【汇川机器人长效运行秘诀】:维护与保养的全面指南
发布时间: 2024-12-01 15:08:44 阅读量: 37 订阅数: 43 

汇川机器人维护保养SOP

参考资源链接:[汇川四轴机器人编程手册:InoTeachPad示教与编程指南](https://wenku.csdn.net/doc/6475a3eed12cbe7ec319bfdc?spm=1055.2635.3001.10343)
# 1. 汇川机器人技术概述与长效运行的重要性
## 1.1 机器人技术的演进
在自动化和智能制造领域,汇川机器人代表着先进的生产力。从简单的机械臂到复杂的协作机器人,技术不断演进,以适应日益复杂的工业需求。正确理解这些技术的演变有助于更好地维护和延长其使用寿命。
## 1.2 长效运行的必要性
机器人作为精密设备,其长效运行对于保持生产效率和质量至关重要。对于拥有高资本投入的制造业而言,设备的高可靠性直接关联到企业的投资回报率和市场竞争力。
## 1.3 维护策略的重要性
良好的维护策略可以预防故障、降低维修成本,并延长机器人的使用寿命。通过分析和应用最佳实践,可以确保机器人在全生命周期内均能高效运行。
# 2. 汇川机器人硬件维护技巧
## 2.1 核心部件的检查与更换
### 2.1.1 关键传感器的校准方法
关键传感器是机器人感知外部环境的“眼睛”,其校准精度直接关系到机器人的性能。传感器校准应按照以下步骤进行:
1. **校准前的准备**:确保机器人在平稳的地面上,外部环境稳定,无强烈的电磁干扰。同时,对传感器进行物理清洁,避免灰尘和污物影响校准的准确性。
2. **进入校准模式**:根据汇川机器人的操作手册,启动传感器校准模式。这通常涉及到通过控制面板或专用软件输入特定的命令。
3. **执行校准**:遵循手册中的指示,使用已知精度的校准工具(例如标定板、标准距离块等)对传感器进行校准。
4. **参数设置**:对传感器的输出数据进行分析,调整相关参数,确保其输出与实际测量值一致。
5. **校准验证**:完成校准后,进行实际的测试运行,验证校准数据是否有效。
代码块示例(汇川机器人传感器校准脚本):
```python
# Python 伪代码示例,实际使用需根据机器人具体型号和编程接口进行调整。
import hunan_robotics
# 初始化机器人控制系统
robot = hunan_robotics.RobotControlSystem()
# 启动传感器校准模式
robot.start_calibration_mode()
# 假设的传感器校准函数
def calibrate_sensor(sensor_type, calibration_tool):
# 对传感器进行校准处理
sensor_data = robot.read_sensor_data(sensor_type)
calibrated_data = robot.calibrate_with_tool(sensor_data, calibration_tool)
robot.set_sensor_parameters(calibrated_data)
return calibrated_data
# 校准特定类型的传感器
calibrated_result = calibrate_sensor('vision_sensor', 'standard_block')
if robot.validate_calibration(calibrated_result):
print("传感器校准成功")
else:
print("传感器校准失败,请重新校准")
```
参数说明:
- `sensor_type`: 校准的传感器类型(如视觉传感器、距离传感器等)。
- `calibration_tool`: 使用的校准工具,用于提供标准参考值。
逻辑分析:
校准过程涉及到从传感器读取数据,与已知的校准工具值进行比较,并据此调整传感器的输出参数,直到达到预定的精度。这个过程需要多次迭代,直到结果满足预设的精度要求。
### 2.1.2 驱动与执行元件的维护周期
驱动与执行元件是机器人执行动作的基础,需要定期进行检查和更换,以保持最佳性能。以下为维护周期的建议:
1. **日常检查**:每天或每次使用后检查驱动与执行元件的连接部位,检查是否有磨损或松动。
2. **定期检查**:根据使用频率和工作环境,每3个月至半年进行一次深入检查,检查磨损程度及润滑情况。
3. **维修与更换**:根据检查结果决定是否需要维修或更换。如发现磨损严重、无法修复的损伤,应立即更换。
表格1:驱动与执行元件的维护周期建议
| 组件 | 检查频率 | 维修/更换频率 | 注意事项 |
|---------------|----------|----------------|------------------------------------|
| 电机 | 每日 | 每6个月 | 检查电机运转噪音,确保连接稳固 |
| 齿轮减速器 | 每周 | 每1年 | 检查齿轮磨损,保证润滑充分 |
| 液压或气动执行器 | 每月 | 每2年 | 检查压力泄露,管道连接的完整性 |
| 滑轨和导轨 | 每周 | 每3年 | 检查滑动顺畅度,确保无尘土堵塞 |
维护周期的确定需要综合考虑机器人的使用频率、操作环境的恶劣程度、零件的磨损速度等因素。对于操作环境较为恶劣或者使用频率较高的机器人,应适当缩短检查和更换周期。
## 2.2 电源系统的稳定性保障
### 2.2.1 电源模块的定期检测
电源模块是机器人运行的“心脏”,其稳定性和可靠性至关重要。下面为定期检测的步骤:
1. **断开电源**:在检测前确保机器人完全断电,以避免触电或损坏电子元件的风险。
2. **视觉检查**:检查电源模块的外观有无烧焦、变色、膨胀或其他物理损伤迹象。
3. **电气测试**:使用多用电表测量电源输出电压和电流,与额定值进行对比,确保其在规定范围内。
4. **风扇和散热系统检查**:确保冷却风扇运转正常,无阻塞物,散热片无灰尘积聚。
5. **连接检查**:检查电源模块与机器人其他部件之间的连接是否牢固,无腐蚀或氧化。
mermaid 流程图示例(电源模块检测流程):
```mermaid
graph TD;
A[开始检测] --> B[断开电源];
B --> C[视觉检查];
C --> D[电气测试];
D --> E[风扇和散热系统检查];
E --> F[连接检查];
F --> G[结束检测];
```
### 2.2.2 电压波动对机器人性能的影响
电压波动是电源系统中的常见问题,它可能对机器人的性能产生负面影响:
1. **控制系统的稳定性**:电压波动可能导致控制系统的误操作,引起运动指令的错误执行。
2. **驱动器性能**:驱动器对电源质量要求很高,电压波动可能导致驱动器损坏,或影响电机的运行效率。
3. **传感器数据准确性**:传感器数据可能会因电源波动而产生误差,影响机器人的感知能力。
### 2.2.3 电源滤波器与稳压器的使用
为了减小电压波动对机器人性能的影响,通常会在电源系统中加入滤波器和稳压器:
1. **滤波器**:滤波器能够去除电源线中的高频干扰,保护机器人内部电路,保证数据传输的准确性。
2. **稳压器**:稳压器保证输出电压的稳定性,保护敏感元件不因电压波动而损坏,延长机器人整体的使用寿命。
表格2:电源滤波器与稳压器的作用
| 设备类型 | 作用 | 使用时机 | 注意事项 |
|----------|------|----------|----------|
| 滤波器 | 去除干扰,保护电路 | 电源线进入机器人前 | 定期检查滤波效果,避免因滤波器损坏造成的事故 |
| 稳压器 | 稳定输出电压,保护元件 | 电压波动较大时 | 定期检查稳压器工作状态,避免超载和过热 |
在实际操作中,应根据电源系统的具体需求和外部环境条件选择合适的滤

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
汇川机器人操作手册专栏提供全面的指南和技巧,帮助用户从入门到精通汇川机器人。它涵盖了从基本操作到高级技术,包括编程、故障诊断、视觉系统集成、性能优化、安全操作、长效运行、多轴同步操作、个性化脚本编写、任务优化、环境适应性提升、用户界面定制、系统升级、模块化编程、精确位置控制、动态路径规划、力控制技术和传感器应用。通过这些文章,用户可以掌握汇川机器人的各个方面,提高生产效率,确保安全操作,并定制机器人以满足特定需求。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
检测精度飞跃:传感器数据校准技术的五大核心步骤

# 摘要
随着传感器技术在各个领域的广泛应用,传感器数据的精确校准成为提升测量精度和数据质量的关键。本文系统地介绍了传感器数据校准技术的各个方面,包括数据预处理、校准理论基础、实践操作以及校准效果评估。文中详细阐述了数据清洗、规范化、特征选择、校准模型建立、参数确定、校准软件应用及校准误差分析等关键技术。此外,本文对传感器数
【稳定性保证:自动化打卡App的核心秘技】:性能优化与监控的终极指南

# 摘要
随着移动应用的普及,自动化打卡App在企业中扮演了重要角色。本文首先介绍了自动化打卡App的基本概念,然后着重探讨了性能优化的基础理论和实践,包括代码层面的算法和数据结构优化,系统资源管理,以及内存管理。接着,文章分析了App监控机制的构建、实时监控技术和数据分析可视化方法。通过分析性能瓶颈和高并发场景下的调优案例,本文对比了自动化打卡App优化前后的性能差异。最
RS232通信全攻略:从基础到高级实践的终极指南

# 摘要
RS232通信协议作为数据传输的重要标准之一,被广泛应用于各种电子设备中。本文首先介绍了RS232通信协议的基础知识,随后深入探讨了其硬件和接口技术
【CRC8算法优化】:提升数据传输效率的7大策略
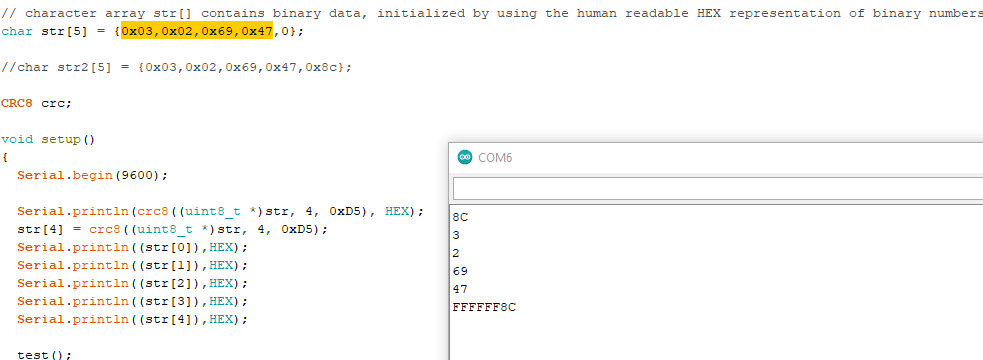
# 摘要
本文全面探讨了CRC8算法的基础知识、工作原理及应用场景,分析了其在现代通信和数据存储中的重要性。通过对算法理论基础的深入讨论,包括循环冗余校验的概念和多项式除法原理,本文揭示了CRC8算法的核心运作机制。随后,文章对优化CRC8算法的策略进行了详细分析,提出了基于理论模型和性能评估标准的优化技术,包括查表法、并行计算
APM-2.8.0应用部署:专家级最佳实践,确保稳定运行

# 摘要
APM-2.8.0应用部署是一个详细的工程过程,涉及从理论基础到实践操作,再到日常运维和扩展实践的全周期管理。本文首先概述了APM-2.8.0的基本概念和架构,然后详细介绍了部署过程中的安装、配置、调优以及验证监控步骤。日常运维部分着重讨论了问题诊断、数据备份及系统
UG许可证稳定之术:专家教你如何保持许可证持续稳定运行

# 摘要
UG许可证系统是确保软件授权合规运行的关键技术,本文首先概述了UG许可证系统的基本概念和理论基础,然后深入探讨了其工作原理、配置管理以及版本兼容性问题。接着,文章重点介绍了UG许可证在实际应用中稳定性提升的实践技巧,如硬件和网络环境的优化、许可证管理监控、应急处理和灾难恢复流程。高级应用与优化章节详述了高级配置选项、安全性加固和性能调优的策略。最后一章展望了UG许可证技术的未来发展方
【高通Camera案例剖析】:问题诊断到完美解决方案的必修课

# 摘要
高通Camera系统作为智能手机成像技术的核心,其性能和稳定性对于用户体验至关重要。本文首先概述了高通Camera系统的整体架构,并深入探讨了故障诊断的理论基础与实践技巧。通过分析具体案例,揭示了Camera系统的各种问题及原因,涵盖了预览、捕获、驱动与接口以及系统资源和性能等方面。针对这些问题,本文设计了针对性的解决方案,包括系统优化、驱动与接口修正,以
Scara机器人自动化装配案例分析:运动学仿真到实际部署

# 摘要
本文系统性地介绍了Scara机器人的设计原理、运动学基础、编程与控制技术、自动化装配流程以及实际案例分析。首先,概述了Scara机器人的基本概念和技术原理,为读者提供了深入理解的基础。随后,本研究深入探讨了机器人运动学的理论,并在仿真模拟的
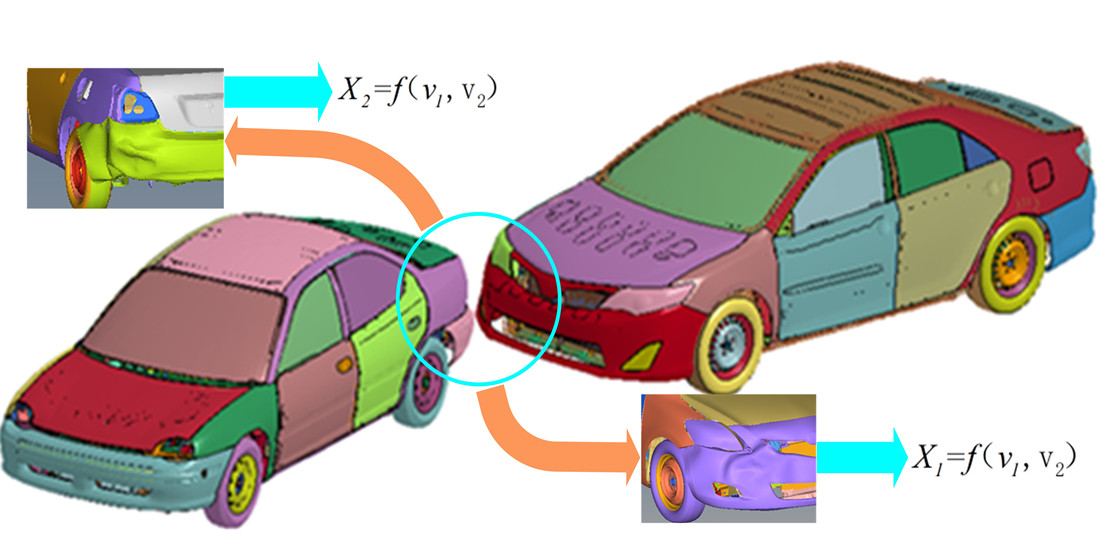
【Icepak与CFD对决】:揭秘Icepak胜过传统CFD软件的3大优势
# 摘要
Icepak作为一种专业计算流体动力学(CFD)软件,在热管理和流动分析领域展现出显著的核心优势。本文首先概述了Icepak与CFD软件的基本功能与特点,随后深入分析了Icepak在用户体验、操作便捷性以及计算性能方面的优势。通过实际案例分析,本文进一步展示了Icepak在电子设备散热设计和多物理场耦合分析中的应用效果,并与其它CFD软件进行了对比。技术挑战章节讨论了Icepak在网格生成处理和后处理数据可视化
【LS-PrePost案例实战】:深入行业应用,提升专业分析能力
# 摘要
LS-PrePost作为一款广泛应用于工程仿真的软件,提供了强大的前后处理功能和丰富的仿真分析工具。本文首先概述了LS-PrePost软件的基本界面布局和操作技巧,包括前处理环境的搭建、模拟分析流程以及后处理技术。接着,文章重点讨论了高级仿真应用,涉及高级网格技术、非线性材料模型以及多物理场耦合分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )