掌握YOLOv8:5分钟内学会自定义损失函数并立即提升性能
发布时间: 2024-12-11 11:14:17 阅读量: 6 订阅数: 20 
# 1. YOLOv8自定义损失函数入门
## 概述
YOLOv8(You Only Look Once version 8)是YOLO系列的最新版本,它是专注于实时目标检测的深度学习模型。自定义损失函数是深度学习训练中的一项高级技术,对于提升模型性能至关重要。本章将引导您了解YOLOv8自定义损失函数的基础知识,为接下来更深入的探讨打下坚实的基础。
## 自定义损失函数的重要性
损失函数是衡量模型预测值和实际值之间差异的指标,它在模型训练过程中起到关键的指导作用。在深度学习的目标检测任务中,通过设计合理的损失函数可以有效地指导模型学习,从而提高检测的准确性和效率。YOLOv8通过结合多种损失项,如边界框回归损失、置信度损失和分类损失,来训练其检测器,达到精准检测的目的。
## 开始自定义损失函数
要开始自定义YOLOv8的损失函数,首先需要具备一些基础知识,如PyTorch框架的使用、反向传播算法以及损失函数的设计原理。在本章节中,我们将详细介绍这些基础知识,并逐步引导您了解如何根据特定的需求设计和实现自定义的损失函数。我们将从理解损失函数的数学定义开始,然后逐步深入到如何在PyTorch中实现自定义损失函数的编程细节。
# 2. 理解损失函数的理论基础
理解损失函数的基础对于自定义和优化深度学习模型至关重要。损失函数衡量模型预测与实际目标值之间的差异,是模型训练过程中调整权重的关键依据。接下来,我们将深入探讨损失函数的作用、类型以及它们如何影响模型的性能。
## 2.1 损失函数的作用与类型
### 2.1.1 损失函数在深度学习中的角色
损失函数(Loss function)在深度学习中扮演了核心角色。它为模型提供了一个量化的评价标准,反映了模型预测值与真实值之间的误差。在训练过程中,通过优化算法,如梯度下降法,模型不断调整其参数以最小化损失函数值,进而提升预测准确性。
在实际应用中,损失函数的选取应考虑数据的特性以及模型的目标。例如,在回归问题中,常用的损失函数有均方误差(MSE);分类问题则多使用交叉熵损失函数。选择合适的损失函数能够加速模型的收敛速度,并提高最终模型的性能。
### 2.1.2 常见损失函数的介绍与比较
不同类型的损失函数适用于不同类型的机器学习问题。下面是一些常见的损失函数及其适用场景的比较:
- **均方误差(MSE)**:常用于回归问题,因为它对较大的误差施加了更大的惩罚。
- **交叉熵(Cross-Entropy)**:广泛应用于分类问题,特别是在多类别分类中,能够使模型在概率输出上的差异更敏感。
- **绝对误差(MAE)**:与MSE类似,适用于回归问题,但在异常值存在时比MSE更加稳健。
- **Hinge Loss**:常用于支持向量机和线性支持向量分类,用以处理不等式约束。
在深度学习实践中,针对具体问题选择恰当的损失函数是关键。比如,对于图像分类,交叉熵损失函数因其将模型预测转换为概率分布的特性,而成为更优的选择。
## 2.2 YOLOv8损失函数的组成
### 2.2.1 YOLOv8损失函数的数学定义
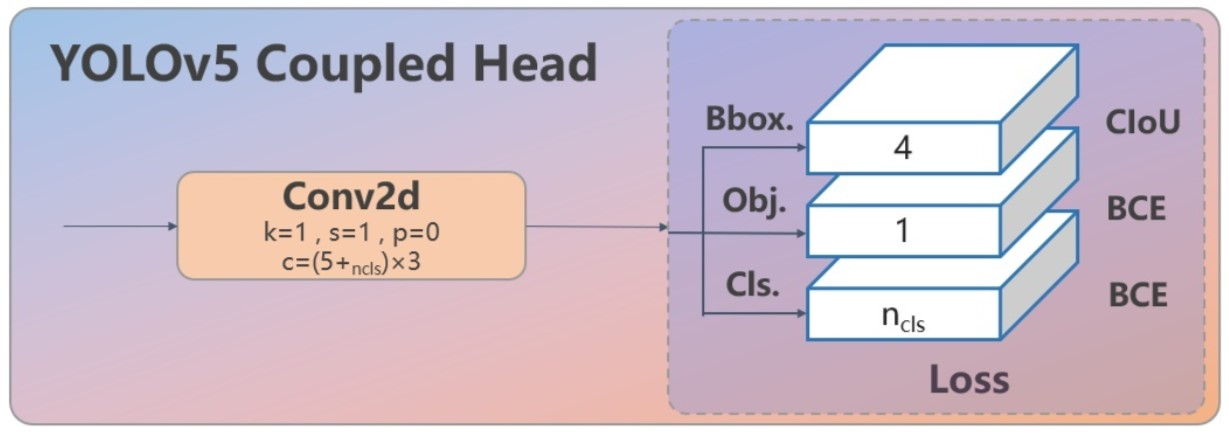
YOLOv8模型作为一个目标检测框架,其损失函数比传统分类或回归任务更为复杂。YOLOv8的损失函数通常由多个部分组成,主要包括定位损失、置信度损失和分类损失三部分。
- **定位损失**:负责评估模型在目标边界框位置预测上的准确性,通常使用MSE或GIoU(Generalized Intersection over Union)损失。
- **置信度损失**:衡量模型在目标存在与否的预测上的准确性,对于每个检测框的置信度分数进行优化。
- **分类损失**:对于目标物体的分类准确性进行评估,多采用交叉熵损失。
通过组合以上损失函数,YOLOv8能够有效地训练模型,实现目标检测任务的高性能。
### 2.2.2 核心损失项的详细解析
在YOLOv8损失函数中,每一个核心损失项都针对不同的目标进行优化。以下是对这些核心损失项的详细解析:
- **定位损失(Lloc)**:目标是使预测的边界框尽可能接近真实边界框。这通常通过计算预测框与真实框之间差异的损失来实现,能够提高检测精度。
- **置信度损失(Lobj)**:关注于目标检测器是否正确识别了目标。这项损失会增加对于正确识别目标的检测框的置信度评分,并降低错误识别目标的检测框评分。
- **分类损失(Lcls)**:旨在提高模型在目标类别判断上的准确性,基于交叉熵损失函数,它能够优化分类器权重,使其对正确类别的输出概率更高。
通过这样的损失函数设计,YOLOv8能够在不同的检测任务中均取得优秀的性能表现。
## 2.3 损失函数与模型性能的关系
### 2.3.1 如何通过损失函数优化模型
优化损失函数是提升模型性能的关键一步。以下是一些通过调整损失函数来优化模型性能的策略:
- **加权损失项**:根据不同的任务或数据分布,调整损失函数中各项的权重,以使得模型更加关注于某些损失项。
- **使用正则化**:通过添加L1或L2正则化项,可以在损失函数中增加对模型复杂度的控制,有助于防止过拟合。
- **应用自定义损失**:根据特定问题的需求,设计自定义损失函数,可以进一步提高模型性能。
- **联合损失函数**:在一些复杂的任务中,同时使用多个损失函数可以提高模型对不同部分的训练效果。
在调整损失函数时,必须平衡模型的性能和计算复杂性,以免影响模型的泛化能力。
### 2.3.2 损失函数与泛化能力的平衡
一个理想的损失函数能够使模型具有良好的泛化能力,即在未知数据上的性能与在训练集上的性能相近。为了达到这样的平衡,损失函数需要与模型的结构和学习算法相协调。
- **避免过拟合**:通过合理设置损失函数和正则化项的权重,可以减少模型对于训练数据的过度拟合。
- **损失平滑**:一些技术,如添加噪声或使用平滑操作,可以减少损失函数的尖锐值,这有助于防止过拟合并提高泛化能力。
- **多任务学习**:通过联合优化多个相关的损失函数,可以使模型在多个任务上都有良好的性能,从而提高泛化能力。
总结来说,损失函数的选择和优化是一个细致的工作,需要综合考虑模型复杂度、数据特性以及训练目标,从而设计出既合理又能提升模型性能的损失函数。
# 3. 实践操作 - 自定义损失函数
## 3.1 开始前的准备工作
### 3.1.1 环境搭建与依赖安装
为了进行YOLOv8自定义损失函数的实践操作,我们需要首先搭建一个适合的开发环境。本节将详细介绍搭建环境的步骤以及必要的依赖项。
首先,你需要一个操作系统,通常情况下,Linux是进行深度学习开发的首选环境,例如Ubuntu 20.04。确保你的系统上已经安装了Python版本3.6以上。我们还需要使用CUDA来加速GPU计算,因此需要一个支持CUDA的NVIDIA显卡,并安装对应的驱动和CUDA Toolkit。
接下来,安装PyTorch和其他必要的库。可以通过以下指令快速安装PyTorch:
```bash
pip3 install torch torchvision torchaudio
```
此外,我们还需要YOLOv8的相关库以及一些辅助工具。可以使用以下命令安装:
```bash
pip3 install git+https://github.com/ultralytics/yolov8
```
还需要安装`tensorboard`来监控训练过程,以及`pycocotools`用于处理数据集:
```bash
pip3 install tensorboard pycocotools
```
完成以上步骤后,你的开发环境应该已经搭建完成,接下来可以开始编写自定义损失函数了。
### 3.1.2 YOLOv8的模型架构概述
YOLOv8模型采用了复杂的网络结构来实现高效准确的目标检测。核心思想是将目标检测任务分解为两个并行的子任务:分类和定位。YOLOv8的核心网络部分可以大致分为Backbone、Neck和Head三个主要模块。
- **Backbone**:负责提取图像特征,通常采用深度卷积神经网络(如Darknet系列),它将原始图像转换为一系列的特征图。
- **Neck**:特征融合层,用于进一步提高定位的准确性和检测的精度。在YOLOv8中,Neck模块可能包括路径聚合网络(PANet)等。
- **Head**:负责将特征图转换为预测结果,包括类别概率和边界框坐标。
自定义损失函数的设计和集成将主要集中于Head模块,因为这是直接影响模型输出的部分,而损失函数是衡量输出与真实标签间差异的关键指标。
## 3.2 编写自定义损失函数代码
### 3.2.1 在PyTorch中定义自定义损失函数
在PyTorch中,自定义损失函数通常需要继承`torch.nn.Module`类,并重写`forward`方法。以下是一个简单的自定义损失函数的示例:
```python
import torch
import torch.nn as nn
class CustomLoss(nn.Module):
def __init__(self):
super(CustomLoss, self).__init__()
# 初始化损失函数的权重等参数
self.weight = nn.Parameter(torch.tensor(1.0), requires_grad=True)
def forward(self, inputs, targets):
# 自定义损失函数的计算逻辑
loss = self.weight * torch.mean((inputs - targets) ** 2)
return loss
```
在这个示例中,我们定义了一个简单的均方误差损失函数。`inputs`是模型的预测输出,`targets`是真实标签。`forward`方法返回了损失值,这个损失值将被优化器用于更新模型的权重。
### 3.2.2 理解自定义损失函数的细节
在定义自定义损失函数时,需要考虑其数学定义及其对模型训练的影响。损失函数应能够准确反映预测输出与真实标签之间的差异,同时还应考虑训练过程中的稳定性。
以均方误差损失为例,我们可以使用它来衡量预测值和真实值之间的差异,但在实际的计算机视觉任务中,通常会有多个输出,比如目标的位置坐标、大小、类别概率等。因此,需要根据具体的任务来设计损失函数,以确保模型能够均衡地学习到不同输出的重要性。
在编写损失函数时,我们还需注意梯度下降的稳定性,避免梯度爆炸或消失的问题。一种常见的方式是使用权重参数来控制损失函数中不同部分的影响。
### 3.2.3 实现自定义损失函数的计算逻辑
下面代码展示了如何在YOLOv8模型中实现一个简单的自定义损失函数。在这个例子中,我们将加入一个额外的项来平衡不同损失分量的影响:
```python
class BalancedLoss(nn.Module):
def __init__(self):
super(BalancedLoss, self).__init__()
# 定义额外的平衡参数
self.balance = nn.Parameter(torch.tensor([0.4]), requires_grad=True)
def forward(self, predictions, targets):
# 计算标准损失函数,例如交叉熵损失
ce_loss = F.cross_entropy(predictions, targets)
# 计算额外的平衡项,这里为一个简单的平方损失
additional_loss = torch.mean((predictions - targets) ** 2)
# 结合标准损失和额外项,使用平衡参数进行加权
loss = ce_loss + self.balance * additional_loss
return loss
```
在上述代码中,我们创建了一个名为`BalancedLoss`的类,这个损失函数结合了交叉熵损失和一个额外的平方损失项。通过平衡参数`balance`,我们可以调节这两项之间的权衡,从而找到最适合当前任务的损失函数结构。
## 3.3 将自定义损失函数集成到模型中
### 3.3.1 修改YOLOv8的网络结构
要将自定义损失函数集成到YOLOv8模型中,我们首先需要修改模型的网络结构。这通常涉及到重写模型的前向传播方法,以计算并返回自定义损失值。
以下是如何修改YOLOv8模型以集成我们上面定义的`BalancedLoss`:
```python
class YOLOv8WithCustomLoss(nn.Module):
def __init__(self):
super(YOLOv8WithCustomLoss, self).__init__()
# 初始化YOLOv8的Backbone, Neck和Head等部分
self.backbone = ...
self.neck = ...
self.head = CustomLoss() # 使用我们的自定义损失函数
def forward(self, x):
# 前向传播计算模型输出
features = self.backbone(x)
features = self.neck(features)
predictions = self.head(features)
return predictions
model = YOLOv8WithCustomLoss()
```
在此代码示例中,我们创建了一个新的类`YOLOv8WithCustomLoss`,它继承了YOLOv8模型的结构,并在Head部分使用了我们定义的`BalancedLoss`。通过这种方式,模型在训练过程中会计算并使用我们自定义的损失函数。
### 3.3.2 训练并验证自定义损失函数的有效性
最后,我们需要对模型进行训练,并验证自定义损失函数的有效性。这通常涉及到选择合适的数据集、设置优化器、进行模型训练的循环,以及在验证集上评估模型性能。
以下是一个简单的训练循环示例,使用我们自定义的损失函数:
```python
optimizer = torch.optim.Adam(model.parameters(), lr=1e-4)
for epoch in range(num_epochs):
model.train()
for images, labels in train_loader:
optimizer.zero_grad()
# 前向传播计算损失
predictions = model(images)
loss = model.head(predictions, labels)
# 反向传播和优化
loss.backward()
optimizer.step()
# 在验证集上评估模型性能
model.eval()
with torch.no_grad():
for images, labels in val_loader:
predictions = model(images)
loss = model.head(predictions, labels)
# 这里可以添加代码以保存最佳模型、记录日志等
```
在这个训练循环中,我们首先将模型设置为训练模式,然后在每个训练周期中通过优化器来更新模型的权重。在每个epoch结束时,我们将在验证集上评估模型的性能,以确保模型在未见过的数据上也能表现出良好的泛化能力。
通过对比使用不同损失函数训练得到的模型性能,我们可以验证自定义损失函数的有效性,从而指导我们进行进一步的优化。
以上内容为你详细介绍了如何实践操作自定义损失函数,从环境搭建到将自定义损失函数集成到模型中,并训练验证其有效性。希望本文能够为你在进行深度学习模型自定义优化时提供有力的参考和实践指导。
# 4. 提升YOLOv8模型性能的技巧
## 4.1 超参数调整的艺术
### 4.1.1 学习率的选择与调整
在深度学习中,学习率是控制权重更新步长的超参数,它对模型训练速度和最终性能有着决定性影响。选择不当的学习率可能会导致模型训练不收敛或收敛速度过慢。
学习率的选择通常是一个经验问题,并且需要根据模型和数据集的具体情况调整。一种常见的方法是使用学习率预热(warm-up),即在训练初期使用一个较小的学习率,然后逐步增大到一个较高的值,最后在训练后期逐渐降低学习率。
以下是使用学习率预热策略的伪代码示例:
```python
# 伪代码展示学习率预热策略
for epoch in range(num_epochs):
if epoch < warmup_epochs:
lr = initial_lr * (epoch / warmup_epochs)
elif epoch >= (num_epochs - decay_epochs):
lr = final_lr
else:
lr = adjust_learning_rate(epoch, initial_lr, final_lr, num_epochs)
# 使用更新后的学习率训练模型
optimizer.step(lr)
```
其中,`initial_lr` 是初始学习率,`warmup_epochs` 是预热阶段的轮数,`final_lr` 是最终学习率,`num_epochs` 是总的训练轮数,而 `adjust_learning_rate` 是一个根据当前轮数动态调整学习率的函数。
### 4.1.2 正则化技巧与防止过拟合
过拟合是指模型在训练数据上表现良好,但在未见数据(测试数据)上泛化能力差的现象。为了防止过拟合,可以采取以下几种正则化策略:
1. **权重衰减(Weight Decay)**:通过在损失函数中增加一个权重项的平方和,对大权重进行惩罚。权重衰减通常通过调整正则化系数(如L2范数)来实现。
2. **Dropout**:在训练过程中随机丢弃网络中的部分神经元,这可以减少神经元之间的相互依赖,迫使网络学习更加鲁棒的特征。
3. **数据增强(Data Augmentation)**:通过对训练数据进行变换(如旋转、翻转、缩放等)来生成额外的训练样本,从而增加数据多样性。
4. **Early Stopping**:在验证集上的性能不再提升时停止训练,避免对训练数据过拟合。
以下是通过Dropout进行正则化的一个代码示例:
```python
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
# 添加Dropout层
self.dropout = nn.Dropout(p=0.5)
# ...其他网络层定义
def forward(self, x):
# 在全连接层前使用Dropout
x = self.dropout(F.relu(self.fc1(x)))
# ...其他前向传播操作
```
在这个示例中,`nn.Dropout` 用于在全连接层之后的激活函数之前添加Dropout层,`p` 参数表示每个神经元被丢弃的概率。
## 4.2 模型训练的监控与分析
### 4.2.1 使用TensorBoard等工具监控训练过程
TensorBoard 是 TensorFlow 的可视化工具,它可以用来监控训练过程中的各种指标,如损失、准确率、学习率等,并且可以很方便地进行实时可视化。
首先,需要在代码中将想要监控的指标添加到SummaryWriter对象中,如下所示:
```python
from torch.utils.tensorboard import SummaryWriter
# 创建一个SummaryWriter对象
writer = SummaryWriter(log_dir="runs/my_yolov8_run")
for epoch in range(num_epochs):
# ...模型训练过程
# 在训练和验证步骤后记录指标
writer.add_scalar('train_loss', train_loss, epoch)
writer.add_scalar('val_loss', val_loss, epoch)
writer.add_scalar('learning_rate', optimizer.param_groups[0]['lr'], epoch)
# ...记录其他指标
# 关闭SummaryWriter
writer.close()
```
然后,可以通过TensorBoard命令行工具启动可视化:
```bash
tensorboard --logdir=runs
```
通过浏览器访问 `http://localhost:6006/` 即可查看实时监控的数据。
### 4.2.2 分析模型训练中的瓶颈与问题
在模型训练过程中可能会遇到各种问题,如梯度消失、爆炸、训练速度慢等。为了有效地识别和解决这些问题,可以采用以下策略:
1. **检查梯度信息**:利用梯度直方图等方法检查梯度的分布是否合理。梯度消失可以通过调整权重初始化方法和使用ReLU激活函数来缓解;梯度爆炸通常需要使用梯度裁剪(Gradient Clipping)或权重正则化来解决。
2. **分析训练速度**:检查GPU和CPU的使用情况,了解是否充分利用硬件资源。如果发现计算瓶颈,可以考虑优化数据预处理流程、使用更高效的操作实现或并行计算等方法。
3. **验证集评估**:定期在验证集上评估模型性能,及时发现过拟合或欠拟合的迹象。如果发现模型性能下降,可能需要调整学习率或尝试正则化策略。
以下是一个使用PyTorch的梯度裁剪和检测梯度消失的示例代码:
```python
# 梯度裁剪
torch.nn.utils.clip_grad_norm_(model.parameters(), max_norm=1.0)
# 检查梯度
for name, param in model.named_parameters():
if param.grad is not None:
print(f'Gradient for {name}: {param.grad.detach().numpy()}')
```
## 4.3 高级应用 - 模型微调与部署
### 4.3.1 迁移学习在YOLOv8中的应用
迁移学习允许我们将预训练模型应用到新的但相关的任务上。对于YOLOv8这样的目标检测模型来说,迁移学习不仅可以加速训练过程,还可以在数据有限的情况下提高模型性能。
实施迁移学习的基本步骤包括:
1. **加载预训练模型**:使用YOLOv8的预训练权重作为起点。
2. **替换头部层**:根据新任务的需求替换或修改分类器(通常是全连接层)。
3. **微调模型**:冻结大部分层的权重,只训练头部层或部分中间层。
4. **全面训练**:在足够的数据上训练整个模型,以进一步提升性能。
```python
# 加载预训练模型并替换头部
pretrained_model = models.yolo_v8(pretrained=True)
pretrained_model.head = nn.Linear(pretrained_model.head.in_features, num_classes)
# 微调头部层
for param in pretrained_model.features.parameters():
param.requires_grad = False
# 使用自定义数据集训练
optimizer = torch.optim.Adam(pretrained_model.parameters(), lr=0.001)
for epoch in range(num_epochs):
# ...训练循环
```
### 4.3.2 模型的部署与实时性能优化
模型训练完成后,接下来的挑战是将其部署到实际应用中。对于实时目标检测系统来说,需要保证模型具有低延迟和高吞吐量。
在部署时需要考虑的因素包括:
1. **模型优化**:使用模型压缩技术如剪枝(Pruning)、量化(Quantization)来减小模型大小和加快推理速度。
2. **后端选择**:根据目标平台选择合适的推理后端,如TensorRT、OpenVINO、Core ML等。
3. **硬件加速**:在支持GPU、VPU、FPGA等硬件加速器的设备上进行推理,以满足实时性要求。
4. **系统集成**:将模型嵌入到应用程序中,进行必要的接口适配和系统测试。
```python
# 使用TensorRT优化模型(伪代码)
import tensorrt as trt
# 构建引擎
TRT_LOGGER = trt.Logger(trt.Logger.WARNING)
builder = trt.Builder(TRT_LOGGER)
network = builder.create_network(1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH))
parser = trt.OnnxParser(network, TRT_LOGGER)
with open("yolov8.onnx", "rb") as model:
parser.parse(model.read())
engine = builder.build_cuda_engine(network)
context = engine.create_execution_context()
# 进行模型推理(伪代码)
inputs, outputs, bindings = allocate_buffers(engine)
for data in inference_stream:
# 将输入数据绑定到输入
np.copyto(inputs[0].host, data)
# 执行推理
context.execute_async_v2(bindings=bindings, stream_handle=stream)
# 获取输出数据
np.copyto(output_data, outputs[0].host)
```
在上述伪代码中,`allocate_buffers` 函数负责分配和初始化输入输出缓冲区;`inference_stream` 是包含待推理数据的数据流。这样处理后,YOLOv8模型可以部署到支持TensorRT的设备上以实现高效的实时推理。
# 5. 总结与展望
在深入探讨了YOLOv8自定义损失函数的理论与实践后,我们来到了本教程的最后阶段。本章节将对前面的内容进行回顾,并展望未来的发展方向。
## 5.1 本教程回顾与重点总结
### 5.1.1 关键点回顾
本教程的起点是对YOLOv8自定义损失函数的入门介绍,强调了理解损失函数的基础理论的重要性。我们从损失函数的角色和类型讲起,逐步深入到YOLOv8损失函数的数学定义和核心损失项的解析。接着,我们在实践中学习了如何编写和集成自定义损失函数,并且探讨了通过损失函数优化模型性能的技巧。
### 5.1.2 学习路径和进一步的资源
对于希望深入学习和实践的读者,我们提供了丰富的资源链接和参考文献,以便你们能够继续在深度学习和计算机视觉领域进行探索。接下来,我们可以考虑如何将这些知识应用到实际问题中,并通过参与开源项目和社区交流来不断进步。
## 5.2 YOLOv8与自定义损失函数的未来展望
### 5.2.1 损失函数研究的前沿趋势
随着深度学习领域日新月异的发展,损失函数的研究也在不断进步。例如,对于YOLOv8这样的实时目标检测系统,研究者正在探索如何通过更复杂的损失函数来提高检测的准确性,同时减少计算资源的消耗。损失函数在处理不平衡数据集、优化边缘情况的检测以及适应多样化应用场景中的表现,仍然是研究的热点。
### 5.2.2 深度学习框架的发展与创新
深度学习框架是实现复杂算法的基础,它们的优化直接关系到模型的训练效率和可扩展性。随着YOLOv8等模型的不断进步,这些框架也在不断地进行创新。例如,PyTorch和TensorFlow等主流框架持续提供新的API和优化技术,以支持更高级的自定义损失函数和训练策略。未来,我们可以期待这些框架在分布式训练、模型压缩、自动化机器学习等方面取得更多的进展。
通过对本教程的回顾和未来展望,我们希望激发读者在深度学习领域的探索热情,并继续为技术发展做出自己的贡献。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏深入探讨了 YOLOv8 中自定义损失函数的实现和优化策略。文章从 10 个实战技巧、6 大原则和 5 个调试策略三个方面,全面指导读者如何打造高效的自定义损失函数,提升 YOLOv8 的性能。专栏内容涵盖了自定义损失函数的理论基础、实践应用和疑难解答,为深度学习从业者提供了宝贵的知识和实战经验,帮助他们充分发挥 YOLOv8 的潜力。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Funcode坦克大战:事件驱动编程模式的C语言实现与图形用户界面(GUI)设计

# 摘要
本文全面探讨了在事件驱动编程模式下使用C语言实现的Funcode坦克大战游戏的开发过程。首先介绍了游戏的基本概念和C语言基础,随后深入讨论了游戏逻辑构建、事件处理机制和动态内存管理
【Arlequin数据清洗艺术】:打造无瑕数据集的12大技巧

# 摘要
本文全面阐述了Arlequin数据清洗的理论与实践应用。首先概述了数据清洗的重要性和基本步骤,强调了数据质量对分析的重要性以及数据清洗在业务决策中的作用。接着,深入探讨了Arlequin数据清洗的核心技术,包括与其它工具的比较、在不同领域的应用以及关键技术如数据分割、合并、转换和规范化。通过实际案例分析,展示了Arlequin在数据清洗前后的效果对比,并针对特定行业挑战提出了
掌握事务管理与数据库优化:蛋糕商城性能调优秘籍

# 摘要
本文详细介绍了数据库事务管理的基础知识,包括事务的ACID属性、隔离级别和并发控制机制,以及数据库查询优化技术和索引策略对性能提升的作用。通过对蛋糕商城的案例分析,本文展示了实际业务场景中应用性能调优的实践,包括性能瓶颈诊断、事务管理调整、查询与索引优化等。本文旨在为数据库管理员和开发人员提供一套完整的理论知识与实践经验,帮助他们更有效地管理和优化数据库性能。
# 关键字
数据库事务管理;ACID
信捷PLC XC系列软件编程:功能块与数据通讯的6项技巧
# 摘要
本文全面探讨了信捷PLC XC系列软件编程的核心概念、功能块的使用技巧、数据通讯机制及其在实际中的应用。通过对功能块的基础与高级应用的详细介绍,本文阐述了功能块的定义、分类、创建、管理以及在程序中的实际应用。同时,详细解析了数据通讯机制的原理、类型、配置以及高级应用策略。文章还探讨了功能块与数据通讯集成的技巧,并通过案例研究展示了在实际应用中问题的解决方法。最后,本文展望了新技术在PLC中
【杰理AC695N音频处理秘籍】:高品质音频解决方案揭秘
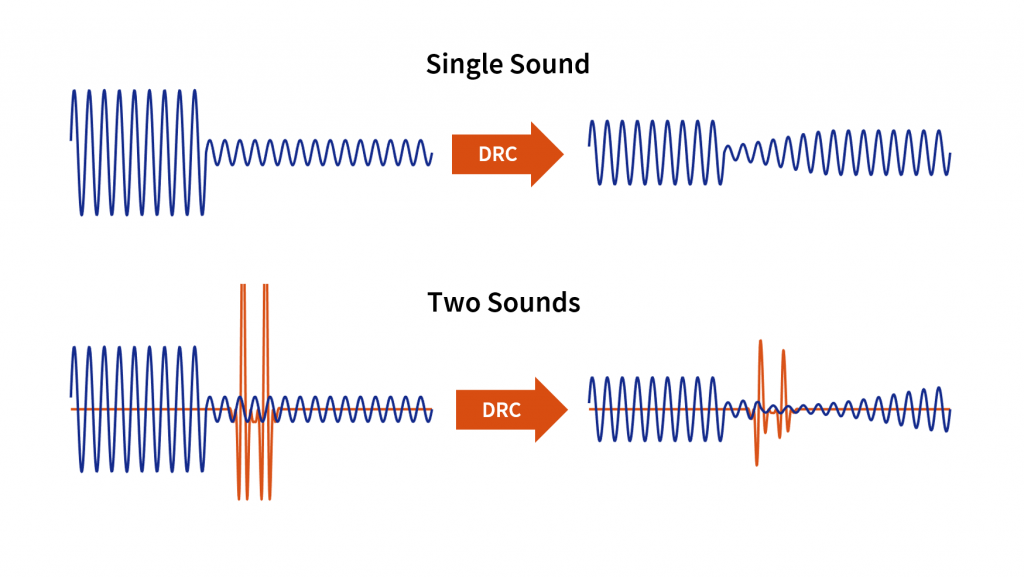
# 摘要
杰理AC695N音频处理器是一个在音频信号处理领域具有重要地位的芯片,它在现代音频设备中扮演着核心角色。本文首先对杰理AC695N音频处理器进行了全面的概述,并介绍了其硬件架构、软件开发环境以及音频处理应用案例。随后,深入探讨了音频处理的理论基础,包括数字信号处理原理、音频信号的增强技术、编码与解码技术,以及高级音频处理技巧,如实时分析与处
【动态状态管理】:用CSS控制复选框的选中与未选中效果

# 摘要
随着Web界面的动态性和交互性日益增强,CSS在动态状态管理中的作用变得愈发重要。本文深入探讨了CSS在复选框选择器的应用,展示了如何利用CSS属性和伪类控制复选框的视觉状态,以及如何通过JavaScript实现状态的动态控制和管理。文章还讨论了跨浏览器兼容性和性能优化的策略,并展望了CSS预
Adex meter AE1152D 编程接口深度剖析:自动化测量的新境界

# 摘要
本文详细介绍了Adex meter AE1152D的编程接口,涵盖了其基础理论、实践应用以及进阶功能开发。首先,概述了编程接口的功能与结构、支持的编程语言以及通信协议,并提供了接口的初始化与配置指南。接着,通过具体实践案例,探讨了数据读取写入操作、错误处理和日志记录,并分享了自动化测试与数据分析的高级应用。此
【Transmate高级使用教程】:Cat软件复杂数据结构转换的艺术
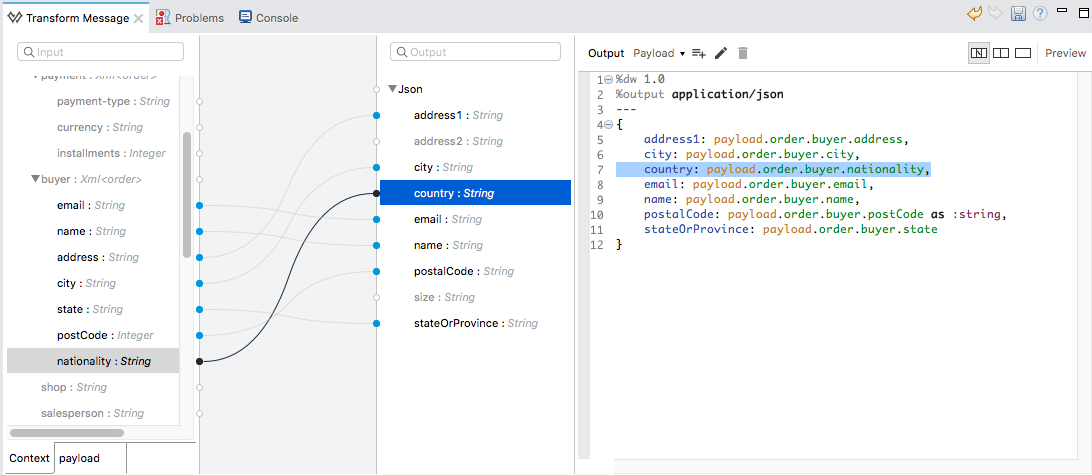
# 摘要
Cat软件作为数据转换领域的创新工具,已成为处理各种数据结构转换的首选解决方案。本文全面解析了Cat软件的核心功能、性能优化以及安全性策略,并深入探讨了其在处理复杂数据结构转换中的实用技巧。同时,本文还分析了Cat软件在多个行业中的实际应用案例,展示了其在项目管理与自定义扩展方面的能力。此外,文章也展望了Cat软件的未来发展,以及行业趋势如何影响其功
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )