离散时间控制系统:时域分析与设计方法
发布时间: 2024-03-03 06:17:52 阅读量: 88 订阅数: 50 

离散时间系统时域分析与仿真.doc
# 1. 离散时间控制系统概述
## 1.1 离散时间控制系统基本概念
在现代控制理论中,离散时间控制系统是一种重要的控制系统形式。离散时间控制系统是指系统状态、控制输入和输出在离散时间点上取值,系统演变的时间是以一系列固定的时间间隔进行的。离散时间控制系统由信号采样、数字信号处理、控制器计算和执行等过程组成,广泛应用于各种自动化系统中。
## 1.2 离散时间控制系统与连续时间控制系统的区别
离散时间控制系统与连续时间控制系统相比,其核心区别在于信号的变化方式。连续时间系统中,信号是连续变化的,而离散时间系统中,信号是在离散时间点上变化的。这导致了两者在建模、分析和设计方法上有所不同。
## 1.3 离散时间控制系统的应用领域
离散时间控制系统在工业自动化、通信系统、数字信号处理、机器人控制等领域有着广泛的应用。通过离散时间控制系统,可以实现对系统的精准控制和实时监测,提高系统的稳定性和性能。
在下一个章节中,我们将深入探讨离散时间控制系统的数学模型,以便更好地理解和应用这一控制系统形式。
# 2. 离散时间控制系统的数学模型
离散时间控制系统的数学模型是描述系统动态特性的重要工具,它包括了离散时间信号与离散时间系统、离散时间控制系统的数学表示以及离散时间系统的稳定性分析等内容。
### 2.1 离散时间信号与离散时间系统
离散时间信号是在不连续的时间点上取值的信号,通常用数学序列表示。离散时间系统则是对离散时间信号进行处理的系统,其输入、输出以及状态均在离散时间点上进行变化。
#### 代码示例(Python):
```python
import numpy as np
# 生成离散时间信号
n = np.arange(0, 10) # 时间点序列
x = 2**n # 以2为底的指数序列
# 定义离散时间系统
def discrete_system(input_signal):
output_signal = np.zeros_like(input_signal)
for i in range(1, len(input_signal)):
output_signal[i] = 0.5 * input_signal[i] + 0.5 * input_signal[i-1] # 离散时间系统处理(示例)
return output_signal
# 应用离散时间系统
y = discrete_system(x)
```
#### 代码说明:
- 生成离散时间信号序列n以及对应值x
- 定义离散时间系统函数,对输入信号进行处理得到输出信号
- 应用离散时间系统得到输出信号y
### 2.2 离散时间控制系统的数学表示
离散时间控制系统的数学模型可以用差分方程、状态方程或者传递函数进行描述,这些数学表示能够准确反映系统在离散时间下的动态特性。
#### 代码示例(Java):
```java
public class DiscreteTimeControlSystem {
// 差分方程表示
public double differenceEquation(int[] input, int n) {
double output = 0;
for (int i = 1; i <= n; i++) {
output += 0.5 * input[i] + 0.5 * input[i-1]; // 离散时间系统处理(示例)
}
return output;
}
// 状态方程表示
public double[] stateEquation(int[] input, int n) {
double[] output = new double[n];
for (int i = 1; i <= n; i++) {
output[i] = 0.3 * input[i] - 0.2 * input[i-1]; // 离散时间系统处理(示例)
}
return output;
}
}
```
#### 代码说明:
- 使用Java类表示离散时间控制系统
- 差分方程表示通过迭代计算输出值
- 状态方程表示直接计算得到输出值的数组
### 2.3 离散时间系统的稳定性分析
离散时间系统的稳定性分析是指通过数学方法判断系统在离散时间下的稳定行为,通常涉及零输入响应、零状态响应,以及系统特征方程的根位置等内容。
#### 代码示例(Python):
```python
import numpy as np
# 求解离散时间系统的稳定性
def stability_analysis(coefficients):
characteristic_equation_roots = np.roots(coefficients) # 求特征方程的根
if np.all(np.abs(characteristic_equation_roots) < 1): # 判断特征方程的根的模是否均小于1
return "The system is stable."
else:
return "The system is unstable."
# 示例:特征方程系数
coefficients = [1, -0.5, 0.1] # 对应特征方程为:1 - 0.5z^(-1) + 0.1z^(-2)
# 应用稳定性分析函数
result = stability_analysis(coefficients)
print(result)
```
#### 代码说明:
- 使用Numpy库求解特征方程的根
- 判断特征方程的根是否均在单位圆内,给出系统稳定性判断
本章节通过数学模型描述了离散时间控制系统的基本概念,包括离散时间信号与离散时间

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《自动控制原理(二)》专栏深入探讨了控制系统领域的重要概念和方法。文章涵盖了传递函数与系统响应的理论,帮助读者更好地理解控制系统的输出特性;PID控制器的基本原理与应用,为控制系统设计提供了有效的工具;频域分析揭示了控制系统的频率响应规律,为系统性能分析提供了新视角;状态空间法讨论了现代控制理论的基础,开拓了读者的思维;离散时间控制系统的时域分析与设计方法,帮助读者深入了解离散时间系统的特点;神经网络、自适应控制系统、多变量控制系统和模型预测控制等先进方法的应用,展示了控制系统领域的前沿技术和未来发展方向。此外,机器学习在控制系统中的应用也为读者呈现了控制系统和人工智能的融合趋势。通过本专栏的学习,读者能够全面了解控制系统理论和方法,为工程领域的应用提供有力支持。
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【CMOS集成电路设计实战解码】:从基础到高级的习题详解,理论与实践的完美融合
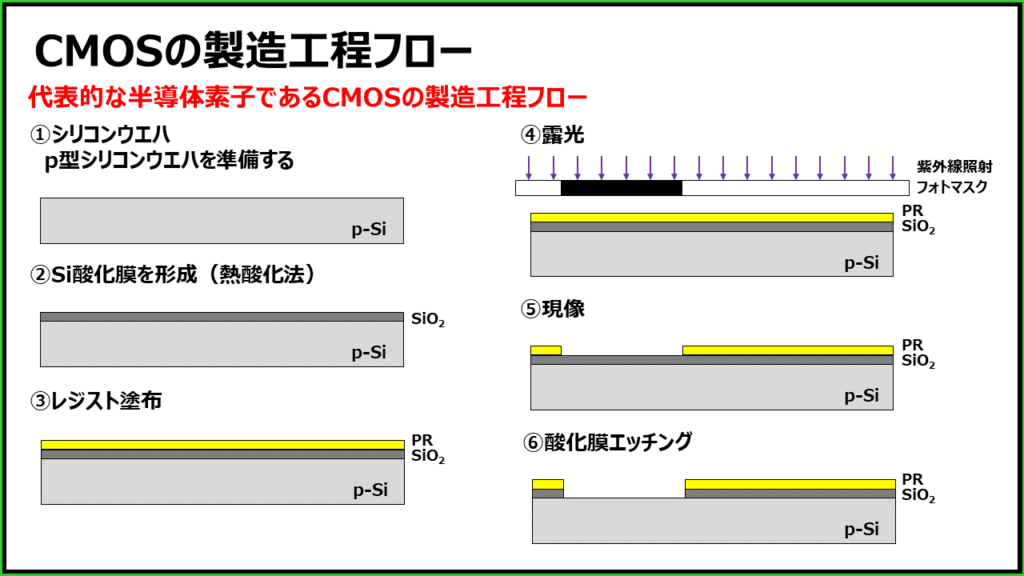
# 摘要
CMOS集成电路设计是现代电子系统中不可或缺的一环,本文全面概述了CMOS集成电路设计的关键理论和实践操作。首先,介绍了CMOS技术的基础理论,包括晶体管工作机制、逻辑门设计基础、制造流程和仿真分析。接着,深入探讨了CMOS集成电路的设计实践,涵盖了反相器与逻辑门设计、放大器与模拟电路设计,以及时序电路设计。此外,本文还
CCS高效项目管理:掌握生成和维护LIB文件的黄金步骤
# 摘要
本文深入探讨了CCS项目管理和LIB文件的综合应用,涵盖了项目设置、文件生成、维护优化以及实践应用的各个方面。文中首先介绍了CCS项目的创建与配置、编译器和链接器的设置,然后详细阐述了LIB文件的生成原理、版本控制和依赖管理。第三章重点讨论了LIB文件的代码维护、性能优化和自动化构建。第四章通过案例分析了LIB文件在多项目共享、嵌入式系统应用以及国际化与本地化处理中的实际应
【深入剖析Visual C++ 2010 x86运行库】:架构组件精讲
# 摘要
Visual C++ 2010 x86运行库是支持开发的关键组件,涵盖运行库架构核心组件、高级特性与实现,以及优化与调试等多个方面。本文首先对运行库的基本结构、核心组件的功能划分及其交互机制进行概述。接着,深入探讨运行时类型信息(RTTI)与异常处理的工作原理和优化策略,以及标准C++内存管理接口和内存分配与释放策略。本文还阐述了运行库的并发与多线程支持、模板与泛型编程支持,
从零开始掌握ACD_ChemSketch:功能全面深入解读
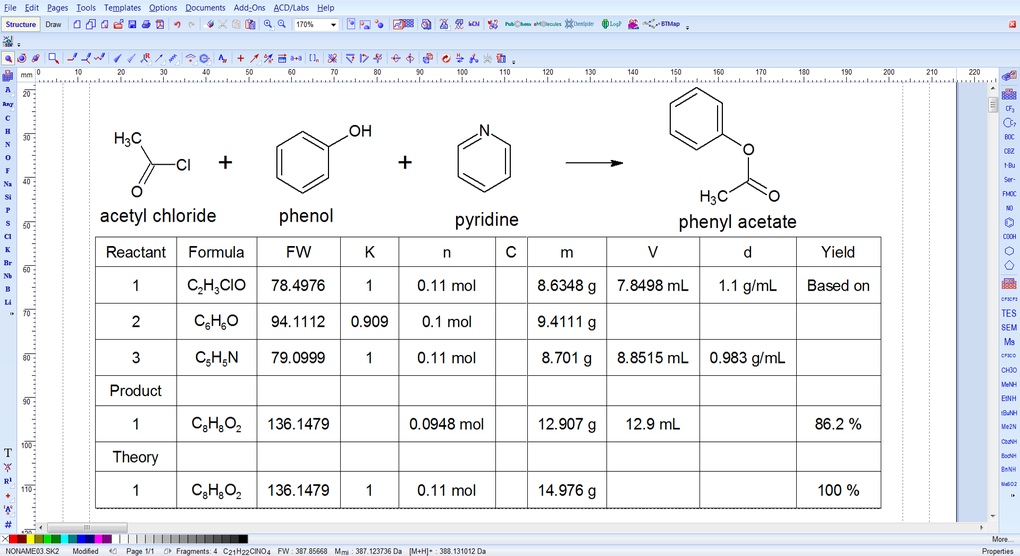
# 摘要
ACD_ChemSketch是一款广泛应用于化学领域的绘图软件,本文概述了其基础和高级功能,并探讨了在科学研究中的应用。通过介绍界面布局、基础绘图工具、文件管理以及协作功能,本文为用户提供了掌握软件操作的基础知识。进阶部分着重讲述了结构优化、立体化学分析、高
蓝牙5.4新特性实战指南:工业4.0的无线革新

# 摘要
蓝牙技术是工业4.0不可或缺的组成部分,它通过蓝牙5.4标准实现了新的通信特性和安全机制。本文详细概述了蓝牙5.4的理论基础,包括其新增功能、技术规格,以及与前代技术的对比分析。此外,探讨了蓝牙5.4在工业环境中网络拓扑和设备角色的应用,并对安全机制进行了评估。本文还分析了蓝牙5.4技术的实际部署,包
【Linux二进制文件执行错误深度剖析】:一次性解决执行权限、依赖、环境配置问题(全面检查必备指南)

# 摘要
本文详细探讨了二进制文件执行过程中遇到的常见错误,并提出了一系列理论与实践上的解决策略。首先,针对执行权限问题,文章从权限基础理论出发,分析了权限设置不当所导致的错误,并探讨了修复权限的工具和方法。接着,文章讨论了依赖问题,包括依赖管理基础、缺失错误分析以及修复实践,并对比了动态与静态依赖。环境配置问题作为另一主要焦点,涵盖了
差分输入ADC滤波器设计要点:实现高效信号处理
# 摘要
本论文详细介绍了差分输入模数转换器(ADC)滤波器的设计与实践应用。首先概述了差分输入ADC滤波器的理论基础,包括差分信号处理原理、ADC的工作原理及其类型,以及滤波器设计的基本理论。随后,本研究深入探讨了滤波器设计的实践过程,从确定设计规格、选择元器件到电路图绘制、仿真、PCB布局,以及性能测试与验证的方法。最后,论文分析了提高差分输入ADC滤波器性能的优化策略,包括提升精
【HPE Smart Storage性能提升指南】:20个技巧,优化存储效率

# 摘要
本文深入探讨了HPE Smart Storage在性能管理方面的方法与策略。从基础性能优化技巧入手,涵盖了磁盘配置、系统参数调优以及常规维护和监控等方面,进而探讨高级性能提升策略,如缓存管理、数据管理优化和负载平衡。在自动化和虚拟化环境下,本文分析了如何利用精简配置、快照技术以及集成监控解决方案来进一步提升存储性能,并在最后章节中讨论了灾难恢复与备份策略的设计与实施。通过案
【毫米波雷达性能提升】:信号处理算法优化实战指南

# 摘要
毫米波雷达信号处理是一个涉及复杂数学理论和先进技术的领域,对于提高雷达系统的性能至关重要。本文首先概述了毫米波雷达信号处理的基本理论,包括傅里叶变换和信号特性分析,然后深入探讨了信号处理中的关键技术和算法优化策略。通过案例分析,评估了现有算法性能,并介绍了信号处理软件实践和代码优化技巧。文章还探讨了雷达系统的集成、测试及性能评估方法,并展望了未来毫米波雷达性能提升的技术趋
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )