【IRB-6700安装与配置指南】:从零开始的中文教程,让初学者轻松上手
发布时间: 2024-12-16 09:12:08 阅读量: 4 订阅数: 4 

IRB-6700_产品手册 说明书_中文.pdf
参考资源链接:[ABB IRB6700机器人手册:安全与操作指南](https://wenku.csdn.net/doc/6401ab99cce7214c316e8d13?spm=1055.2635.3001.10343)
# 1. IRB-6700机器人概述
## 1.1 机器人简介
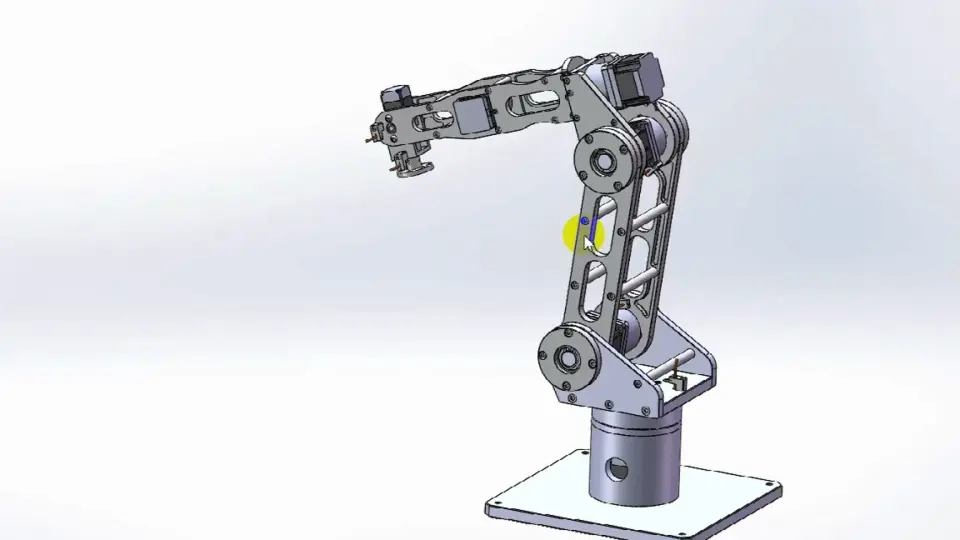
IRB-6700系列机器人是由瑞典ABB公司推出的高性能工业机器人,广泛应用于搬运、装配、打磨、喷漆等多种工业生产环节。该系列机器人具备高精度、高速度、高负载的特点,是现代智能制造系统中的重要组成部分。
## 1.2 核心特性
IRB-6700机器人采用了先进的驱动技术和精密的控制算法,其重复定位精度高,能够进行复杂的运动控制和路径规划。其良好的扩展性也意味着可以根据生产需求配置各种末端执行器和传感器。
## 1.3 应用领域
由于其灵活性和可靠性,IRB-6700机器人在汽车制造、电子产品、食品包装等行业中得到广泛应用。它能够与各类自动化设备无缝集成,通过精确的运动控制执行高要求的任务,从而提高生产效率和产品质量。
在接下来的章节中,我们将详细介绍IRB-6700机器人的硬件安装、软件配置、操作教学、调试、高级应用以及维护等关键环节。
# 2. IRB-6700机器人的硬件安装
## 2.1 安装前的准备工作
### 2.1.1 安装环境的要求和检查
在开始安装IRB-6700机器人之前,首先需要确保安装环境符合要求。环境条件包括温度、湿度、电源以及地面的稳定性等方面。IRB-6700机器人一般要求在温度为5°C至40°C,相对湿度为20%至80%的环境下工作,避免高湿度或极端温度对设备造成损伤。
此外,安装地面必须坚实稳固,以保证机器人的精确动作和防止因震动引起的精度偏差。在安装前需要进行检查,确保地面无沉降、裂缝或其他影响稳定性的问题。如果有必要,安装人员可能需要进行地面加固,以达到安装标准。
### 2.1.2 必要工具和配件清单
在进行硬件安装之前,列出并准备好所有必要的工具和配件是非常重要的。这不仅会提高安装效率,也能减少因缺少工具而导致的安装延误。对于IRB-6700机器人,可能需要以下工具和配件:
- 扳手套装
- 螺丝刀套装
- 电钻和钻头
- 水平尺
- 电源电缆
- 信号线
- 焊接工具(如:焊接机器人末端执行器时使用)
- 安全警示标志
## 2.2 机械结构的组装
### 2.2.1 主体结构的安装步骤
IRB-6700机器人的主体结构安装是整个硬件安装过程中最重要的环节之一。以下是主体结构的基本安装步骤:
1. 将机器人底座放置到预定位置,确保底座处于水平状态,并使用水平尺进行检查。
2. 将立柱组件固定到底座上。立柱通常由几个部分组成,要按照正确的顺序安装并紧固所有螺丝。
3. 按照说明书的指示,逐步将机械臂的各个关节模块安装到立柱上,确保每个关节模块都被正确安装和紧固。
4. 安装机械臂末端的执行器或者其他负载组件,确保它们被正确连接到机械臂上,并进行固定。
### 2.2.2 附加设备(如末端执行器)的安装
对于IRB-6700机器人,末端执行器可能包括夹具、焊枪、工具等,是机器人完成特定任务的关键部分。安装末端执行器的步骤通常如下:
1. 首先,将末端执行器与机器人工具更换架进行连接,按照提供的安装指南进行操作。
2. 确保末端执行器与机械臂的接口正确对齐,并且使用螺栓进行安全固定。
3. 在执行器连接完毕后,进行必要的校准,以确保机器人控制系统的精度符合要求。
## 2.3 电气连接与接线
### 2.3.1 电源和信号线的连接
在机器人安装的过程中,正确地连接电源和信号线对于机器人的稳定运行至关重要。按照以下步骤进行:
1. 打开机器人底座或控制器柜,找到电源输入端口。
2. 根据电源线缆的规格,确保使用正确的电缆连接电源,并且安装相应的电路保护器。
3. 对于信号线,需要根据接线图正确连接所有传感器和外围设备的信号线。
4. 连接完成后,应进行检查,确保所有的连接点都是牢固的,并且没有线缆裸露或短路的风险。
### 2.3.2 控制器与机器人本体的连接
IRB-6700机器人的控制器是整个系统的核心,它负责处理所有的动作指令和监控机器人的状态。连接控制器与机器人本体的步骤如下:
1. 确认控制器的电源已经关闭,以避免在连接过程中造成短路或电击。
2. 将控制器与机器人本体之间的连接电缆按照指定的端口进行连接,确保电缆没有被挤压或过度弯折。
3. 在连接所有电缆之后,再次检查确保所有的接线都是牢固和正确的。
4. 在确认无误后,打开控制器电源,并且根据机器人说明书进行初始化和校准步骤。
在进行电气连接时,务必遵守安全操作规程,如佩戴绝缘手套,确保在断电情况下进行操作,以确保安装人员的安全。接下来,准备软件安装,以完成整个机器人系统的搭建工作。
# 3. IRB-6700机器人的软件安装
## 3.1 安装软件环境的搭建
### 3.1.1 操作系统的选择与安装
IRB-6700机器人控制软件的运行依赖于一个稳定且适合的环境,其中操作系统的选择至关重要。在选择操作系统时,需要考虑与机器人控制器的兼容性、稳定性以及用户的技术背景。Windows操作系统由于其广泛的软硬件支持,常成为首选。安装步骤大体可以分为以下几个部分:
1. **系统要求确认**:确保计算机满足最低系统要求,包括处理器速度、内存大小以及可用硬盘空间。
2. **下载安装介质**:从官方渠道获取操作系统的安装ISO文件,例如Windows 10或Windows Server。
3. **刻录安装介质**:如需使用光盘安装,应将ISO文件刻录到DVD上。
4. **启动安装程序**:重启计算机,并从安装介质启动。
5. **执行安装过程**:遵循屏幕上的指示进行操作系统安装,包括分区硬盘、选择安装类型(推荐全新安装),并完成用户配置。
6. **安装硬件驱动和更新**:安装完成后,确保所有硬件设备都有正确的驱动程序,并安装最新的系统更新。
```mermaid
flowchart LR
A[检查系统兼容性] --> B[获取安装介质]
B --> C[刻录到DVD/USB]
C --> D[启动安装程序]
D --> E[执行安装]
E --> F[硬件驱动和更新]
```
### 3.1.2 驱动程序的安装与测试
驱动程序是操作系统和硬件设备之间的通信桥梁。为确保IRB-6700机器人能正常工作,必须安装与之相匹配的驱动程序。以下步骤展示了如何安装和测试这些驱动程序:
1. **准备驱动程序安装包**:下载适用于所安装操作系统版本的驱动程序。
2. **运行安装向导**:执行驱动程序安装向导,按照指示完成安装。
3. **重启系统**:安装完成后,重启计算机以确保驱动程序生效。
4. **测试驱动程序**:通过系统设备管理器或特定测试软件验证驱动程序是否正确安装,并测试其性能。
```markdown
| 驱动类型 | 说明 | 安装位置 | 测试方法 |
|----------|------|----------|----------|
| 控制器驱动 | 控制IRB-6700机器人运动 | C:\Program Files\RobotControl | 运行驱动自带的测试脚本 |
| 网络适配器驱动 | 保证机器人与网络的通信 | C:\Windows\System32\drivers | 使用ping命令检查网络连通性 |
```
## 3.2 控制系统与界面的配置
### 3.2.1 控制系统安装步骤
控制系统是管理IRB-6700机器人操作的中枢。安装控制系统包括以下步骤:
1. **下载控制系统软件包**:确保下载适用于您的操作系统和机器人版本的控制系统软件包。
2. **安装控制系统软件**:运行安装向导,并按照提示进行安装。
3. **配置系统设置**:在安装过程中,根据您的具体需求配置网络设置、用户权限和其他相关参数。
4. **启动控制系统**:安装完成后,启动控制系统进行基本配置和测试。
```markdown
| 步骤 | 详细描述 |
|------|----------|
| 1. 下载 | 访问官方网站,下载最新版控制系统软件包 |
| 2. 安装 | 双击下载的安装程序,遵循安装向导提示完成安装 |
| 3. 配置 | 进入系统配置界面,设置IP地址、网关、子网掩码等 |
| 4. 启动 | 通过开始菜单启动控制系统,并进行初始测试 |
```
### 3.2.2 用户界面的个性化设置
为了提供更高效的机器人操作体验,用户可以根据个人习惯对控制界面进行个性化设置:
1. **主题和外观**:选择一个直观易读的主题,调整界面颜色方案,以减少眼睛疲劳。
2. **快捷键配置**:根据常用操作设置快捷键,以便快速响应。
3. **工具栏自定义**:将常用的工具或功能添加到工具栏,便于快速访问。
4. **布局调整**:调整窗口和面板的位置和大小,确保符合人体工学原则。
```bash
# 示例代码:用户界面的个性化设置
user_interface customization_settings.py
# 逻辑分析:
# 这个代码示例展示了如何通过脚本调整用户界面。
# 用户需要根据实际的控制系统界面提供对应的API或脚本命令。
# 其中包括设置主题、定义快捷键、工具栏自定义以及界面布局调整等。
```
## 3.3 安装与配置教示软件
### 3.3.1 教示软件的安装
教示软件是用于编程和教导IRB-6700机器人执行特定任务的关键工具。安装教示软件的步骤包括:
1. **获取安装文件**:确保获取了与您的操作系统兼容的教示软件安装包。
2. **运行安装向导**:双击安装文件,并按指示进行安装。
3. **配置软件设置**:安装完成后,根据实际需求配置软件设置,如路径、启动参数等。
4. **安装完成与初次启动**:完成所有必要的步骤后,初次启动教示软件进行测试。
```mermaid
graph TD
A[获取安装文件] --> B[运行安装向导]
B --> C[配置软件设置]
C --> D[初次启动软件测试]
```
### 3.3.2 软件界面介绍及基本操作
教示软件的用户界面是用户与机器人交互的直接通道。以下是对界面元素的基本介绍和操作指导:
- **主界面布局**:介绍各部分功能,如程序编辑、状态监控、故障诊断等。
- **程序编辑**:如何新建、编辑、保存和加载机器人程序。
- **控制面板操作**:介绍如何使用控制面板上的按钮进行机器人的手动控制和自动执行。
- **故障诊断工具**:展示如何使用教示软件中的工具进行故障查找和解决。
```markdown
| 功能区 | 说明 | 操作示例 |
|--------|------|----------|
| 程序编辑区 | 用于编写、修改和保存机器人程序 | 在编辑框中编写代码,使用保存按钮保存 |
| 状态监控区 | 显示机器人当前状态和传感器数据 | 监控实时数据流,查看是否有异常 |
| 故障诊断区 | 提供故障查询与解决建议 | 使用故障诊断工具,输入错误代码获取帮助 |
```
确保以上步骤得到妥善执行,可以为IRB-6700机器人的高效使用奠定基础。
# 4. IRB-6700机器人的基本操作与调试
## 4.1 基本运动与操作的教学
### 4.1.1 关节运动的操作指南
IRB-6700机器人是现代工业领域中常见的六轴关节机器人,具备高度灵活的运动能力。对操作人员而言,掌握其关节运动的基本操作至关重要。在进行关节运动时,需要了解以下几点:
1. **了解关节限制**:每个关节的运动范围都有上限和下限,操作前需熟悉IRB-6700的关节运动范围,以防止超出限制导致机械损坏。
2. **调整速度与加速度**:合理设置关节的运动速度与加速度,可以保证运动平滑且高效。速度太快可能会造成部件磨损,太慢则影响生产效率。
3. **位置控制**:关节运动可以是绝对位置控制或相对位置控制。在教学中,应先从绝对位置控制开始,因为它需要操作者输入关节的具体角度值。
4. **使用教学模式**:大多数IRB-6700控制器提供教学模式,让初学者可以在无风险的环境下熟悉操作。操作前,先在教学模式下练习,熟练后再实际操作。
### 4.1.2 直线运动与圆弧运动的教学
直线运动和圆弧运动是机器人运动学中重要的基础概念,尤其在点焊、涂胶和搬运等自动化任务中非常常用。以下是教学中应注意的几个要点:
1. **直线运动**:实现直线运动主要依靠前三个关节的协调运动。在教学过程中,应该先从理论入手,解释其背后的运动学原理,然后演示如何设置路径点,使机器人沿指定直线路径运动。
2. **圆弧运动**:圆弧运动需要使用到第四个关节。教学中可以先利用模拟软件进行模拟演示,帮助操作者理解四、五、六关节如何共同作用实现平滑的圆弧路径。
3. **运动指令编写**:无论是直线运动还是圆弧运动,都需要通过编写正确的运动指令来实现。教学中要讲解如何在教示软件中输入正确的指令,并进行现场演示。
## 4.2 系统调试与参数设置
### 4.2.1 系统参数的校准与设置
系统参数的校准对于确保机器人的精确运动至关重要。以下是系统参数校准与设置的主要步骤:
1. **工具校准**:对于机器人末端执行器或其他工具进行校准,确保其定位精度符合要求。具体步骤可能包括测量工具的长度、角度,并输入控制器中。
2. **工作空间校准**:校准IRB-6700的工作空间,确保机器人能够准确地到达各个预设位置。使用校准工具和标准程序来完成这项工作。
3. **传感器校准**:如果机器人装备了视觉或其他传感器,需要进行传感器校准,确保传感器数据的准确性。
### 4.2.2 故障诊断与排除
故障诊断是保证机器人系统稳定运行的关键环节。在教学过程中,应当介绍以下诊断与排除故障的步骤:
1. **使用诊断软件**:介绍机器人系统自带的诊断软件工具的使用方法,如查看日志、运行状态及错误代码等。
2. **分析故障原因**:根据诊断信息分析可能出现的故障原因,如电机故障、传感器损坏、碰撞等。
3. **维护和更换**:针对不同的问题,提供具体的维护方法或更换步骤,如更换损坏的传感器或电机。
## 4.3 程序的编写与执行
### 4.3.1 程序结构与语法基础
编写有效且高效的机器人程序需要对IRB-6700的程序结构和语法有深刻理解。在教学中,以下内容是基础:
1. **程序结构**:机器人程序通常包含一个主程序和多个子程序,每个子程序负责一组特定的任务。先介绍主程序和子程序的结构,再讲解如何合理规划程序流程。
2. **基本语法**:包括赋值语句、条件语句、循环语句等。通过编写简单的程序,让学员掌握基本的语法结构。
### 4.3.2 编写简单程序并进行测试
为了更好地理解和掌握程序编写,教学时可采用实践与理论相结合的方式:
1. **编写示例程序**:在教示软件中,教师可现场编写一个简单的程序,例如让机器人执行一个直线运动,然后按步骤解释每一行代码的作用。
2. **执行与调试**:运行编写的程序,观察机器人的实际运动是否符合预期。如果出现偏差,引导学员学习如何通过修改代码和调整参数来解决问题。
```robotics
// 示例:IRB-6700机器人执行直线运动的简单程序
PERS tooldata tool1 := [TRUE,[[0,0,150],[1,0,0,0]],[1,[0,0,1],[0,1,0],0,0,0]];
PERS wobjdata wobj1 := [FALSE,TRUE,"",[[0,0,0],[1,0,0,0]],[[0,0,0],[1,0,0,0]]];
PROC main()
MoveL Offs(p[0,0,300],tool1), v100, fine, tool1\WObj:=wobj1;
ENDPROC
```
3. **错误处理**:教授学员如何识别和处理常见的编程错误,例如语法错误、逻辑错误等,并通过实际案例分析加深理解。
以上便是IRB-6700机器人的基本操作与调试的详细介绍。通过对这些基础知识的掌握,操作人员可以更好地将IRB-6700机器人应用于生产过程中。
# 5. IRB-6700机器人的高级应用技巧
## 5.1 末端执行器的编程与应用
### 5.1.1 夹爪的控制逻辑
在自动化生产线中,夹爪是与物料直接接触的关键执行器,其控制逻辑的设计对整个系统的稳定性和效率至关重要。为了提高控制逻辑的适应性和灵活性,程序员需要了解夹爪的工作原理及其与IRB-6700机器人的协同控制机制。
首先,必须熟悉夹爪的硬件结构,包括驱动电机、传感器以及接口类型。然后,掌握如何通过机器人控制器向夹爪发送控制指令,这些指令通常包括开合、力度调节等。在编程时,需要编写相应的程序代码来实现夹爪的精确控制。
下面是一段示例代码,用于演示夹爪开合的控制逻辑:
```python
# 假设控制器提供了控制夹爪开合的API函数:爪子开合函数
def clamp_action(is_clamp):
# is_clamp: True为夹紧,False为释放
if is_clamp:
# 发送夹紧指令到夹爪控制器
send_clamp_command()
else:
# 发送释放指令到夹爪控制器
send_release_command()
# 控制夹爪夹紧
clamp_action(True)
# 控制夹爪释放
clamp_action(False)
```
在此基础上,程序员还应考虑到夹爪在执行任务时可能遇到的异常情况,并在程序中进行相应的异常处理逻辑设计。此外,为了提高生产效率,夹爪的控制逻辑还需要与其他机器人的动作进行同步,确保动作之间的平滑过渡和时间上的精确配合。
### 5.1.2 传感器集成与使用
IRB-6700机器人在执行任务过程中,传感器的集成对于提高操作的准确性和适应性至关重要。传感器可以为机器人提供外部环境的实时反馈,这对于动态环境中的操作尤为关键。常见的传感器类型包括视觉传感器、力觉传感器、位置传感器等。
将传感器集成到机器人系统中,首先需要根据应用需求选择合适的传感器。接下来,配置传感器的参数,如采样频率、测量范围等。然后,通过编程实现传感器数据的读取和处理逻辑。在程序中,需要编写代码以从传感器读取数据,并将这些数据用于实时控制机器人的动作。
以下是一个简化的示例,展示了如何通过编程接口读取力觉传感器的数据,并根据读取的力值来调整机器人的动作:
```python
# 假设有一个API函数可以读取力觉传感器的当前力量值
def get_force_value():
return read_force_sensor()
# 当读取的力量值超过设定阈值时,停止当前动作或调整动作力度
current_force = get_force_value()
if current_force > FORCE_THRESHOLD:
stop_or_adjust_action()
```
在此基础上,还应该为传感器数据的处理逻辑添加异常处理机制,确保在读取错误或传感器故障时,系统可以做出正确的响应。
## 5.2 与外部设备的通信
### 5.2.1 串口通信的设置与使用
为了实现与外部设备的通信,IRB-6700机器人通常需要支持多种通讯方式,其中,串口通信因其简单性和可靠性而被广泛使用。在进行串口通信设置之前,程序员需要确定外部设备的通信协议以及波特率等参数。
串口通信的设置通常包括配置串口的波特率、数据位、停止位以及奇偶校验位。配置完成后,就可以通过编程向串口发送数据或接收来自外部设备的数据了。
下面是一个代码示例,展示了如何设置串口参数并发送接收数据:
```python
import serial
# 配置串口参数
ser = serial.Serial(
port='/dev/ttyS0', # 串口号
baudrate=9600, # 波特率
bytesize=8, # 数据位
parity='N', # 无奇偶校验
stopbits=1, # 停止位
timeout=1 # 读超时设置
)
# 发送数据
def send_data(data):
ser.write(data.encode('utf-8'))
# 接收数据
def receive_data():
if ser.in_waiting:
return ser.readline().decode('utf-8').strip()
# 示例发送和接收
send_data('Hello, World!')
print('Received:', receive_data())
```
上述代码中,我们使用了Python的serial库来简化串口通信的复杂性。在实际应用中,还需要考虑数据封装、错误检测及处理等高级功能,以确保通信的可靠性。
### 5.2.2 工业通讯协议的应用实例
除了串口通信,工业通讯协议如Modbus、EtherCAT、Profinet等,在机器人与外部设备的通信中扮演着重要角色。应用这些工业通讯协议,可以实现更高效、可靠的数据传输。
以Modbus协议为例,IRB-6700机器人可以通过Modbus RTU或Modbus TCP与各种外部设备进行通信。使用Modbus通信时,首先需要了解协议的数据单元格式,包括地址、功能码、数据以及校验信息。
以下是一个使用Modbus RTU协议与设备进行通信的代码示例:
```python
from pymodbus.client.sync import ModbusSerialClient as ModbusClient
# 创建Modbus RTU客户端实例
client = ModbusClient(method='rtu', port='/dev/ttyS0', baudrate=9600, timeout=1)
# 连接到远程设备
if client.connect():
# 读取寄存器数据
response = client.read_holding_registers(address=0x00, count=10, unit=1)
if not response.isError():
# 成功读取数据
data = response.registers
print("Read registers:", data)
else:
# 读取失败处理
print("Read failed: ", response)
else:
# 连接失败处理
print("Failed to connect")
client.close()
```
在上述代码中,我们使用了Python的pymodbus库,这是一个Modbus协议的实现库,用于创建Modbus客户端,实现与Modbus服务器(设备)之间的通信。在实际应用中,我们可能还需要根据具体的工业通讯协议需求,编写更复杂的逻辑,以满足生产环境中的各种通信场景。
## 5.3 自动化工作流程的设计
### 5.3.1 工作单元的创建与维护
在自动化生产线中,工作单元是完成特定生产任务的基本单位,通常包括机器人、夹爪、传感器等关键组件。为了提高生产效率,设计高效的工作单元至关重要。工作单元的设计需要综合考虑机械结构、电气连接、软件逻辑等因素。
首先,需要明确工作单元的生产任务和流程,这包括确定任务的顺序、分支条件以及可能的异常情况处理。接着,结合机器人硬件的能力,为每个任务定义具体的动作序列和参数设置。最后,通过编程实现这些动作序列,并将它们有机地组织成完整的生产流程。
在软件层面,可以使用流程图来表示整个工作流程的设计,这有助于清晰地理解任务执行的逻辑和顺序。下面是一个简化的mermaid流程图示例:
```mermaid
graph LR
A[开始] --> B[工作单元准备]
B --> C[任务1]
C --> D{判断条件1}
D -- 是 --> E[任务2]
D -- 否 --> F[任务3]
E --> G[任务4]
F --> G
G --> H[任务5]
H --> I[结束]
```
在上述流程图中,我们描述了一个工作单元中可能包含的多个任务,以及任务间的逻辑判断。这只是一个简化的示例,实际的生产流程可能会更加复杂。
### 5.3.2 自动化任务的调度与管理
自动化任务的调度与管理是确保生产连续性和效率的关键环节。这包括任务的执行顺序、优先级、资源分配以及任务间同步等问题的处理。
在进行任务调度时,可以采用基于规则的调度策略,根据生产需求和现场情况进行动态调整。任务调度系统需要能够根据实时数据,如机器人的状态、物料的到达时间等,动态分配任务给最合适的资源。
管理层面,可以使用任务队列和状态监控机制,确保任务能够被准确跟踪和及时完成。为了便于管理人员监控和调整生产过程,通常需要提供一个可视化的界面,展示各任务的执行状态和关键性能指标(KPI)。
在软件上,可以实现一个简化的任务调度模块,以代码形式展示任务调度逻辑:
```python
class TaskScheduler:
def __init__(self):
self.tasks = []
self.task_queue = []
def add_task(self, task):
self.tasks.append(task)
self.recalculate_schedule()
def recalculate_schedule(self):
# 根据任务优先级等规则重新计算任务调度
self.task_queue.sort(key=lambda task: task.priority, reverse=True)
def dispatch_next_task(self):
# 分配下一个任务执行
return self.task_queue.pop(0) if self.task_queue else None
# 示例使用
scheduler = TaskScheduler()
task1 = Task('焊接', priority=1)
task2 = Task('装配', priority=2)
scheduler.add_task(task1)
scheduler.add_task(task2)
next_task = scheduler.dispatch_next_task()
if next_task:
print(f"开始执行任务: {next_task.name}")
```
在这个示例中,我们定义了一个`TaskScheduler`类,用于管理任务的调度。通过添加任务并重新计算调度顺序,系统能够根据任务的优先级进行调度,从而确保重要任务能够优先执行。
通过上述章节的介绍,我们可以看到IRB-6700机器人的高级应用技巧涵盖了末端执行器的编程、外部设备的通信以及自动化工作流程的设计等多个方面。这些内容对于提升机器人的实际应用能力和生产效率至关重要。
# 6. IRB-6700机器人的维护与故障排除
## 6.1 日常维护的要点与技巧
在确保工业机器人的高效运作与长期稳定性能方面,日常维护工作是不可或缺的。IRB-6700机器人也不例外,其日常维护要点和技巧包括但不限于以下几点:
### 6.1.1 清洁与润滑工作的重要性
定期清洁和润滑可以减少摩擦,降低机械磨损,延长机器人部件的使用寿命。以下为清洁和润滑工作的具体步骤:
- 清洁机器人时,应使用压缩空气或非腐蚀性清洁剂清除表面灰尘和杂物。
- 润滑工作应定期进行,重点是关节和驱动链条等高摩擦区域。
- 在进行润滑前,应确保机器人处于静止状态,并按照制造商的推荐使用适当的润滑剂。
### 6.1.2 日常检查项目与周期
为了及时发现潜在问题,日常检查是预防性维护的重要组成部分。以下是日常检查的推荐项目和周期:
- 检查电源电压,确保其稳定在制造商规定的范围内。
- 检查所有的电缆和接头,确保它们没有磨损、断裂或松动。
- 定期检查末端执行器,保证其动作精准无误。
- 对于易损耗部件如密封圈、电缆导管等,应根据使用频率制定检查周期。
## 6.2 常见问题的诊断与解决
在操作IRB-6700机器人过程中,可能会遇到一些常见的软件和硬件问题。以下是一些常见问题的诊断与解决方法:
### 6.2.1 软件故障的排查方法
软件故障可能由于操作系统问题、程序错误或驱动程序不兼容等原因造成。排查方法如下:
- 检查系统日志文件,查找错误信息。
- 确保所有软件都安装了最新的补丁和更新。
- 如果怀疑是驱动程序问题,尝试重新安装或更新驱动程序。
### 6.2.2 硬件故障的检测与更换步骤
硬件故障可能涉及到任何机器人的部件,以下是检测和更换步骤:
- 使用诊断工具或控制软件的自我诊断功能来检测硬件问题。
- 对于电机或传感器等部件的更换,首先要确保机器人已经完全断电。
- 遵循制造商提供的硬件更换手册进行操作,并使用相同的型号和规格替换损坏的部件。
## 6.3 定期维护与升级指南
为了保证IRB-6700机器人持续满足生产和工艺的需求,定期的维护和系统升级是必要的。以下为定期维护与升级指南:
### 6.3.1 维护计划的制定
- 制定一个全面的维护计划,包括日常、周次、月次和年次的检查和维护活动。
- 考虑机器人的使用频率和运行环境,定制化维护计划以适应特定的应用需求。
- 维护计划应包括维护任务的清单、所需工具和材料、负责人员和维护时间表。
### 6.3.2 系统升级的步骤与注意事项
- 在进行系统升级前,应详细阅读制造商提供的升级指南,并确保备份当前系统和程序。
- 遵循步骤进行系统软件的升级,确保升级过程中不会发生断电等意外。
- 升级后进行必要的测试,验证升级是否成功,并确保机器人的性能达到预期。
维护和故障排除是确保机器人长期稳定运行的基石。通过本章节的学习,你将能够更好地理解IRB-6700机器人的维护和故障排除的要点。在下一章节中,我们将探索IRB-6700机器人在实际应用中的优化策略。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏提供全面的 IRB-6700 机器人中文指南,涵盖从安装和配置到编程、维护、故障排除和自动化应用的各个方面。专栏文章包括:
* **安装与配置指南:**从零开始的教程,让初学者轻松上手。
* **维护与故障排除:**日常维护要点和常见问题解决,确保机器人的稳定运行。
* **编程实战:**基于 ABB 机器人的自动化编程案例,提高工作效率。
* **自动化应用:**工业自动化解决方案分析,提升企业效率。
* **性能优化:**策略和技巧,让机器人更强大。
* **视觉系统集成:**机器人视觉解决方案的实现,让机器人看得更清楚。
* **传感器配置:**传感器安装和校准方法,让机器人感觉更敏锐。
* **机器人语言 Rapid 入门:**掌握基本语法和应用,简化编程。
* **负载与运动学分析:**计算最大负载和优化运动路径,增强机器人能力。
* **电源与电气系统:**电气连接和电源管理要点,确保机器人稳定运行。
* **智能传感器集成:**集成智能传感器以提高灵活性,让机器人更智能。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【弹塑性材料模型新手指南】:5大基础概念和6大应用案例解密

参考资源链接:[ANSYS/LS-DYNA 弹塑性材料模型详解](https://wenku.csdn.net/doc/4nws5pf579?spm=1055.2635.3001.10343)
# 1. 弹塑性材料模型概述
在工程实践中
内存故障诊断宝典:DDR4笔记本内存条常见问题与解决方案
参考资源链接:[DDR4笔记本内存条jedec标准设计规范](https://wenku.csdn.net/doc/2o4prfgnp8?spm=1055.2635.3001.10343)
# 1. DDR4笔记本内存条概述
DDR4作为第四代双倍数据速率同步动态随机存取存储器,是目前笔记本电脑中常见的内存类型。相较于前代DDR3,DDR4内存条在速度
WT230-U 数据手册故障排除:硬件问题快速诊断与解决的黄金法则
参考资源链接:[恒玄WT230-U:高性能蓝牙5.0音频平台规格书](https://wenku.csdn.net/doc/6460a81a5928463033af4768?spm=1055.2635.3001.10343)
# 1. WT230-U数据手册概述
WT230-U作为一款广泛应用的工业级数据采集装置,拥有
【WPS-Excel函数使用大全】:掌握这20个常用函数,工作效率翻倍
参考资源链接:[WPS表格+JS宏编程实战教程:从入门到精通](https://wenku.csdn.net/doc/27j8j6abc6?spm=1055.2635.3001.10343)
# 1. WPS-Excel函数使用概览
在现代办公自动化中,WPS-Excel作为一个功能强大的电子表格软件,其内置的函数系统为数据处理提供了极
【TJA1050数据手册】:工程师必备的核心特性与技术要点解析

参考资源链接:[TJA1050 CAN总线控制器详细应用与特性介绍](https://wenku.csdn.net/doc/646b40f6543f844488c9cad1?spm=1055.2635.3001.10343)
# 1. TJA1050芯片概述
## 1.1 芯片简
【TFC系统安装指南】:一步到位的安装、故障排除与优化技巧

参考资源链接:[TFCalc优化指南:打造最佳膜系设计](https://wenku.csdn.net/doc/4projjd9br?spm=1055.2635.3001.10343)
# 1. TFC系统的介绍与安装基础
## 简介
TFC系统(Total Flow Control)是一种先进的系统管理工具,它集成了工作流管理、资源
【兼容性革命】:轻松应对ATA8-ACS的兼容性挑战
参考资源链接:[2016年ATA8-ACS标准:ACS-4草案——信息存储技术指南](https://wenku.csdn.net/doc/4qi00av1o9?spm=1055.2635.3001.10343)
# 1. ATA8-ACS技术概述
## 1.1 ATA8-ACS技术简介
ATA8-ACS(Advanced Technology Attachment
ACS800变频器全面优化指南:提升性能与寿命的20个秘技

参考资源链接:[ABB ACS800变频器用户手册:参数设置与控制操作指南](https://wenku.csdn.net/doc/z83fd7rcv0?spm=1055.2635.3001.10343)
# 1. ACS800变频器基础知识概述
ACS800变频器是ABB公司的一款高性能电机控制设备,广泛应用于工业自动化领域。它不仅能够
图像评价技术深度探讨:如何在实际项目中应用UCIQE和UICM

参考资源链接:[水下图像质量评估:UCIQE、UIQM与关键指标解析](https://wenku.csdn.net/doc/36v1jj2vck?spm=1055.2635.3001.10343)
# 1. 图像评价技术的理论基础
在数字图像处理领域,图像评价技术是衡量图像质量和处理效果的基石。本章将探讨图像评价技术的基础理论,为后续章节中对UCIQE和UICM评价指标的深入解析打下坚实的基础。
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )