ESP32-IDF与BMI160传感器连接
发布时间: 2024-04-03 05:56:45 阅读量: 20 订阅数: 19 
# 1. 介绍ESP32开发板及其特性
## 1.1 ESP32的简介和功能介绍
ESP32是由乐鑫科技推出的一款集成Wi-Fi和蓝牙功能的低功耗系统级芯片,其主要特点包括:
- 双核处理器,工作频率高达240MHz
- 支持Wi-Fi和蓝牙BLE连接
- 低功耗设计,适合物联网应用
- 丰富的GPIO接口和外设支持
- 强大的开发环境和社区支持
## 1.2 ESP-IDF开发框架概述
ESP-IDF是ESP32的官方开发框架,提供丰富的API和工具,方便开发者进行固件的开发和调试。主要特点包括:
- 基于FreeRTOS实现的RTOS支持
- 支持多种通信协议和外设驱动
- 丰富的示例代码和文档
- 灵活的编译和调试工具链
## 1.3 ESP32与其他开发板的对比
相较于其他开发板,ESP32具有以下优势:
- 较低的成本和功耗
- 丰富的外设支持和灵活性
- 社区活跃,资源丰富
- 完善的开发工具链和文档支持
在接下来的章节中,我们将介绍如何将ESP32与BMI160传感器连接,并实现数据的读取和处理。
# 2. BMI160传感器概述与特性介绍
在这一章中,我们将深入探讨BMI160传感器的工作原理、主要特性和应用领域,以及选择BMI160传感器与ESP32结合的原因。接下来让我们一起来了解BMI160传感器的相关内容。
# 3. 连接ESP32和BMI160传感器
在本章中,我们将介绍如何连接ESP32开发板和BMI160传感器,以便于后续实现数据的读取和处理。
#### 3.1 ESP32与BMI160传感器的硬件连接方式
在连接ESP32和BMI160传感器之前,确保你已经准备好以下硬件设备:
- 1个ESP32开发板
- 1个BMI160传感器
- 杜邦线若干条
接下来,按照以下步骤连接ESP32和BMI160传感器:
1. 将ESP32和BMI160传感器连接线按照以下对应关系进行连接:
- ESP32 3V3引脚连接BMI160传感器VDDIO引脚
- ESP32 GND引脚连接BMI160传感器GND引脚
- ESP32 SDA引脚连接BMI160传感器SDI引脚
- ESP32 SCL引脚连接BMI160传感器SCK引脚
2. 确保连接无误后,即可进行下一步配置。
#### 3.2 在ESP-IDF中配置BMI160传感器驱动程序
为了让ESP32能够与BMI160传感器进行通讯,我们需要在ESP-IDF中配置BMI160传感器的驱动程序。在IDF中,你可以通过以下方式实现:
```c
// 示例代码
#include "bmi160.h"
// 在初始化中调用BMI160驱动程序
bmi160_init();
```
#### 3.3 编写代码实现ESP32与BMI160的通讯
接下来,我们需要编写代码实现ESP32与BMI160传感器的通讯。以下是一个简单示例代码:
```c
// 示例代码
#include "bmi160.h"
void read_sensor_data(){
struct bmi160_sensor_data accel_data, gyro_data;
// 读取加速度传感器数据
bmi160_get_sensor_data(BMI160_ACCEL_SEL, &accel_data, NULL);
// 读取陀螺仪传感器数据
bmi160_get_sensor_data(BMI160_GYRO_SEL, &gyro_data, NULL);
// 处理数据或进行其他操作
}
```
通过以上步骤,我们成功实现了ESP32与BMI160传感器的连接和通讯。在接下来的章节中,我们将深入探讨如何读取并处理BMI160传感器数据。
# 4. 利用ESP-IDF读取并处理BMI160传感器数据
在这一章节中,我们将介绍如何使用ESP32和BMI160传感器结合,通过ESP-IDF来读取并处理传感器数据。这包括使用SPI或I2C协议读取传感器数据,解析数据并对其进行处理,最终实现实时监控、显示或记录传感器数据的功能。
#### 4.1 通过SPI或I2C协议读取BMI160传感器数据
首先,我们需要在ESP32中配置好BMI160传感器的连接方式,这可以通过连接BMI160传感器的SDI和SCK引脚到ESP32的对应引脚,然后在ESP-IDF中配置SPI或I2C协议相关设置。
对于SPI连接,我们需要在初始化时指定SPI总线和引脚连接,如下所示:
```c
spi_device_interface_config_t spi_cfg = {
.command_bits = 8,
.address_bits = 0,
.clock_speed_hz = 10000000,
.mode = 0,
.spics_io_num = PIN_NUM_CS,
.queue_size = 1,
};
spi_bus_add_device(SPI2_HOST, &spi_cfg, &spi_dev);
```
对于I2C连接,我们需要在初始化时指定I2C总线和地址,如下所示:
```c
i2c_config_t conf = {
.mode = I2C_MODE_MASTER,
.sda_io_num = I2C_MASTER_SDA_IO,
.sda_pullup_en = GPIO_PULLUP_ENABLE,
.scl_io_num = I2C_MASTER_SCL_IO,
.scl_pullup_en = GPIO_PULLUP_ENABLE,
.master.clk_speed = I2C_MASTER_FREQ_HZ,
};
i2c_param_config(I2C_NUM_0, &conf);
i2c_driver_install(I2C_NUM_0, I2C_MODE_MASTER, 0, 0, 0);
```
#### 4.2 在ESP32中解析和处理BMI160传感器数据
一旦连接配置完成,我们就可以开始读取传感器数据,并对其进行解析和处理。根据BMI160传感器的数据手册,我们可以通过SPI或I2C协议读取加速度计和陀螺仪的原始数据。
下面是一个简单的示例代码,演示如何读取加速度计数据:
```c
// 读取加速度计数据
int16_t raw_acc_data[3];
bmi160_read_accel_xyz(&sensor, raw_acc_data);
// 将原始数据转换为实际加速度值
float acc_x = (float)raw_acc_data[0] * ACC_CONVERSION;
float acc_y = (float)raw_acc_data[1] * ACC_CONVERSION;
float acc_z = (float)raw_acc_data[2] * ACC_CONVERSION;
```
#### 4.3 实时监控、显示或记录传感器数据
最后,我们可以将解析后的传感器数据实时显示在串行监视器上,或者通过WiFi或蓝牙模块发送到远程服务器进行监控或记录。这可以通过ESP-IDF提供的组件来实现,如使用UART输出数据或使用ESP32的网络功能发送数据。
通过本章内容的指导,我们可以成功利用ESP32和BMI160传感器结合,实现对传感器数据的读取和处理,为后续的应用开发奠定基础。
# 5. 优化与调试
在本节中,我们将探讨如何优化和调试ESP32与BMI160传感器的连接和数据处理过程。通过优化数据传输和处理算法,可以提升系统性能和准确性,同时解决常见问题和调试技巧也将有助于项目开发的顺利进行。
#### 5.1 数据传输的优化与提升性能
对于ESP32与BMI160传感器间的数据传输,可以采取以下几点来优化传输效率和性能:
```python
# 代码示例 - 使用DMA进行SPI数据传输
import esp32
from machine import SPI, Pin
# 初始化SPI
spi = SPI(2, baudrate=1000000, sck=Pin(18), mosi=Pin(23), miso=Pin(19))
dma = esp32.RMT(period=10, pin=25)
# 通过DMA进行SPI数据传输
def spi_dma_transfer(data_out):
buf = bytearray(data_out)
dma.write_pulses(buf, spi, 1) # 1为CS引脚
```
#### 5.2 处理传感器数据的算法优化
处理来自BMI160传感器的数据时,可以结合滤波算法和数据处理技巧来优化数据质量和准确性:
```java
// 代码示例 - 使用卡尔曼滤波进行数据处理
import org.ejml.simple.SimpleMatrix;
public class KalmanFilter {
private SimpleMatrix state; // 状态矩阵
private SimpleMatrix errorCovariance; // 误差协方差矩阵
private SimpleMatrix processNoise; // 过程噪声方差
// 初始化卡尔曼滤波器
public KalmanFilter(SimpleMatrix initialState, SimpleMatrix initialErrorCovariance, SimpleMatrix initialProcessNoise) {
state = initialState;
errorCovariance = initialErrorCovariance;
processNoise = initialProcessNoise;
}
// 更新卡尔曼滤波器状态
public void update(SimpleMatrix measurement, SimpleMatrix measurementNoise) {
// 更新状态估计
SimpleMatrix predictedState = state; // 预测状态
SimpleMatrix predictedErrorCovariance = errorCovariance.plus(processNoise); // 预测误差协方差
// 更新增益矩阵
SimpleMatrix kalmanGain = predictedErrorCovariance.divide(predictedErrorCovariance.plus(measurementNoise));
// 更新状态估计和误差协方差
state = predictedState.plus(kalmanGain.mult(measurement.minus(predictedState)));
errorCovariance = predictedErrorCovariance.minus(kalmanGain.mult(predictedErrorCovariance));
}
}
```
#### 5.3 常见问题解决与调试技巧分享
在项目开发过程中,可能会遇到传感器数据不准确、通讯故障等问题,以下是一些常见问题的解决方法和调试技巧:
- **问题:传感器数据不准确**
- **解决方法:**检查传感器连接是否稳定,校准传感器,优化数据处理算法。
- **问题:通讯故障**
- **解决方法:**检查硬件连接是否正确,调整通讯协议参数,增加错误处理机制。
通过优化和调试,可以使ESP32与BMI160传感器的连接更加稳定和可靠,确保项目的顺利进行。
# 6. 案例及应用场景
在本章中,我们将探讨利用ESP32与BMI160传感器结合的案例及应用场景,展示这种技术结合在实际中的应用和潜力。
#### 6.1 实时姿态监测与数据记录
通过ESP32与BMI160传感器连接,可以实现对物体的实时姿态监测和数据记录。例如,可以将传感器数据用于监测运动员的姿势,记录身体的姿态变化,以实现运动训练的监控和指导。整合传感器数据,并结合算法分析,可以得出运动员在训练中的姿势是否正确、持续时间等相关数据,为训练提供科学依据。
```python
# 代码示例:
# 姿态监测及数据记录
import time
while True:
# 读取BMI160传感器数据
data = read_bmi160_data()
# 数据处理与记录
process_data(data)
time.sleep(0.1)
```
**代码解释:**
- `read_bmi160_data()`函数用于从传感器中读取数据。
- `process_data()`函数用于对读取的数据进行处理,并记录相关信息。
**结果说明:**
该示例代码可以实时监测姿态并记录相关数据,为训练提供参考依据。
#### 6.2 室内导航系统
利用ESP32和BMI160传感器,可以实现室内导航系统的开发。通过在建筑物中布置传感器节点,结合ESP32进行数据处理和定位算法,用户可以借助手机或其他设备在室内精准导航,如在购物中心、医院等场所提供定位服务,大大提升用户体验。
```java
// 代码示例:
// 室内导航系统
public class IndoorNavigation {
public static void main(String[] args) {
// 获取传感器数据
SensorData data = getSensorData();
// 定位算法处理
IndoorLocation location = processSensorData(data);
System.out.println("当前位置:" + location);
}
}
```
**代码解释:**
- `getSensorData()`方法用于获取传感器数据。
- `processSensorData()`方法用于处理传感器数据并进行定位算法处理。
**结果说明:**
通过该示例代码,可以实现室内导航系统,提供用户精准的室内定位服务。
#### 6.3 IoT应用中的体感控制技术
在IoT应用中,ESP32与BMI160传感器结合可用于体感控制技术的开发。通过传感器获取用户的体感反馈,如手势、姿势等,将数据传输至IoT设备,实现对设备的远程控制。例如,用户可以通过手势控制智能家居设备的开关、音量调节等功能。
```javascript
// 代码示例:
// IoT体感控制
function gestureControl() {
// 读取传感器数据
let sensorData = readSensorData();
// 解析手势数据
let gesture = parseGesture(sensorData);
// 控制IoT设备
controlIoTDevice(gesture);
}
```
**代码解释:**
- `readSensorData()`函数用于获取传感器数据。
- `parseGesture()`函数用于解析传感器数据中的手势信息。
- `controlIoTDevice()`函数用于根据手势信息控制IoT设备的操作。
**结果说明:**
以上代码展示了如何利用体感控制技术实现对IoT设备的控制,提升用户的操作体验。
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏旨在提供全面的 ESP32-IDF 和 BMI160 姿态解算指南。专栏涵盖以下主题:
* ESP32-IDF 和 BMI160 传感器介绍
* ESP32-IDF 环境搭建和配置
* ESP32-IDF 与 BMI160 传感器连接
* ESP32-IDF 数据处理和校准
* ESP32-IDF 中的姿态解算算法实现
* ESP32-IDF 中的姿态解算算法优化
* ESP32-IDF 中的数据可视化实现
* ESP32-IDF 中的姿态控制原理
* ESP32-IDF 中的运动追踪算法介绍
* ESP32-IDF 中的运动追踪算法实现
* ESP32-IDF 中的电源管理优化
* ESP32-IDF 中的低功耗设计指南
* ESP32-IDF 中的嵌入式系统调试技巧
* ESP32-IDF 中的固件升级和 OTA
* ESP32-IDF 中的传感器融合实现
* ESP32-IDF 中的传感器数据滤波技术
* ESP32-IDF 中的用户界面设计和优化
通过本专栏,读者可以深入了解 ESP32-IDF 和 BMI160 传感器,并掌握姿态解算、运动追踪和嵌入式系统开发的技能。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【实战演练】使用Docker与Kubernetes进行容器化管理
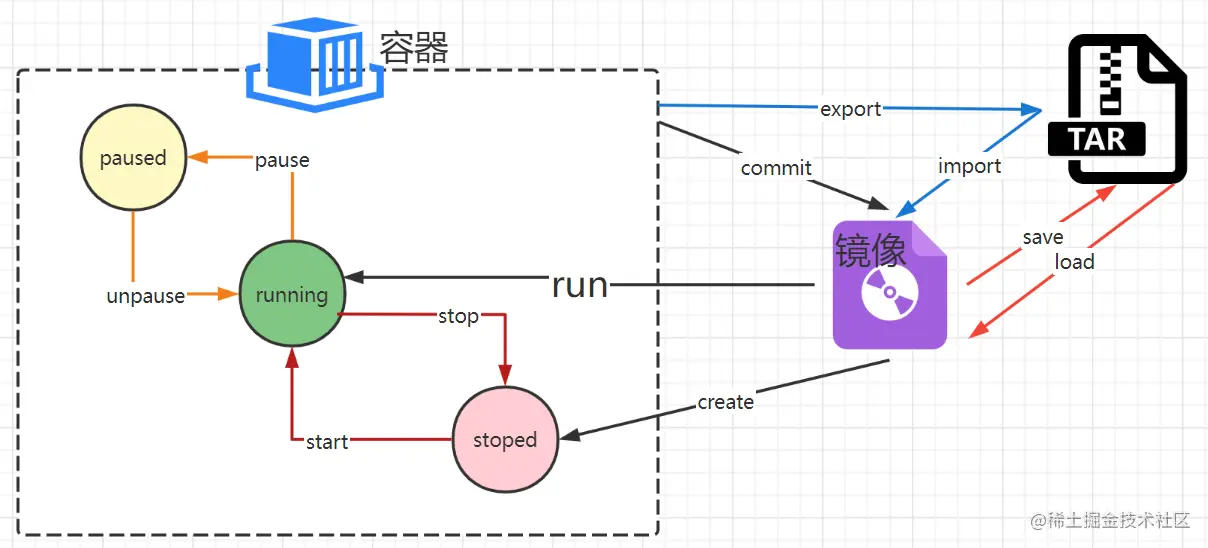
# 2.1 Docker容器的基本概念和架构
Docker容器是一种轻量级的虚拟化技术,它允许在隔离的环境中运行应用程序。与传统虚拟机不同,Docker容器共享主机内核,从而减少了资源开销并提高了性能。
Docker容器基于镜像构建。镜像是包含应用程序及
【实战演练】综合案例:数据科学项目中的高等数学应用

# 1. 数据科学项目中的高等数学基础**
高等数学在数据科学中扮演着至关重要的角色,为数据分析、建模和优化提供了坚实的理论基础。本节将概述数据科学
【实战演练】时间序列预测项目:天气预测-数据预处理、LSTM构建、模型训练与评估

# 1. 时间序列预测概述**
时间序列预测是指根据历史数据预测未来值。它广泛应用于金融、天气、交通等领域,具有重要的实际意义。时间序列数据通常具有时序性、趋势性和季节性等特点,对其进行预测需要考虑这些特性。
# 2. 数据预处理
### 2.1 数据收集和清洗
#### 2.1.1 数据源介绍
时间序列预测模型的构建需要可靠且高质量的数据作为基础。数据源的选择至关重要,它将影响模型的准确性和可靠性。常见的时序数据源包括:
【实战演练】深度学习在计算机视觉中的综合应用项目

# 1. 计算机视觉概述**
计算机视觉(CV)是人工智能(AI)的一个分支,它使计算机能够“看到”和理解图像和视频。CV 旨在赋予计算机人类视觉系统的能力,包括图像识别、对象检测、场景理解和视频分析。
CV 在广泛的应用中发挥着至关重要的作用,包括医疗诊断、自动驾驶、安防监控和工业自动化。它通过从视觉数据中提取有意义的信息,为计算机提供环境感知能力,从而实现这些应用。
# 2.1 卷积
【进阶】入侵检测系统简介

# 1. 入侵检测系统概述**
入侵检测系统(IDS)是一种网络安全工具,用于检测和预防未经授权的访问、滥用、异常或违反安全策略的行为。IDS通过监控网络流量、系统日志和系统活动来识别潜在的威胁,并向管理员发出警报。
IDS可以分为两大类:基于网络的IDS(NIDS)和基于主机的IDS(HIDS)。NIDS监控网络流量,而HIDS监控单个主机的活动。IDS通常使用签名检测、异常检测和行
【实战演练】通过强化学习优化能源管理系统实战
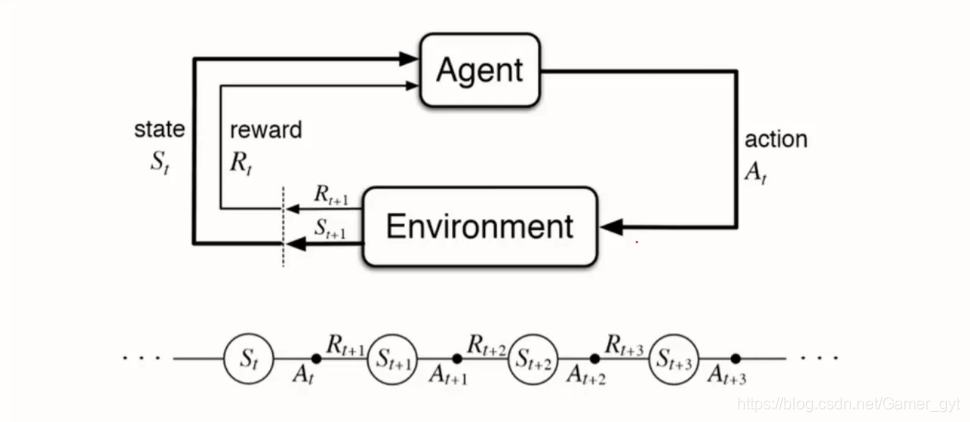
# 2.1 强化学习的基本原理
强化学习是一种机器学习方法,它允许智能体通过与环境的交互来学习最佳行为。在强化学习中,智能体通过执行动作与环境交互,并根据其行为的
【实战演练】python云数据库部署:从选择到实施
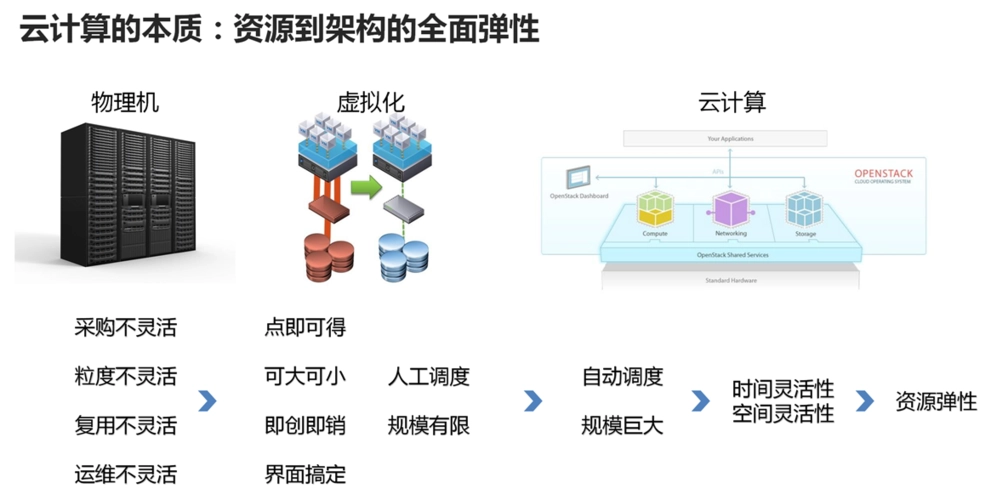
# 2.1 云数据库类型及优劣对比
**关系型数据库(RDBMS)**
* **优点:**
* 结构化数据存储,支持复杂查询和事务
* 广泛使用,成熟且稳定
* **缺点:**
* 扩展性受限,垂直扩展成本高
* 不适合处理非结构化或半结构化数据
**非关系型数据库(NoSQL)**
* **优点:**
* 可扩展性强,水平扩展成本低
【实战演练】虚拟宠物:开发一个虚拟宠物游戏,重点在于状态管理和交互设计。
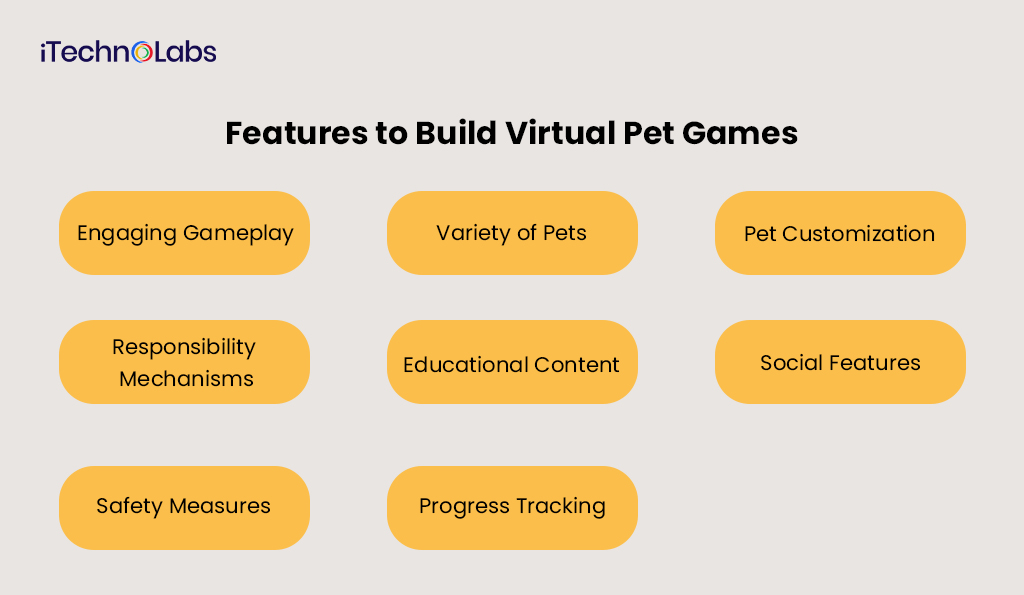
# 2.1 虚拟宠物的状态模型
### 2.1.1 宠物的基本属性
虚拟宠物的状态由一系列基本属性决定,这些属性描述了宠物的当前状态,包括:
- **生命值 (HP)**:宠物的健康状况,当 HP 为 0 时,宠物死亡。
- **饥饿值 (Hunger)**:宠物的饥饿程度,当 Hunger 为 0 时,宠物会饿死。
- **口渴
【实战演练】前沿技术应用:AutoML实战与应用

# 1. AutoML概述与原理**
AutoML(Automated Machine Learning),即自动化机器学习,是一种通过自动化机器学习生命周期
【实战演练】构建简单的负载测试工具

# 1. 负载测试基础**
负载测试是一种性能测试,旨在模拟实际用户负载,评估系统在高并发下的表现。它通过向系统施加压力,识别瓶颈并验证系统是否能够满足预期性能需求。负载测试对于确保系统可靠性、可扩展性和用户满意度至关重要。
# 2. 构建负载测试工具
### 2.1 确定测试目标和指标
在构建负载测试工具之前,至关重要的是确定测试目标和指标。这将指导工具的设计和实现。以下是一些需要考虑的关键因素:
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )