = 255;
layer.Alpha0 = 0;
layer.BlendingFactor1 = LTDC_BLENDING_FACTOR1_PAxCA;
layer.BlendingFactor2 = LTDC_BLENDING_FACTOR2_PAxCA;
layer.FBStartAddress = (uint32_t)image;
HAL_LTDC_ConfigLayer(&hltdc, &layer, 0);
HAL_LTDC_ReloadDisplay(&hltdc);
}
```
**说明:**
该代码示例展示了如何使用STM32单片机通过LTDC控制器显示图像。LTDC是一个专门用于图形显示的硬件外设,可以实现高效的图像处理和显示。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 STM32 单片机论坛,这里是 STM32 开发者的知识宝库。我们汇集了业内资深专家的专业文章,涵盖从入门到精通的各个方面。
从基础的时钟配置和中断处理到高级的外设应用和嵌入式操作系统,我们的文章深入剖析了 STM32 单片机的各个方面。您将掌握从 I/O 端口操作到 DMA 机制、定时器应用、ADC 采样和通信接口的方方面面。
我们还提供有关存储器管理、固件升级、系统调试和仿真、故障诊断、电气设计、PCB 设计和嵌入式系统设计的全面指南。无论您是初学者还是经验丰富的工程师,我们的论坛都是您学习、分享和提升 STM32 开发技能的理想平台。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Java代码审计核心教程】:零基础快速入门与进阶策略
-Concept-in-Java.webp)
# 摘要
Java代码审计是保障软件安全性的重要手段。本文系统性地介绍了Java代码审计的基础概念、实践技巧、实战案例分析、进阶技能提升以及相关工具与资源。文中详细阐述了代码审计的各个阶段,包括准备、执行和报告撰写,并强调了审计工具的选择、环境搭建和结果整理的重要性。结合具体实战案例,文章
【Windows系统网络管理】:IT专家如何有效控制IP地址,3个实用技巧

# 摘要
本文主要探讨了Windows系统网络管理的关键组成部分,特别是IP地址管理的基础知识与高级策略。首先概述了Windows系统网络管理的基本概念,然后深入分析了IP地址的结构、分类、子网划分和地址分配机制。在实用技巧章节中,我们讨论了如何预防和解决IP地址冲突,以及IP地址池的管理方法和网络监控工具的使用。之后,文章转向了高级
【技术演进对比】:智能ODF架与传统ODF架性能大比拼

# 摘要
随着信息技术的快速发展,智能ODF架作为一种新型的光分配架,与传统ODF架相比,展现出诸多优势。本文首先概述了智能ODF架与传统ODF架的基本概念和技术架构,随后对比了两者在性能指标、实际应用案例、成本与效益以及市场趋势等方面的不同。智能ODF架通过集成智能管理系统,提高了数据传输的高效性和系统的可靠性,同时在安全性方面也有显著增强。通过对智能ODF架在不同部署场景中的优势展示和传统ODF架局限性的分析,本文还探讨
化工生产优化策略:工业催化原理的深入分析
# 摘要
本文综述了化工生产优化的关键要素,从工业催化的基本原理到优化策略,再到环境挑战的应对,以及未来发展趋势。首先,介绍了化工生产优化的基本概念和工业催化理论,包括催化剂的设计、选择、活性调控及其在工业应用中的重要性。其次,探讨了生产过程的模拟、流程调整控制、产品质量提升的策略和监控技术。接着,分析了环境法规对化工生产的影响,提出了能源管理和废物处理的环境友好型生产方法。通过案例分析,展示了优化策略在多相催化反应和精细化工产品生产中的实际应用。最后,本文展望了新型催化剂的开发、工业4.0与智能化技术的应用,以及可持续发展的未来方向,为化工生产优化提供了全面的视角和深入的见解。
# 关键字
MIPI D-PHY标准深度解析:掌握规范与应用的终极指南
# 摘要
MIPI D-PHY作为一种高速、低功耗的物理层通信接口标准,广泛应用于移动和嵌入式系统。本文首先概述了MIPI D-PHY标准,并深入探讨了其物理层特性和协议基础,包括数据传输的速率、通道配置、差分信号设计以及传输模式和协议规范。接着,文章详细介绍了MIPI D-PHY在嵌入式系统中的硬件集成、软件驱动设计及实际应用案例,同时提出了性能测试与验
【SAP BASIS全面指南】:掌握基础知识与高级技能

# 摘要
SAP BASIS是企业资源规划(ERP)解决方案中重要的技术基础,涵盖了系统安装、配置、监控、备份、性能优化、安全管理以及自动化集成等多个方面。本文对SAP BASIS的基础配置进行了详细介绍,包括系统安装、用户管理、系统监控及备份策略。进一步探讨了高级管理技
【Talend新手必读】:5大组件深度解析,一步到位掌握数据集成
# 摘要
Talend是一款强大的数据集成工具,本文首先介绍了Talend的基本概念和安装配置方法。随后,详细解读了Talend的基础组件,包括Data Integration、Big Data和Cloud组件,并探讨了各自的核心功能和应用场景。进阶章节分析了Talend在实时数据集成、数据质量和合规性管理以及与其他工
网络安全新策略:Wireshark在抓包实践中的应用技巧

# 摘要
Wireshark作为一款强大的网络协议分析工具,广泛应用于网络安全、故障排除、网络性能优化等多个领域。本文首先介绍了Wireshark的基本概念和基础使用方法,然后深入探讨了其数据包捕获和分析技术,包括数据包结构解析和高级设置优化。文章重点分析了Wireshark在网络安全中的应用,包括网络协议分析、入侵检测与响应、网络取证与合规等。通过实
三角形问题边界测试用例的测试执行与监控:精确控制每一步

# 摘要
本文针对三角形问题的边界测试用例进行了深入研究,旨在提升测试用例的精确性和有效性。文章首先概述了三角形问题边界测试用例的基础理论,包括测试用例设计原则、边界值分析法及其应用和实践技巧。随后,文章详细探讨了三角形问题的定义、分类以及测试用例的创建、管理和执行过程。特别地,文章深入分析了如何控制测试环境与用例的精确性,并探讨了持续集成与边界测试整合的可能性。在测试结果分析与优化方面,本文提出了一系列故障分析方法和测试流程改进策略。最后,文章展望了边界
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )